机器人的协同控制研究
2018-11-14广东工业大学靳中兵杨明政
广东工业大学 靳中兵 杨明政
随着我国科学技术的发展与进步,机器人被越来越多的应用到了各行各业中。在机器人系统日愈趋于智能化的今天,对于机器人之间的协同控制研究显得尤为重要。文章首先对应用于协同控制的机器人系统进行说明定义,然后对机器人协同控制系统的发展历程和存在的问题做出论述,最后通过展望未来的发展方向说明其优化措施。
引言:协同系统因其具有很强的自治性和适应性,相关研究已经成为控制领域的一个重要方向,多机器人系统是其应用层面的一个主要分支。日本的机器人足球世界杯锦标赛RoboCup就是一个非常典型的例子,在机器人足球比赛中,各个机器人相互协作,小系统构成大系统来完成复杂的任务。另外,在很多危险领域的机器人协同系统,例如火灾现场、电路故障检测等也替代人类完成了很多难以完成的作业。
一、机器人的协同控制系统
协同控制是20世纪70年代以来,在多学科研究的基础上逐渐发展起来的一门新兴学科。在以往的机器人系统中,重点是对于单个机器人的研究,主流方向是如何改进软件和硬件以满足各种各样的需求,即通过底层嵌入式技术,中层多传感器,上层人工控制决策完成特定的功能。随着科技的发展,该机器人构架已经不能满足复杂的工业和生活要求,为此,对于机器人系统的研究,重点从单个机器人转向群组机器人,进而催促了协同控制这一热门研究方向的诞生。所谓机器人协同控制,就是多个机器人,多个智能体,协同合作,共同完成感知、认知、决策的过程。
1.主从式
主从式机器人群组协同控制中,往往有一个虚拟的领导者。系统的框架表现为一台具有计算和存储能力的计算机,并对分布于各处的机器人的行动进行自上而下的控制。在这种框架中,领导者时刻掌握着每个机器人的信息,通过综合分析,独自做出决策。而机器人群组之间,并没有直接的信息交换和相互作用的过程。如图1所示。
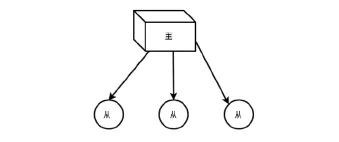
图1 主从式示意图
2.分布式
分布式是一种应用在各行各业中的思想。和区块链类似,机器人群组的分布式协同控制,和主从式相比,就是一个去中心化的过程。这种框架下的机器人群组,每个个体作为一个具有完全计算、存储、决策能力的智能体。多个智能体之间完成一个特定的任务,形成一个任务群集,构成一个整体任务。每个智能体和周围的环境都构成了一个小系统,构成机器人群组的大系统。对于个体机器人而言,不需要感知全局信息,而是通过系统离散化,和周围的环境、邻近的其他智能体之间完成信息交换,通过数据存储于计算,自主地做出自己子系统最优的决策,每个子系统结合在一起,完成整套协同系统的最优决策。如图2所示。
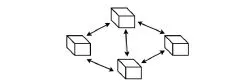
图2 分布式示意图
分布式机器人群体多采用无线传感网络,传感器之间通过无线通信。与传统的网络相比,WSN具有超大规模、资源严格受限和高度动态性等特征。利用WSN的分布式信息处理,为每一个机器人设置节点,设计无线通信网络,由用户定义的结构,来决定机器人需要遵循的规则。
对于每一个机器人而言,通过感知模块获取外界环境,再由通信模块获得区域内其他机器人的状态信息,综合分析生成决策信息,送给机器人的执行机构,最后作用于外界环境。个体机器人之间独立且具有分散性控制器,相互协商,通过无线网络实现信息的交互,继而完成庞杂的总体任务。其协同控制结构如图3所示。
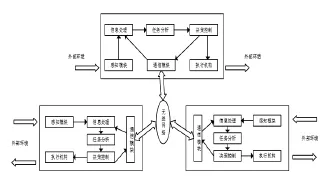
图3 分布式协同控制结构
二、我国机器人协同控制系统研究现状
1.单个智能向群体智能跨越难
目前对于单个机器人,控制上已经有了较为成熟的方案。结合嵌入式技术和传感器技术,单个机器人愈加趋于智能化。而机器人群组协同控制,在对单个智能体提出较高要求的同时,更加注重于分布式和协同。机器人群组协同控制,理论上诞生了很多算法和研究成果,但是从理论到应用落地困难。这一方面跟硬件的发展速度有关,一方面是因为理论中模拟不出应用上复杂多样的干扰因素。对于单个的智能体,和周围的环境相互作用形成的动态系统,只属于协同控制里面的一个子系统,分布式协同控制框架下的智能体,子系统与子系统之间需要相互依赖,信息共享。从单个智能体到多个智能体之间的协同控制,从主从式到分布式的协同控制,都是机器人控制上质的飞跃。
2.应用面狭窄
针对机器人协同控制的研究主要集中在编队控制上。从整体上看,编队控制属于协同控制较为简单的一环,机器人群集相互协同,保持相同的队形,在主从式和分布式上其一致性的研究发展迅猛,比如小车编队、无人机编队等。另外,让机器人群组通过相互合作汇聚到一点发展也很快,且已经有了很多相应实验平台。但协同控制急需向更大的应用面来拓展,特别是一些危险性较高的区域,将多个自主体部署到指定区域协同完成任务,如火灾搜救现场,山林搜救现场等。对于这些特殊应用环境,利用机器人协同控制系统,每个机器人通过和周围其他智能体和环境的相互配合,信息共享,做出符合人类判断的决策,可以有效的降低损失。
3.安全性能存在缺陷
任何方案从理论到应用,安全性评估都是重要的一环。机器人协同控制系统,应用上面临的问题复杂多变,对系统的鲁棒性和反应灵敏度要求很高。一方面,对于障碍物的干扰,系统要设计一套完整有效的避障方案,另一方面,在多智能体协同作业的过程中,一旦某一个智能体,某一个子系统出现故障,整体系统要立马做出反应,填补故障带来的缺陷,并把故障子系统的任务分配给其他智能体,继续完成作业。另一方面,一旦现有的机器人群组无法完成大规模的任务,在可拓展性上,再加一个机器人且不改变原有系统的情况下是否能够工作,安全性如何,都是协同控制中急需解决的问题。
三、机器人协同控制系统的优化措施和发展方向
1.智能化
人工智能技术的发展,让机器人协同控制系统的前景更加乐观。从感知和认知层面上,通过加入多传感器,机器视觉模块,让单个机器人对周围环境的解读更加准确,从而提高安全性和智能性。比如避障,从传统的超声波避障和激光避障转变为视觉避障,物体识别能分辨出普通障碍物和临近智能体,提高了可用性和安全性。关于机器视觉的算法和技术已经日益成熟,最具代表性的是英特尔公司的OPENCV库,其内部封装了大量经过代码优化的图像处理和机器学习API,为其他系统的开发和调用提供了极大的便利。机器视觉和OPENCV应用在机器人系统协同控制上, 使得单个智能体读取周围环境时更加智能,继而提供给邻居机器人的信息更加准确,提高了整套系统的智能性。
2.大数据化
机器人协同控制系统大数据化,就是把一些难以处理的问题通过计算机的计算能力来合理解决。大数据是一个行业,更是一种思想,数据收集、数据传输、数据存储、数据建模、数据分析各个阶段都是非常重要的数据生命环节。大数据行业已经有了很多成熟的框架,如Hadoop、Spark、Storm等都能够和其他技术相融合,达到软硬件的结合,提高服务的稳定化。此外,机器人协同系统利用数据库应用、数据加工做数据分析和结合,从而帮助智能体做决策。自主决策方面,协同控制的大数据化是大环境下的发展趋势,也是从业人员的研究热点问题。多智能体系统,每个机器人完成的任务都是很小的,有限的,但通过相互协作,结合大数据技术,开发云协同平台,云资源与应用系统交互计算,能够为每一个智能体,为整个系统,带来更加有效正确的决策信息,从而拓展机器人协同系统的应用面和安全性。
四、总结
综上所述,机器人的协同控制是一个多学科交叉且复杂的研究方向,随着科学技术的发展,其具有极大的应用前景。就我国目前的行业发展来看,关于机器人协同控制,已有大量学者对其进行理论研究,但应用上因为其安全性、实用性而落地困难。针对这个问题,笔者提出了智能化和大数据化的观点,既是对现有问题的优化,也是对未来发展方向的展望。希望机器人协同控制系统发展更快更好。
