基于OpenWrt的变电站巡检机器人系统设计
2018-11-14郑州理工职业学院赵瑞芹
郑州理工职业学院 赵瑞芹
针对智能变电站无人值守的实际需求,本文设计一种基于Open-Wrt的变电站巡检机器人。该巡检机器人是以OpenWrt无线路由系统为核心的移动式无线基站,具备小型化、多功能、完全自主运行功能的履带式机器人,可携带网络高清摄像机、红外测温仪、拾音器等传感器通过巡检机器人运动控制系统实现自主导引。在站内无线局域局域网环境下完成巡检数据上载,同时由巡检监控管理中心实时反馈现场信息并自动生成巡检报告。通过无线充电桩,实现设备的自主充电。实验结果表明,该设备不仅能够有效降低人工巡检的劳动强度,提高现场实际巡检效率;而且满足电网现场实际应用的需求。
1 概述
随着电子技术的迅速发展,特别是计算机技术和“五遥”功能的实现。电网无人化值守发展程度不断提高,现代电气自动化技术和远程测控技术已基本可以实现变电站内设备远程监控,无人值守的管理制度极大的提高生产效率、降低电网的运维成本。实现智能变电站无人值守的关键环节之一就是智能巡检终端的应用。
智能变电站巡检机器人能够有效的解决人工巡检过程中存在的工作效率低、巡检质量良莠不齐、运维成本高等不足之处。对此国内外许多研究机构开展了关于无人值守变电站智能巡检机器人应用的研究。圣西保罗大学研制的悬挂式移动机器人,由高空钢索导引对电气一次设备实时温度监测,但是线路设计成本高且监测项目单一。新西兰电网公司和梅西大学联合研发的全地形变电站巡检机器人,能够识别现场四周环境,但是智能化程度不高只能满足远程遥控方式工作。国网电力机器人技术实验室研制的第四代巡检机器人基本能够实现对变电站设备的智能化巡检①,读取各个监测点RFID标签信息完成对各个电力一次设备的数据采集,但是装置结构复杂、存在信息采集易缺失、受限于监测点视角以及监测轨迹、无法实现对电力设备的全方位监测。
针对上述研究结果分析可知,现阶段变电站巡检机器人巡检内容单一、机械电气结构冗杂,无法完全实现自动导引、故障诊断分析等复杂功能。对此本文设计一种基于OpenWrt的变电站巡检机器人,该设备符合未来电网智能化、小型化、工具化的标准②,能够实现完全自主运行并且可配合后台监控中心平台通过携带相应的传感器设备实现对一次电力设备的遥控监测,同时自动生成巡检报告;变电站内装设有柔性无线充电桩,实现自主充电。目前,该巡检机器人现场模拟运行效果表明,基本满足传统变电站内所需人工巡检的功能要求。
2 基于OpenWrt的变电站巡检机器人系统总体结构
根据目前现场变电站巡检机器人的实际运行情况以及相关的性能指标要求,本文提出一种基于OpenWrt的变电站巡检机器人。该装置可携带网络高清摄像头、红外测温仪、拾音器等多路传感器,通过机器视觉、红外测温、音频识别等方法,监测并记录电气一次设备的温度、图像以及噪声等信息,并且能够识别设备的部分电气问题,如外观异常、开关或刀闸的位置、仪表读数、油位计位置等,最终由后台巡检监控管理中心处理并生成统一规范的巡检报告,自动按巡检时间保存到信息管理系统。模拟规划现场最优巡检路径,采用磁导引以及超声波避障的方法实现自主巡检。当装置在电量不足或者完成巡视任务后,巡检机器人能够自行返回充电室自动充电并且上载数据。
变电站巡检机器人系统设计采用服务器/客户端模式。系统总体结构分别由巡检监控管理中心(Client模式,客户端)、站内无线局域网、巡检机器人(Server模式,服务器端)组成。客户端与服务器端之间遵循TCP/IP和UDP通信协议,巡检监控管理中心作为客户端通过无线局域网数据链路层索引巡检机器人的服务器IP地址,实时获取服务器端的反馈信息,综合分析生成该时段的相关巡检信息反馈数据包。如图1所示。

图1 系统总体结构图
3 基于OpenWrt变电站巡检机器人关键技术
3.1 巡检监控管理中心
巡检监控管理中心是根据NET Framework和AForge.NET框架下开发的一款具备模糊推理、图像识别、视频解码、数据压缩存储管理等功能的应用程序,可支持Windows操作系统下的计算机终端。该应用以C#高级语言为基础,采用高度模块化的程序工具类库开发,可移植性以及扩展性强。
同时考虑到系统所要求的各项功能、组成结构、后期扩充性要求和开发环境的方便程度,本系统的软件开发采用面向对象的模块化程序设计方法,以现在通用的Windows操作系统作为运行平台,选择Microsoft Visua Studio 2010作为开发工具,采用功能更为强大的C#开发语言③。开发客户端软件操作界面,配合相应的下位机的服务器端应用程序。
该系统结构如图2所示,巡检监控管理中心采用人机式交互界面,该界面下涵盖控制面板、监测面板、数据管理系统三大功能库。人机交互界面是用户进入操作界面的管理入口,用户可通过密钥进入软件操作界面,实现对系统中不同功能库的各项具体操作。作为用户最直观操作界面,该界面以调用功能库下控件的响应事件控制巡检机器人完成一系列动作指令以及相关数据分析、处理。

图2 巡检监控管理中心系统结构
(1)控制面板通过运动解码器可分别实现对机械臂的空间位移和机器人运动轨迹的控制;调用巡检机器人系统自带的SertoNet网口转串口数据类库完成数据上载;根据巡检计划对巡检任务进行配置;巡检机器人初始化设置即现场监测位置定点信息、IP地址设置、机械臂顺序运动控制系统设置等一系列根据现场实际情况进行的出厂后初始化信息配置。
(2)监测面板作为巡检机器人现场运行状态信息反馈的功能库,可显示现场实时视频监控画面、红外测温读数、设备噪声趋势图。同时记录汇总变电站内电力一次设备仪表度数、开关闭合状态等相关信息的运行状态表,反馈巡检机器人的设备运行状态和电量实时监控画面,并且根据现场变电站内2维地图显示当前位置。在巡检任务结束后自动生成巡检报告,存储到数据管理系统。
(3)数据库管理系统中用户可进行登录、管理、查询相关巡检报告。综合Aforge.Fuzzy类库中模糊推理工具、图像识别数据库以及噪声分析数据库对巡检数据进行分析、处理,并由巡检报告制作工具生成最终巡检报告,分类存储到巡检报告数据库。
3.2 变电站内无线局域网部署
综合考虑变电站内强电磁干扰、建筑物的隔断削弱作用以及红外测温仪和网络视频信号上传过程中的高带宽要求,本文采用5.8GHz频段信号的WiFi设备作为无线接入点(Access Point,AP)建立变电站内无线局域网④。该局域网具备高速接入、信号传输稳定、抗干扰性强以及高传输带宽的特点。
站内无线局域网系统通架构分为移动式无线基站(安装在巡检机器人上的OpenWrt无线路由设备)、无线基站(部署于巡检线路周围)、网络交换机三部分组成。无线基站的部署采用扇区天线或者全向天线尽可能的覆盖巡检机器人运动轨迹,在避免相同信道干扰前提下,AP部署采用点对多点的不同频点邻近覆盖组网方式,减少网络延时和避免由于单点故障造成的网络瘫痪。5.8GHz频段信号的WiFi设备在满足站内无线信号的带宽和传输稳定性的要求下,通过光纤连接设备以太网端口与交换机端口保证通信信道的高速性,同时使用支持标准IEEE 802.3af POE以太网线供电的FS728TP交换机,避免变电站内运距离架设强电线路的安全性问题。采用AutoCell射频自动管理技术保证站内无线局域网信道合理规划以及高效的功率调整⑤。其巡检线路的无线信号覆盖范围平面图,如图3所示。
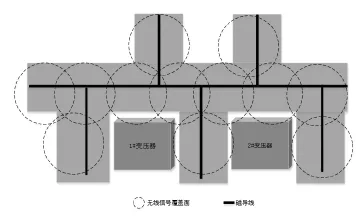
图3 无线信号覆盖平面示意图
3.3 巡检机器人电源供电系统设计
考虑到充电接口长期插拔操作易造成触点磨损,导致充电设备接触不良,降低充电效率;同时裸露充电设备容易引发电火花,存在重大安全风险⑥。因此巡检机器人采用基于电磁感应原理的无线充电方式,实现设备自主充电。无线充电装置包括车载充电接收电路和地面充电发射电路。无线充电桩地面安装楔形卡槽,一方面可以摆正车体的充电位置,保证最大充电效率;另一方面该卡槽作为提供充电装置的接通的电信号装置,保证设备在充电区域内持续可靠供电,离开时自动断开电源。

图4 电源供电系统结构
巡检机器人的电源供电系统主要包括无线电能发射模块、BMS控制模块和无线电能接收模块,具体电源供电系统结构如图4所示。
无线电能发射模块以全桥逆变结构的高频电路为核心,将由发射模块供电电路的整流稳压的36V直流电逆变成高频交流信号传送到无线电能接收模块。其中方波信号发送电路提供PWM波作用于驱动电路,保证桥臂的可靠导通与截至⑦。
无线电能接收模块通过整流滤波电路将交流电整流成锂电池组所需的直流电,充电过程由BMS控制模块管理。最终由锂电池组提供巡检机器人供电模块提供所需的36V工作电压
BMS(Battery Management System,电池管理系统)控制模块能够实时监测巡检机器人的耗电量信息,实时反馈到巡检监控管理中心。实现锂电池组均衡合理的充电和用电。
3.4 巡检机器运动控制系统设计
巡检机器人的运动控制系统以基于PowerPC的嵌入式实时操作系统为核心,涵盖有全局路况检测模块、巡检机器人移动控制模块以及机械臂顺序控制模块。如图5所示。

图5 运动控制系统结构
全局路况检测模块主要包括磁导引检测电路、超声波避障电路、红外反射传感器电路,可提供移动过程所需的磁导引轨迹、路障信息、以及路面黑色定位标签的模拟信号。
巡检机器人移动控制模块采用MOSFET搭建的两路并联H桥电路,同时外接36V直流电。该电路具有输出电流大,响应速度快的特点,能够将全局路况检测模块信号提供的路况模拟信号,经中央处理系统分析转换成巡检机器人移动控制模块所需的数字信号,实现巡检机器人自主循迹、位置锁定。
机械臂顺序控制模块硬件电路由相互独立的六片内置H桥电路的L298N驱动芯片组成,通过PWM波输出实现对六路伺服电机的单点控制。结合BP神经网络算法对现场不同监测点所需机械角度样本进行训练,按照顺序存储方式将不同监测点最优机械角度保存到机械臂顺序控制模块存储单元。
3.5 OpenWrt无线路由系统
OpenWrt无线路由系统作为连接站内无线局域网和巡检机器人的移动式无线基站,其系统架构如图6所示。

图6 OpenWrt无线路由系统架构
该系统主要由底层硬件接口、相关设备驱动、以AR9331X芯片为核心的OpenWrt操作系统组成。具备无线图传、数据包转化和路由等功能。其中OpenWrt作为一款集成度高、可扩展性强,同时支持二次开发的嵌入式Linux系统,用户可根据设备功能需求开发具备特定功能的嵌入式系统固件。根据巡检机器人的功能需求,在OpenWrt中植入网络路由组件实现无线路由功能,同时根据开源的固件库编译一个包含Kmod-video-core(视频设备驱动API)、Mjpg-Streamer(图像流传输API)和SerToNet(串口转网口API)等组件设计的OpenWrt固件系统。
该路由设备采用OFDM(正交频分复用技术)可通过5.8GHz专网射频频段接入站内无线局域网,支持高达432Mbit/s的数据共享吞吐量,实现数据的高速、稳定传输。
4 基于OpenWrt的变电站巡检机器人现场应用
巡检机器人样机研制完成后,对产品各项基本性能指标进行初步测试。并在河南某35kV变电站内进行初步现场模拟实验。
该35kV变电站容量为2×15MVA,电压等级为35/10kV,占地面积为34.9m×19.3m,共673.5㎡,35kV侧2路总进线,10kV侧共10路出线。根据文中变电站内无线局域网部署方案,现场站内无线局域网由8台5.8GHz无线路由设备、1台FS728TP交换机组成。现场测试区域共2台巡检机器人一台主用、一台备用,所需巡视区域共计450个观察点,巡视道路总长2.5km,完成一次巡检任务约90min。
巡检机器人接收监控管理中心发布的巡检任务,根据现场布置的磁导线轨迹和现场路面黑色定位标签,按照各个观察点第一次模拟巡检训练样本存储的巡检规划信息,通过巡检机器人运动控制系统以及各类传感器设备完成观察点信息采集,巡检任务结束自行返回无线充电桩充电,同时上载数据。用户通过调用巡检监控管理中心主机的巡检报告以及现场相关检测数据获取当前测试情况,如某一次巡检任务中10kV出线断路器设备红外热成像图以及设备温度幅值大小,具体如图7所示。

图7 断路器设备红外检测温度图
5 结束语
本文设计一种基于OpenWrt的变电站巡检机器人,并投入现场试验。该巡检机器作为可移动式无线基站,具备小型化、多功能、完全自主运行等特点。通过携带电力一次设备检测所需传感器,根据站内地面磁导线以及地面定位标签由巡检机器人运动控制系统实现全路况自主导引。由现场部署5.8GHz频段信号的无线AP设备构成的无线局域网完成巡检数据上载,同时用户可通过巡检监控管理中心实时查看现场实时反馈信息并在巡检结束后自动生成巡检报告。现场布置的无线充电桩,实现设备的自主充电。现场运行情况良好,基本达到预期效果。随着智能电网的高速发展,无人值守变电站已成为智能变电站的主流趋势。巡检机器人作为无人值守智能电站的重要环节,具有重要的发展前景。
引文:周立辉,张永生,孙勇等,智能变电站巡检机器人研制及应用:电力系统自动化,2011;②蔡焕青,邵瑰玮,胡霁等,变电站巡检机器人应用现状和主要性能指标分析:电测与仪表,2017;王开宇,基于C#的数据与视频监控上位机软件设计:现代电子技术,2017;袁慧,基于安全隧道和IEEE802.1x的变电站安全AP设计:电力信息与通信技术,2016;王新峰,刘霜霜,WLAN网络中无线射频资源的自动管理策略:计算机应用与软件,2016;宋志锋,吴秀海,孟杰等,变电站巡检机器人充电技术研究:现代制造,2014;熊承龙,沈兵,赵宁,基于电磁感应的无线充电技术传输效率的仿真研究:电子器件,2014。
