助步车智能电子服务功能的研发
2018-11-14广东技术师范学院天河学院邓保青王宇枢
广东技术师范学院天河学院 邓保青 王宇枢
对于老年人和行动不便的人群而言,助步车是其方便出行所依赖工具。随着科技的发展及社会的和谐进步,市场上急须推出一款功能齐全、舒适便捷、安防完善,能为所需人群安全出行保驾护航的智能助步车。为了满足使用者的需求,该课题对助步车在智能电子服务方面做了深入的研究与探讨。
1.系统总体设计
本设计是基于STM32F103C8T6微控制器为主控件,对血压和心率测量模块、GPS定位模块、GPRS通话模块、LED照明模块、报警模块以及语音等模块,进行自动控制而开发的助步车的智能电子服务系统。系统模块结构框图如图1所示。
2.系统硬件设计
该系统由以下模块组成:CPU(STM32F103C8T6微控制器)控制模块、血压和心率测量模块、GPS/GPRS模块、光照采集模块、语音模块、OLED显示模块电路和按键模块。由STM32F-103C8T6微控制器构成的核心电路原理图,如图2所示。
2.1 控制模块电路
STM32F103C8T6微控制器作为CPU控制模块。

图1 系统模块结构框图
2.2 心率测量模块(Pulse Sensor)
心率测量采用的是Pulse Sensor,使用的测量方法是脉搏容积法,原理是利用人体组织在血管搏动时造成透光率不同来进行脉搏测量。光源采用对动脉血中氧和血红蛋白有选择性的一定波长(500nm~700nm)的发光二极管,由于脉动充血容积变化导致这束光的透光率发生改变,此时由光电转换器接收经人体组织反射的光线,转变为电信号并将其放大输出。由于脉搏是随心脏的搏动而周期性变化的信号,动脉血管容积也呈周期性变化,因此光电变换器的电信号变化周期就是脉搏率。心率测量电路框图如图3所示。
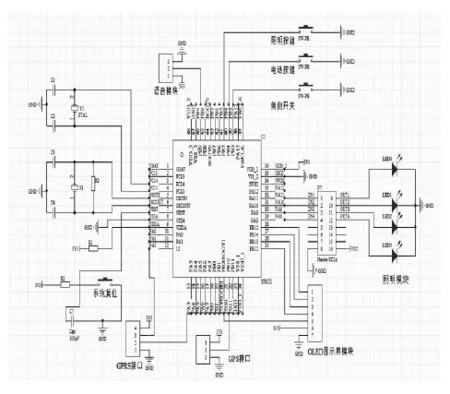
图2 核心电路原理图

图3 心率测量电路框图
2.3 血压测量模块
血压测量采用XGZP6847型压力传感器作为敏感元件,并集成了数字调理芯片,对传感器的偏移、灵敏度、温飘和非线性进行数字补偿,并以供电电压为参考,能自动产生一个经过校准、温度补偿后的标准电压信号。
单位换算关系:100KPa=1bar≈14.5PSI≈750mmHg

图4 压力传感器特性图
压力传感器的压力与电压换算关系,如表1所示。

表1 压力与电压转换关系图表
2.4 GPS/GPRS模块电路
GPRS/GPS A7模块是整个系统的GPS定位、GPRS无线通话和短信息的核心,可实现在突发情况下的紧急通话以及实时查询位置信息。使用"AT系列指令”配置GPRS应用,可通过"ATD+手机号码+;"设定呼叫号码。在挂断电话时,只需要通过程序向GPRS模块输入"ATH"指令,便可挂断电话。进行GPS定位时应该提前配置相关指令,数据以9600bps的波特率输出,发送"GETGPS"指令可实时查询位置。A7模块收到命令后便会进行短信息的发送和主动呼叫被设定的号码,短信息发送的内容为GPS实时获得的经纬度位置信息。
2.5 语音、OLED显示模块电路
ISD1820芯片构成语音模块,先通过STM32存储相关的歌曲,也可通过MP3进行播放。系统OLED显示模块采用自发光材料的主动式驱动(有源驱动),驱动电压低,能够及时接收显示STM32系统的数据。
2.6 按键模块
本设计中使用了轻触按键,按键共有4个引脚,对脚连通,以便手动控制设备工作。为了避免静电的干扰,5个手动控制按键均采用对地按键类型,按键模块直接与微控器相连,通过微控器发送数据信号,分别用于控制灯泡的亮灭、语音模块的语音录入、播放、清除重置功能、主动呼叫和发送位置信息并接听来电。
3.系统软件设计
助步车软件系统的程序构架分主程序、各个模块的子程序和数据对接处理子程序。软件流程图如下图5所示。

图5 程序流程图
主系统软件设计采用C语言实现,主系统分主程序与子程序,子程序中又主要包括心率、血压控制程序、LED控制程序、GPS/GPRS控制程序等几个子程序模块。GPRS通讯软件设计是通讯系统的核心部分。
4.系统调试
4.1 硬件调试
当硬件设备焊接好之后,就对整个系统的硬件部分进行测试。观察硬件系统运行是否正常,是否能够实现预定功能,确保整个硬件部分准确无误。
4.2 软件调试
程序的整体结构设计流程和软件调试步骤都与使用的调试软件有关。本系统利用MDK软件进行软件编程与代码调试,软件调试步骤可分为两大部分,即为串口调试和MDK软件调试。调试程序采用独立模块程序设计技术,将每个模块的代码单独调试,实现相应的功能,当所有模块都调试成功之后,再将所有功能模块组合为一整体,进行总体系统构架调试。当所有功能都实现之后,还可以对程序进行优化,并且还可以根据硬件情况,再增加一些其他功能。
5.总结
本课题以STM32F103C8T6为核心控制部件,通过软件和硬件的结合,对助步车智能电子服务功能进行了深入探讨和研究,充分发挥软件编程灵活、硬件线路简单的特点,并最大限度挖掘控制芯片片内资源,各项功能均达到设计要求。
虽然最终完成了预期设定的所有功能,但是随着技术水平的提高,助步车智能控制系统的性能和软件中部分算法有待进一步优化。不久的将来,功能完善的智能助步车,将大大增强用户使用的安全性与方便性,产品将最大程度地满足急速发展的助步车市场的需要。
