基于连通域分析和笔画宽度变换的船名检测方法
2018-11-13钱江张桂荣姚江季建中何平顾宋华
钱江 张桂荣 姚江 季建中 何平 顾宋华
摘 要:为实现昼夜间船名精准检测,本文提出一种基于计算机视觉的船名检测方法。该方法使用Retinex算法对船舶图像预处理,随后基于MSER获取文字候选区域,根据先验知识和笔画宽度变换特征得到最终候选区域,最后使用级联分类器确定单字符区域,进而得到船名位置完成船名检测。实验结果表明,该方法在昼间和夜间均能实现船名精准检测,昼间船名检测准确率高达90.4%。
关键词:计算机视觉 船名检测 最稳定极值区域 笔画宽度 级联分类器
1.引言
近年来内河航运发展迅速,运输船舶数量显著增加,人工审核船名信息工作逐渐繁重,一种有效的船名检测方法亟待提出。
崔晶等人基于无线局域网,结合AIS系统实现了船舶识别;何春燕[]利用雷达进行船舶目标检测,通过抗干扰算法提高船舶检测率;郑艳[]基于RFID技术提出有效的防碰撞算法实现船舶识别;潘美莲在AIS系统中基于计算机视觉实现船舶铭牌识别和船舶跟踪。上述四种方法存在着人为干扰大、部署成本高等问题,本文提出的方法基于现有视频监控设备改造,可自动识别船舶信息,满足监管监控要求。
在水运领域,计算机视觉技术多应用于船舶监控、船舶跟踪和船舶流量统计。基于视觉的船名检测技术尚处于起步阶段,较少研究学者对其进行研究。因此本文对于船名字符检测的研究在一定程度上弥补了船名檢测在计算机视觉方面的空白。
2.船名检测方法
基于计算机视觉的船名字符检测流程如图1所示。第一步,将船舶图像转化为灰度图像并使用 Ret i nex算法进行预处理;第二步,搜索图像的最稳定极值区域(MSER),将MSER区域作为船名字符候选区域;第三步,利用几何形状、尺寸等先验知识对候选区域进行筛选过滤,得到符合先验知识的字符候选区;第四步,对符合先验知识的文字候选区域做笔画宽度变换,设定笔画宽度均值方差阈值,得到符合笔画宽度特征的字符候选区域;第五步,训练一个文字非文字分类器,用二分类器对字符候选区域进行分类得到最终文字区域。
2.1船舶图像预处理
由于室外拍摄船舶图像易受光照、天气等环境因素影响,应对所得船舶图像预处理以提高字符检测精度。随后对彩色船舶图像灰度化,减少后续处理计算量,之后采用 Retinex算法进行对船舶图像进行对比度增强处理。
R e t i n e x理论由L a n d和McCann提出,该理论认为原始图像S(x,y)可以看成是光照图像L(x,y)和反射率图像R (x,y)的乘积,即S(x,y)=R(x,y)* L(x,y)。基于Retinex的图像增强的核心即从原始图像S(x,y)中估计出光照L(x,y),从而分解出R(x,y),消除光照不均的影响。
Retinex理论假设图像的噪声来源于图像各个位置反射率不同,因此去除反射图像的噪声便可还原图像。首先将图像变换到对数域,图像变换过程如式;反射分量噪声通过归一化去除,归一化过程如式;对去噪后的反射分量求指数,反变换到实数域得增强后图像。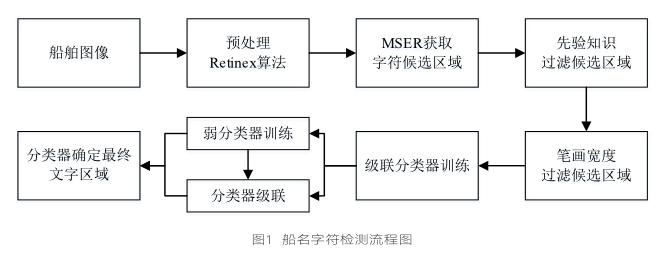

图2左图为灰度化图像,右图为使用Retinex算法预处理后的图像。从图中可以看出,预处理后图像对比度得到提高,船名特征得到增强。
2.2连通域分析
本文采用基于连通域的方法进行文字检测,提取最稳定极值区域作为文字候选区域,该算法对图像具有较强的仿射变换不变性。
2.3笔画宽度变换与级联分类
笔画宽度变换(Stroke Width Transform, SWT)由微软提出,用于自然场景文字检测。笔画宽度特征属于文字的独有特征,一般而言统一的文本都具有统一的笔画宽度,如图4所示。
最终的文字区域由一个级联分类器确定,因此需要训练一个级联文字非文字二分类器对字符候选区域进行分类得到最终文字区域。本文采用的文字非文字二分类器基于局部二值特征和Adaboost算法进行级联,级联分类器如图5所示。
弱分类器的训练过程如下:计算所有训练样本的特征值并排序;对顺序排列的每个元素计算四个指标,全部文字样本的权重和T0、全部非文字样本的权重和最小T0、在此元素前文字样本的权重和S0、在此元素前非文字样本的权重和S1;选取当前元素特征值和前一个特征值的均值作为阈值,阈值的分类误差为e =min (S1+(T0-S0),S0+(T1-S1));将误差最小的阈值作为最优阈值,得到弱分类器。
将若干个弱分类器级联成强分类器过程如下:训练库样本数为N,其中文字样本为N0,非文字样本数为N1,最大迭代次数为T,初始化样本权重为1/N;第一次迭代训练所有样本得第一个弱分类器;提高上一步中被误识别的样本权重,将错分类样本和新样本作为下一个弱分类器的训练样本;重复训练新的弱分类器,T轮迭代后得到T个最优弱分类器;最后将弱分类器组合成强分类器,组合方式如式(3)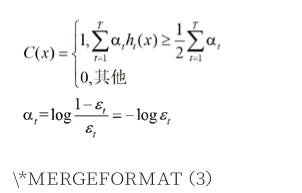
使用级联分类器对字符候选区域分类,得到每个区域的类别和得分,对得分设定一定阈值,大于阈值则视为合格文字区域,组合文字区域得到船名区域。图6左图为分类器对字符候选区域的分类结果,右圖红框为最终船名检测区域。
3.实验及分析
在级联分类器的训练过程中,船名字符为正样本,正样本包括数字字符和汉字字符,图像中除船名以外的图像作为负样本。其中正样本5000张,负样本8000张。船名检测测试实验中,测试图像共计500张,其中昼间图像300张,夜间图像200张,共计4000个船名字符,其中汉字字符1525个,数字2457个。
经测试得出,本方法正确检测的昼间图片282张,准确率高达93.6%;正确检测的夜间图片170张,准确率达85.5%,总准确率为90.4%。经分析发现,被测船舶中数字字符识别率较高,汉字字符检测准确率较低,这导致了船名中很多汉字漏检测,因此出现10%左右的船名仅能正确检测部分字符。
4.结论
本研究提出一种基于计算机视觉的船名检测方法,结合连通域分析和笔画宽度变换,通过级联分类器确定最终文字区域。通过实验和分析,验证了该方法的可行性。实验结果表明,该方法在昼间和夜间均能实现船名精准检测。本文对于船名字符检测的研究在一定程度上弥补了船名检测在计算机视觉方面的空白,同时本研究也节省了人工查看视频获取船名所花费的大量人力成本。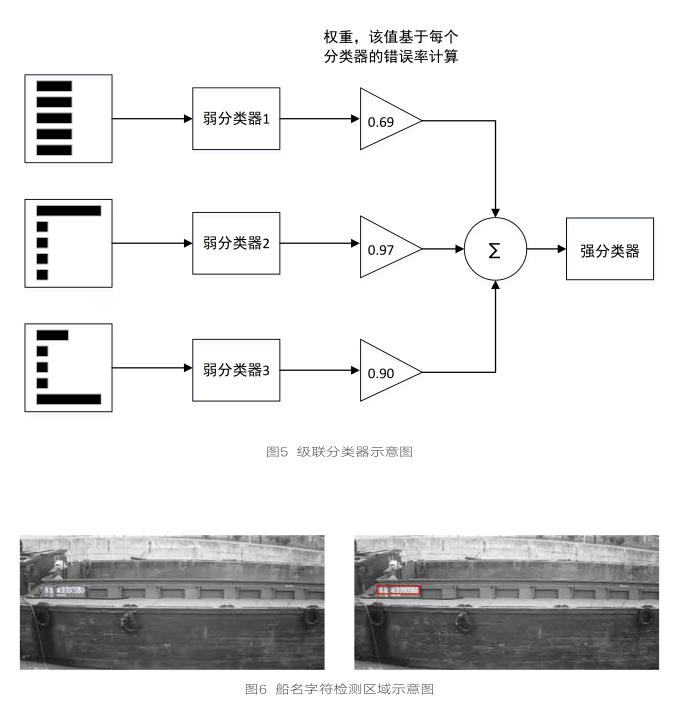
参考文献:
[1]崔晶,贾冬青,陈玉芳.基于无线局域网中船舶自动识别通信平台设计[J].舰船科学技术,2016(10):100-102.
[2]何春燕,余晓玫,高飞.面向识别的船舶目标雷达回波技术研究[J].舰船科学技术,2017(22):103-105.
[3]郑艳.基于有源RFID技术的船舶识别与控制终端系统研究[J].舰船科学技术,2017(16): 142-144.
[4]潘美莲.船舶自动识别系统中的计算机视觉技术应用[J].舰船科学技术,2017(6):99-101.
[5]周勇.基于计算机视觉技术的内河船舶智能监控系统研究与实现[D].上海交通大学,2016.
[6]杨高星.基于计算机视觉的船舶跟踪及类型识别研究[D].大连海事大学,2017.
[7]李芸.视频监测在船舶流量检测中的应用[J].中国航海,2012,35(3):35-39.
[8]Aldenize Xavier,Carlos Eduardo Guerra,André Andrade .Fracture analysis in borehole acoustic images using mathematical morphology[J].Journal of Geophysics and Engineering,2015(3).
