一种适应凹障碍检测的激光雷达布局研究
2018-11-13张英,李擎,张昊
张 英,李 擎,张 昊
(北京信息科技大学 高动态导航技术北京市重点实验室,北京 100101)
0 引 言
无人车行驶过程中对其周边的障碍物检测是环境感知技术研究领域的重要组成部分。通过对非结构化环境下障碍感知技术的研究可以促使自主车辆逐步从简单封闭道路走进真实、复杂的交通环境。
此前,人们对结构化道路环境下的障碍物检测进行了不少的研究,如基于光流的方法[1]、基于立体视觉的方法[2]、基于激光雷达的方法[3-5]。但是结构化道路检测的障碍物主要为行人、车辆、建筑物等,而非结构化环境则有很大的不同[6]。非结构化环境的障碍物种类繁多,包括凸起石头、低于地面的坑和沟、水塘及树木等障碍物。而针对野外的非结构化障碍物检测,国内北京大学的邵海燕[7]利用摄像机,基于线结构光,对水体、凹凸障碍物特征进行分析。但是该方法在阴雨天、雾霾[8]等天气下无法高准确率的检测障碍物,因此,本文基于16线三维激光雷达,设计新的激光雷达安装方式,针对凹障碍物检测,分析其结构特征,实现不同天气下的高精度障碍物识别。
1 激光雷达预处理
激光雷达获取的点云数据含有大量噪声,本文采用基于坡度变化的滤波算法对获取的点云数据进行处理。该滤波算法是利用坡度变化确定最优滤波函数。假设A为获取的原始点云数据集,DEM为地面点集,d是点间距离,则满足滤波函数的点就是DEM的元素:

若给定点pi,找不到临近点pj,使其满足下式,则pi划分为地面点:

该滤波方法是通过两点间的高差值大小来决定是否接受选择点。两点间的阈值定义为两点间距离的函数Δhmax(d)。一般认为该函数为非递减的,确定函数的方法主要有合成函数。假设地形坡度不超过a%,且观测值无误差,则滤波函数为:

实际上观测值有误差,因此添加置信区间,并假定允许具有标准偏差的地面点被拒绝,滤波函数为:

式中,Δhmax(d)的求取应选择合适的区域作为训练数据子集。
基于坡度的滤波算法具有计算简单、适应性强等特点,但需要预先知道地形坡度和确定所开窗口的大小,所选点必须同其他所有点进行比较,以确定该点是否为地面点。
2 新的激光雷达布局方法
激光雷达的传统安装方法是直立安装在车辆的顶部位置,致使车辆周围有一个很大的视觉盲区。该盲区若在野外环境下,如在存在沟坑和狭窄的道路情况行驶,则盲区对于车辆的安全存在巨大的隐患。传统的激光雷达直立安装及盲区如图1所示。

图1 激光雷达直立安装Fig.1 Erect installation of laser radar
盲区的边缘到车辆的距离B可表示为:

式中:W为激光雷达到车辆边界的距离;H1为雷达的高度;H2为车辆的高度。红色区域代表车辆前方的盲区。
此外,随着扫描距离的增加,相邻扫描线间也变得更加稀疏,以16线激光雷达Veldyne HDL-16为例,雷达距地面的高度大约1.5 m,其负角度的激光示意图如图2所示。
图3中黑色的三个圆从里到外分别为-9°,-7°和-5°激光束的扫描,红色的三个圆为一个周期后激光束的扫描,黄色、黑色、绿色实线分别为两周期内-9°,-7°和-5°激光束的实际扫描曲线。

图2 负角度的8束激光示意图Fig.2 8-beam laser schematic diagram of negative angle

图3 多角度激光束多周期示意图Fig.3 Multi-period diagram of multi-angle laser beam
假设车辆在10 m/s的速度,10 Hz的雷达频率下,一个周期内汽车行驶的距离为1 m。分析可得,雷达可探测范围从车辆的行驶方向的正前方向两侧递减,其中车辆行驶方向的正左和正右方盲区最大,值为雷达不同角度激光束之间的距离差值,雷达正前方可测量的最小差值为0.007 m,最大差值为1 m(车辆一个周期内行驶的距离)。1 m的盲区对车辆的行驶安全是致命的,所以直立的布局方式的盲区弊端明显,需要进行改进。
根据图1的激光雷达安装方法,无人车在沟坑、狭窄道路行驶时存在较大的传感器盲区,影响无人车的安全行驶。针对无人车行驶的安全问题设计的新安装方式解决了上述缺点,如图4所示。

图4 新的雷达安装方法示意图Fig.4 Schematic diagram of new radar installation method
在车顶的左右两边对称位置分别侧立倾斜安装一个16线激光雷达,探测范围决定于倾斜的角度;前侧安装一个单线激光雷达。安装时需确保上方两个雷达间没有相互直射的激光束,以免对雷达造成伤害。
从图5可以看到盲区的范围大大的减小,前方的重叠区域被两个甚至三个激光雷达探测到,加强了对前方未知区域的理解力。在这种安装方式下,凹障碍的几何特征更加容易被识别,检测到的凹障碍可靠性增大。
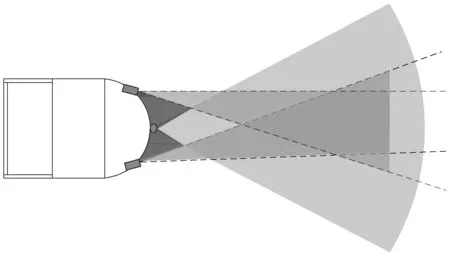
图5 探测范围示意图(红色部分为盲区)Fig.5 Schematic diagram of detection area(the red part is blind area)
3 障碍物检测及实验
多线激光雷达每一帧的探测数据量非常庞大,但地面上的测量点仍然是稀疏的,特别是距离雷达较远的地区。因此,对凹障碍的检测,通常难以获得详尽的测量数据。
凹障碍检测如图6所示。其中L代表障碍的宽度,H代表激光雷达到地面的高度,D表示雷达到障碍的距离。凹障碍的检测中广泛应用的两点:当出现凹障碍时,相邻扫描点的距离会明显变大,反映在图中为;且同时总存在着高度值低于周围点的点,如p2,p3低于p1,p4。这是凹障碍的主要几何特征。

图6 典型凹障碍的几何特征Fig.6 Geometric characteristics of the typical concave obstacle
用传统直立方式安装激光雷达的扫描线示意图如图7a)所示,障碍物位置上的扫描点属于不同的扫描线,相邻两条扫描线间的角度决定于雷达的固有参数。而用本文提出的安装方式的扫描示意图见图7b)。扫描点来自于同一扫描线,这样安装的好处是在感兴趣区域(ROI)所获得的扫描点更加密集,每两个点之间的角度是固定的。
基于这一特征拟采用的凹障碍检测方法步骤为:
1)将点云投影到极坐标栅格;
2)在每一个水平角度上,以雷达为中心自内向外沿射线遍历点云,并从第二个点开始将每个点与前一点构成点对;
3)对每组点计算高度变化量和水平距离,并分别与高度阈值和宽度阈值进行比较,若均低于阈值,则判定该点对两点之间的区域为凹障碍。

图7 两种安装方式的扫描线示意图Fig.7 Schematic diagrams of scan line for two installation modes
实验时,雷达高度H=1.2 m,凹坑(见图8)大小S=1×0.5m2,分别在距离凹坑3 m,6 m位置进行激光雷达扫描。从图9,图10中可以看到,两种安装方式都可以检测出凹坑的位置,大体形状。不过,由于直立安装方式返回的扫描点较少,与真实的凹坑形状有出入,而本文安装方式的扫描就可以很好地体现出凹坑的具体形状、大小。从图11、图12可以看出,在凹坑前6 m的位置时,由于激光雷达扫描距离越远,两条扫描线之间的距离越大,此时凹坑位于两条扫描线中间,故无法检测到凹坑位置。本文的安装方法下,虽然距离变大,扫描到凹坑的点数量减少,但仍可以看出凹坑形状,从而有利于无人车提前做好避障准备。

图8 野外环境下的凹坑Fig.8 Pits in the field
4 结 论
凹型障碍的识别一直是无人车障碍物检测的难点,与传统安装方法相比,本文设计新的激光雷达识别方法可以有效地缩小无人车激光雷达的扫描盲区,并且能更早地发现无人车前方的凹障碍,做到及时避障,有利于车辆的安全行驶。

图9 直立安装方式扫描线(3 m)Fig.9 Scan line of vertical installation mode(3 m)

图10 本文安装方式扫描线(3 m)Fig.10 Scan line of the proposed installation mode(3 m)
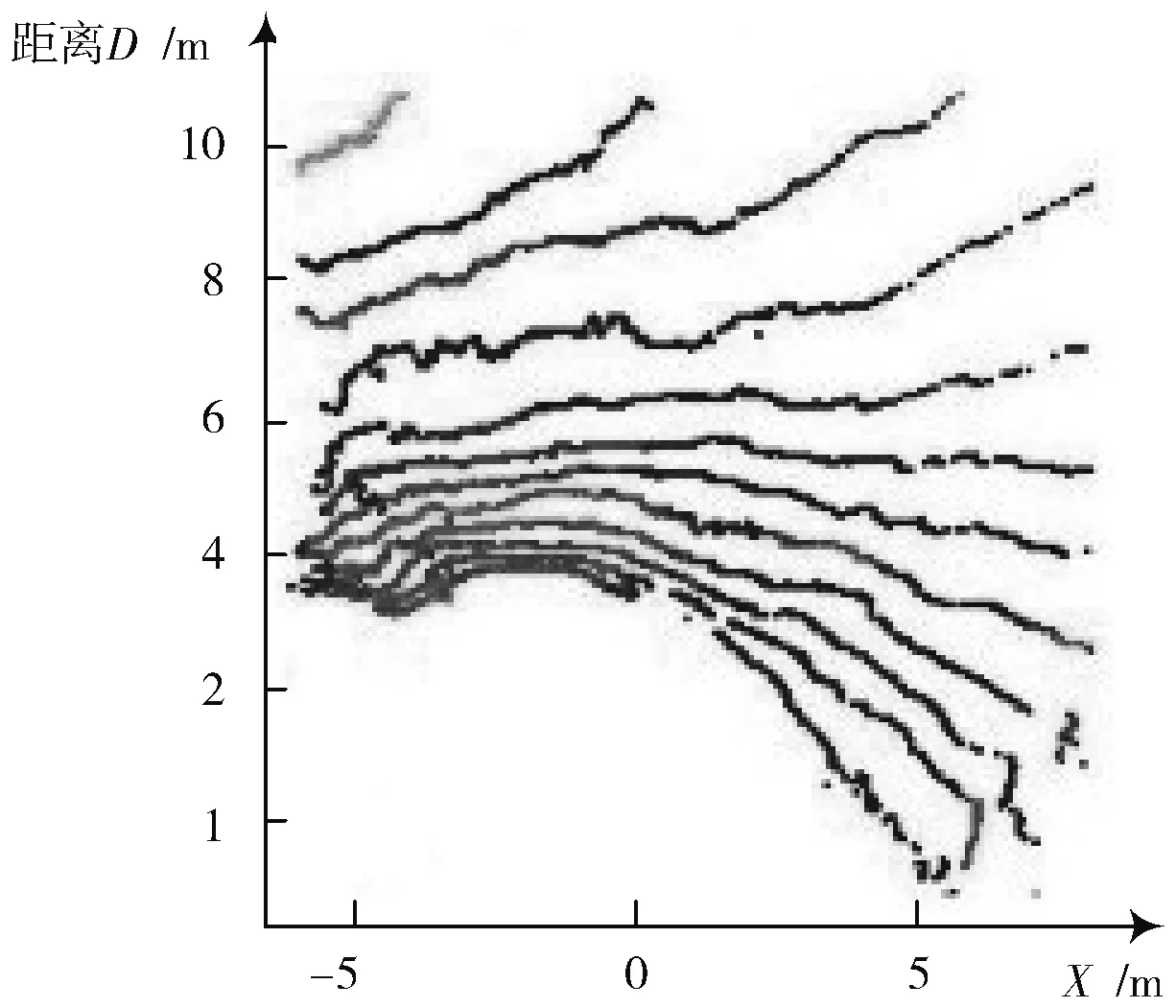
图11 直立安装方式扫描线(6 m)Fig.11 Scan line of vertical installation mode(6 m)
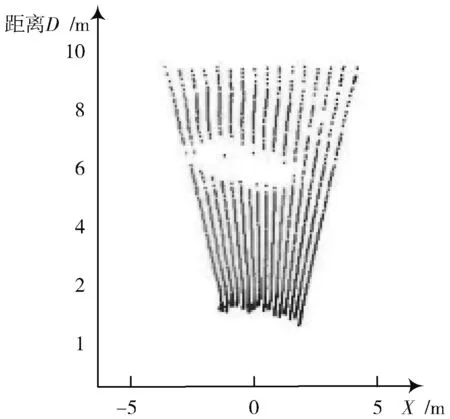
图12 本文安装方式扫描线(6 m)Fig.12 Scan line of proposed installation mode(6 m)
