基于车桥耦合振动信号和扩展卡尔曼滤波的桥梁结构损伤识别
2018-11-09黄进鹏黄杰忠宋固全
黄进鹏, 黄杰忠, 张 纯, 宋固全
(1. 南昌大学 建筑工程学院, 江西 南昌 330031; 2. 大连理工大学 建设工程学部, 辽宁 大连 116024)
桥梁结构在车辆荷载、风荷载、温度应力或环境灾害等因素的影响下,结构出现损伤或性能退化是不可避免的。损伤不仅会降低桥梁的安全性、耐久性及影响桥梁的正常通行,甚至可能导致重大安全事故。在不影响桥梁正常运营的前提下,利用行驶车辆作用下的车桥耦合信号进行桥梁结构的损伤识别和健康监测是较为符合实用性要求的选择。因此,对基于车桥耦合振动信号的损伤识别方法进行研究具有重要意义。
在基于模型的时域损伤识别方法中,最常见的方法是灵敏度法[1~3]。由于需要利用结构全部的时程响应及相应的灵敏度进行结构损伤反演,这类方法存在计算量大、不能在线使用等问题。与之相比,目前卡尔曼滤波类的识别算法(如扩展卡尔曼滤波、无迹卡尔曼滤波等)正受到越来越多的关注[4~7]。卡尔曼滤波类算法相当于一种利用当前观测值不断进行模型修正的递推算法,可以得到识别参数的最优(或次优)估计,具有良好的鲁棒性。更重要的是行驶的车辆会改变耦合系统的质量分布,并导致时变的系统动力学方程;而用于非线性系统参数识别的扩展卡尔曼滤波(Extended Kalman Filter,EKF)方法从其基本理论上就保证了可以适用于时变系统,这对于基于车桥耦合振动的结构损伤识别算法来说至关重要。与此同时,由于EKF损伤识别算法也会面临反问题求解的不适定性,引入l1正则化技术[8,9]可有效改善不适定性,达到更好的损伤识别效果。
本文利用伪测量方法在EKF的递推步中加入l1正则化过程,提出了基于车桥耦合振动信号的扩展卡尔曼滤波损伤识别算法。数值模拟表明:对于不同的量测噪声和模型参数,本文方法均能有效控制噪声影响并准确识别桥梁结构损伤。
1 基本理论
1.1 车桥耦合振动理论
以最为常见的简支梁桥为代表,车辆采用半车模型模拟,建立如图1所示车桥耦合模型。设梁中心线的动挠度为u(x,t),车辆系统的广义坐标分别为z1,z2,zb,θb;前后轮的位置分别为x1,x2,与桥梁接触点处桥梁相应的节点位移分别为zof,zor;车辆通过桥梁的速度为v,并假定车辆在桥梁上行驶时不脱离开梁体。
设桥梁的位移响应为:
(1)
式中:φi设为桥梁结构第i阶质量归一化模态;qi为广义模态坐标;N为模态截断的阶数。根据D’Alembert原理可得到车桥耦合系统的动力学方程[10]为:

(2)

(3)
式中:q为广义位移向量;M,C,K,F分别为结构的质量、阻尼、刚度矩阵及荷载向量,其具体形式分别为:
式中:
M22=diag(mwf,mwr,mhb,Ihp);
C11=diag(2ξ1ω1,2ξ2ω2,…,2ξNωN);
mhb,Ihp分别为车体质量、车体转动惯量;mwf,mwr分别为前、后悬架与轮胎质量之和;ksf,ksr分别为前、后悬架弹簧刚度;Csf,Csr分别为前、后悬架的阻尼系数;ktf,ktr分别为前、后轮胎的等效刚度;Ctf,Ctr分别为前、后轮胎的阻尼系数;a,b分别为车辆前、后轴到车辆重心的距离;ωi和ξi分别为桥梁结构第i阶频率和模态阻尼比;Φ1=[φ1(x1)φ2(x1) …φN(x1)]T,Φ2=[φ1(x2)φ2(x2) …φN(x2))T,当车轮位置不在梁桥节点上时,桥梁相应位置的模态值φi(x1)和φi(x2)利用节点数据插值得到。

图1 车桥耦合系统
1.2 扩展卡尔曼滤波损伤识别算法
利用EKF算法进行桥梁结构损伤识别,首先需要建立结构的基准模型,并引入描述结构刚度变化的损伤参数;通过不断获得的观测值,持续更新结构状态及修正结构参数的估计值。这实际上是一种结构运动状态和结构参数联合识别的过程。算法中需要在待识别的系统运动状态变量中加入单元损伤参数来指示损伤,因此,本文算法采用的系统状态向量定义为:
(4)
根据车桥耦合系统动力学方程和状态向量定义,EKF算法中离散形式的状态方程和观测方程可表示为:

(5)
z(x,t+Δt)=h(θ(t+Δt),x,t+Δt)+V
(6)

(7)
由于状态变量中的结构材料参数(损伤参数)与结构响应之间存在非线性关系,因此,状态方程和观测方程均是非线性的。EKF算法中,在将非线性的状态方程、观测方程线性化时,需要计算状态转换矩阵A和观测矩阵H:
(8)
(9)
不考虑结构损伤对结构质量的影响,在A和H矩阵中频率ωi和振型φi关于损伤参数的灵敏度[11]可以表示为:
(10)
由于结构损伤一般是局部的,整体结构中仅有少数单元存在损伤,即损伤参数的分布具有稀疏性。l1正则化技术能够在改善反问题求解不适定性的同时,有效保留损伤识别结果的稀疏性特征。故本文将EKF与l1范数正则化技术相结合,用于提高损伤识别算法的性能。考虑l1范数正则化过程的EKF损伤识别算法实质上等效为一个带约束的最优化问题[12]:

(11)
为在卡尔曼滤波框架内求解问题(11),本文在每一个EKF递推步中,利用伪测量算法[13],通过虚拟测量方程柔性地实现l1范数约束条件。伪测量过程的状态方程与虚拟量测方程分别为:
(12)

综上,基于l1范数正则化的EKF损伤识别算法流程如下所示:
(1)预测更新
(13)
(14)
(2)量测更新
(15)
(16)
(17)
(3)伪测量过程

(18)
(19)
(20)
(21)

重复式(13)~(21)的步骤即可实现EKF算法的递推,最终完成损伤参数的估计。伪测量过程中协方差Rε的大小与约束参数ε正相关,可采用L曲线法[14]确定其大小。此外,需要强调的是,算法流程中(13)式采用了通解的表达形式,但具体计算时无需计算积分,可以采用通常的动力学数值计算方法,如Runge-Kutta法、Newmark-β法等。本文采用精细积分法。
2 数值算例
2.1 参数介绍
算例采用图1中所示的车桥耦合系统,梁的参数如下:材料弹性模量和密度分别为31 GPa、2400 kg/m3,梁长15 m,截面尺寸为12×0.8 m2,将梁等分为10个单元。半车车辆模型参数如下:车体质量mhb=2×104kg,车体转动惯量Ihp=6×104m4,前、后悬架与轮胎质量之和分别为mwf=340 kg,mwr=660 kg,前、后悬架弹簧刚度分别为kSf=1×106N/m,ksr=2×106N/m,前、后悬架的阻尼系数CSf=1.7×105N·s/m,Csr=1.4×104N·s/m,前、后轮胎的等效刚度为ktf=0.85×106N/m,ktr=2×106N/m,前、后轮胎的阻尼系数Ctf=Ctr=0,车辆前、后轴到车辆重心的距离分别为a=2.5 m,b=0.5 m,车辆通过简支梁的速度为v=15 m/s,位移响应的记录是从车辆的后轮刚经过简支梁左端开始,前轮刚到达右端时结束,总时长0.8 s,并假设车辆在桥梁上行驶时不脱离开梁体。单元划分情况如图2所示,提取2~10号节点的竖向位移响应作为观测值,采样频率1000 Hz,同时按下式加入高斯白噪声模拟观测噪声:

图2 简支梁模型/m
(21)
式中:高斯白噪声swgn(t)的信噪比定义为SNR=10×lg(SP/NP),其中SP和NP分别为信号和噪声的强度值。
表1列出了单损伤和多损伤两种损伤工况,用于模拟不同的损伤工况。

表1 不同损伤工况
2.2 单损伤工况识别结果
图3给出了信噪比分别为30,25,20 dB三种情况下梁的损伤识别结果。从图中看出,尽管车桥耦合信号所含噪声等级在不断加大,本文方法依然能够保持较高的识别精度。即使当噪声级别达到20 dB时,单元刚度识别值的最大相对误差为2.41%,并且在无损单元处没有发生误判现象。图4给出了在不同信噪比时,5号单元损伤参数的递推收敛过程。在不同噪声级别下,损伤参数均能快速收敛至实际损伤值附近;噪声较小时,损伤参数收敛速度相对更快。图5为当信噪比为20 dB时6号节点的位移信号跟踪曲线,可以看出车桥耦合信号能被算法很好地跟踪,且体现出良好的滤波效果。

图3 不同噪声情况下桥梁结构损伤识别结果

图4 桥梁损伤单元损伤参数收敛曲线

图5 节点6的信号跟踪曲线(20 dB噪声)
30 dB噪声情况下,不同车辆行驶速度对于结构损伤识别结果的影响如图6所示。从图中可以看出,在不同的车速下本文方法都能够准确识别出损伤,损伤识别结果差别很小,这说明算法对于车速不敏感。图7给出了车重对识别结果的影响。重载车辆情况下识别出的结果略优于轻载车重的情况,但刚度识别结果的相对误差都小于1.6%,可见桥梁结构损伤识别的结果对于车重的变化同样不敏感。
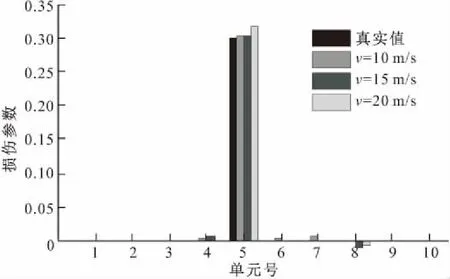
图6 不同车速下桥梁结构损伤识别结果(30 dB噪声)

图7 不同车重下桥梁结构损伤识别结果(30 dB噪声)
2.3 多损伤工况识别结果
图8给出了多损工况下,利用车桥耦合振动信号识别得到的桥梁损伤结果。随着噪声级别的提高,损伤识别精度将相应降低,但始终能有效抑制噪声对无损单元的干扰,正确指示结构损伤。图9给出了在噪声25 dB下损伤参数的收敛曲线,从图中可以发现,三个损伤参数都能够在较短时间内收敛到真实值附近并保持稳定。由图10可以看出,在多损伤工况下,即使噪声为20 dB,信号依然能够有效跟踪,表明本文方法具有良好的抗噪声滤波能力和信号跟踪效果。

图8 不同噪声情况下桥梁结构损伤参数识别结果
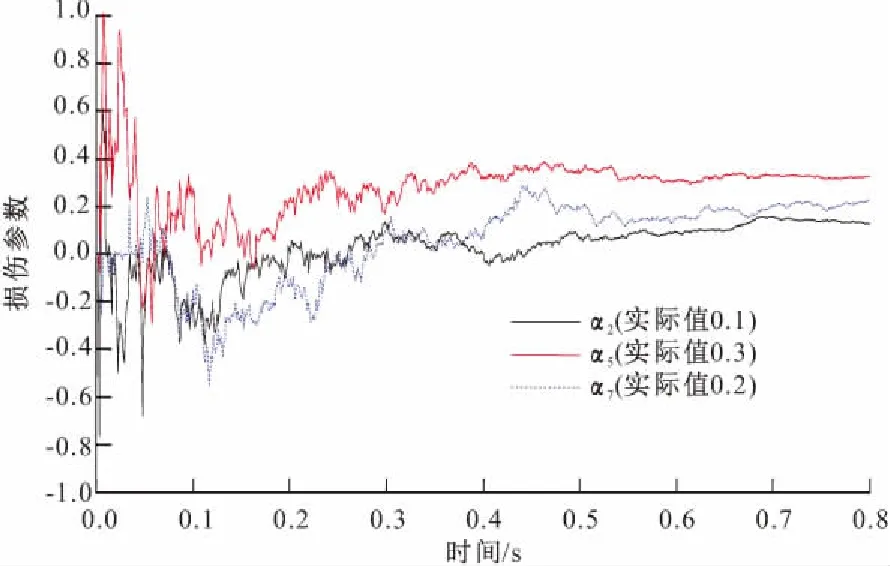
图9 多损伤工况的损伤参数收敛曲线(25 dB噪声)
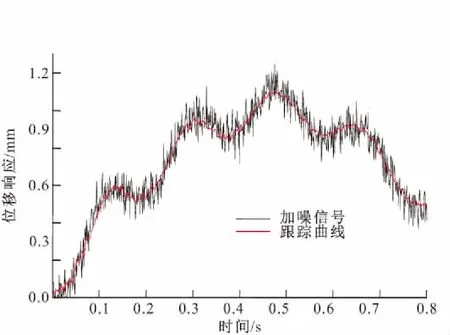
图10 节点6的振动信号跟踪曲线(20 dB噪声)
从以上数值算例中可以看出,无论针对单损伤还是多处损伤,采用基于半车模型的车桥耦合振动信号,利用结合l1范数的扩展卡尔曼滤波算法进行损伤识别,都可以较好地识别出损伤位置与程度。
3 结 语
本文基于移动车辆激励下的桥梁振动信号,提出了一种结合l1范数正则化过程的EKF桥梁结构损伤识别方法。把车辆模型简化为半车模型,推导了半车模型对应的车桥耦合动力学方程,将其用于EKF算法的状态递推过程,并利用不断获得的结构响应信号不断更新结构状态与参数,最终准确识别出结构的损伤。数值算例表明本文方法能有效抑制噪声干扰,损伤参数能迅速收敛至真值附近,且对于车速、车重等因素的影响不敏感。