粒子群分数阶PIλDμ在压电叠堆控制中的应用
2018-11-07付云博顾家闻李家伟徐鑫
付云博 顾家闻 李家伟 徐鑫

摘要:为了克服压电叠堆的迟滞特性,实现压电叠堆的精确控制,建立了压电叠堆控制系统。对该系统所用到的粒子群、分数阶微积分等算法进行了研究。首先,搭建了采集压电叠堆位移的硬件系统,并对含有噪声的位移数据进行了滤波处理。然后,利用分数阶微积分描述了压电叠堆输出力与驱动电压之间的关系,以此构建了压电叠堆的分数阶模型。最后,利用粒子群算法整定分数阶PIλDμ控制器控制参数对压电叠堆输出位移进行控制。粒子群分数阶PIλDμ控制下系统的输出稳定,很好地跟随了给定,最大误差为实际输出的1.74%要优于粒子群整数阶PID的2.95%。较整数阶模型而言,分数阶模型能够更加准确描述压电叠堆的迟滞特性,提高了建模精度,而结合了粒子群算法的分数阶PIλDμ较粒子群整数阶PID也进一步提高了控制精度。
关键词:分数阶模型;分数阶PIλDμ;压电叠堆;粒子群优化算法
中图分类号:TP275 文献标识码:A 文章编号:1009-3044(2018)21-0263-03
Abstract: In order to overcome the hysteresis characteristics of piezoelectric stack and control piezoelectric stack more accurately, a control system is established and corresponding algorithms such as particle swarm optimization,fractional order differential and integral calculus is investigated. First, a hardware platform was set up to collect displacement of piezoelectric stack and wavelet algorithm was used to removal noise. Then fractional order equation was used to correct linearity of output force and drive voltage of piezoelectric stack, combined with elastic damping model between output force and output displacement of piezoelectric stack, a fractional order model of piezoelectric stack was obtained. Finally, particle swarm optimization was used to set the parameters of fractional order PIλDμ to control displacement of piezoelectric stack. Under the controlling of particle swarm optimization fractional order PIλDμ, output displacement of piezoelectric stack had a good follow with input. Maximum error of control result of PSO-FOPID is 1.74% of the actual output, which is better than control result of particle swarm optimization integral order PID:2.95%. Fractional order model can describe hysteresis characteristics of piezoelectric stack more accurately than integral order model, which improved modeling precision. And particle swarm optimization fractional order PIλDμ can provide higher control accuracy than particle swarm optimization integral order PID to piezoelectric stack.
Key words: Fractional order model; Fractional order PIλDμ; Piezoelectric stack; Particle swarm optimization
精密定位技术当前需求越来越广,也越来越高,比如生物细胞手术、高密度集成电路检测、人体药物注射泵、光导光纤制造、超精密加工制造等的分辨率需求都是微米级或纳米级的。压电叠堆作为一种高性能的压电陶瓷微位移执行器,其工作原理就是利用了压电陶瓷的逆压电效应,将电能转换成机械能,它响应时间短、输出应频率高、刚度高、位移精度高,可以实现很多高频、高精度的定位需求 [1]。尽管压电叠堆具有上述优点,但是通过一定叠合工艺制作合成的壓电材料具有的迟滞、蠕变等非线性特征,这不利于精密定位 [2]。
鉴于压电叠堆的优良性能,国内外很多机构和个人对压电叠堆展开了研究。Miri, N. [3]等人利用Kelvin-Voigt, Maxwell-Slip, Duhem, Preisach等模型为压电执行器建模,并对比它们的计算量和建模精度;Quoc-Hung Nguyen[4]利用压电叠堆驱动喷射点泵,并利用PID进行闭环控制。国内的袁刚[5]等人将Bouc-Wen算子应用于压电式快速反射镜的建模与控制,将线性度提高到2.3%;李朋志[6]等人迭代学习控制对压电叠堆进行控制取得了不错的结果;王耿[7]等对应变式微型精密压电驱动器进行一体化设计并利用PID对其控制。
分数阶微积分作为整数阶微积分的补充和延伸近年来得到了长足的发展,尤其是在控制领域中,利用分数阶微积分建模可以更加准确、细腻的描述系统的动态特性,有效提高动态系统的设计、控制能力 [8-10]。本文将利用分数阶微积分为压电叠堆建立数学模型,并结合粒子群算法为其设计分数阶PIλDμ控制器。
1分数阶微积分
1.1 分数阶微积分定义
3 压电叠堆的粒子群分数阶PIλDμ控制
3.1 分数阶PIλDμ
Step 1:设置粒子群向量[xi=(kp,ki,kd,λ,μ)],根据控制参数对系统影响对粒子群位置向量门限、速度向量门限、最大迭代次数等进行初始化设置;
Step 2:更新粒子群位置和速度;
Step 3:求出粒子群适应值[J(kp,ki,kd,λ,μ)];
Step 4:分数阶PIλDμ控制器控制参数更新,利用式(13)求得的适应值[J(kp,ki,kd,λ,μ)]如其小于ISE历史最优值,则将个体ISE历史最优控制器参数替换为当前控制器参数[(kp,ki,kd,λ,μ)],并将ISE历史最优值替换为当前控制器参数的适应值;
Step 5:如果全局最优位置适应值优化到合理范围,则结束运算。
4 实验
4.1 模型参数辨识实验
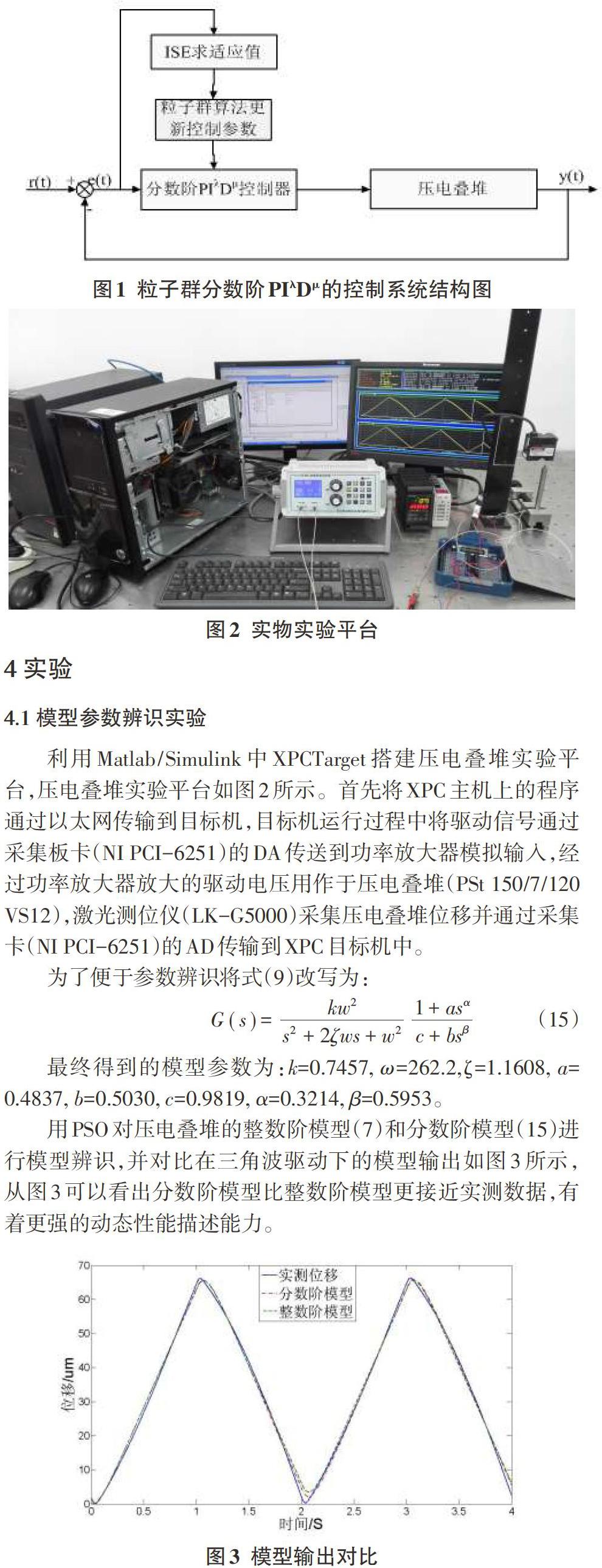
利用Matlab/Simulink中XPCTarget搭建压电叠堆实验平台,压电叠堆实验平台如图2所示。首先将XPC主机上的程序通过以太网传输到目标机,目标机运行过程中将驱动信号通过采集板卡(NI PCI-6251)的DA传送到功率放大器模拟输入,经过功率放大器放大的驱动电压用作于压电叠堆(PSt 150/7/120 VS12),激光测位仪(LK-G5000)采集压电叠堆位移并通过采集卡(NI PCI-6251)的AD传输到XPC目标机中。
4.2 压电叠堆位移控制实验
首先在仿真实验中辨识被控对象为式(11)所确定的压电叠堆分数阶模型,然后实验利用粒子群算法整定分数阶PIλDμ控制器以得到控制参数。在实物实验中,将整定参数的分数阶PIλDμ控制器应用到压电叠堆位移控制实验平台中,对分数阶模型和控制算法进行验证。为了对比分析粒子群分数阶PIλDμ控制器的控制性能,还利用粒子群整数阶PID控制系统对压电叠堆进行控制。由图4和图5可以看出粒子群分数阶PIλDμ控制下系统的最大误差为实际输出的1.74%要优于粒子群整数阶PID的2.95%。
5 结论
压电叠堆作为一种高性能的压电陶瓷微执行器,通过逆压电效应,它具有响应快、刚度强、精度高、输出力大等优点。但是由于其迟滞非线性特点使得它比较难以建模、控制。分数阶微积分无论是对积分的定义还是微分的定义都包含了对被运算函数自初始时刻历史数据的应用,这种记忆特性将对压电材料的迟滞建模提供很大帮助,使得分数阶对系统的描述和控制较整数阶更为准确细腻。
本文利用分数阶微积分为压电叠堆建立数学模型,并用粒子群分数阶PIλDμ控制压电叠堆,实现压电叠堆的闭环控制。在与压电叠堆整数阶模型的对比中可以看出分数阶模型更加接近实际输出,从控制结果也可以看出粒子群分数阶PIλDμ控制下压电叠堆的输出位移比较稳定,最大误差为实际输出的1.74%,要优于粒子群整数阶PID的2.95%。
参考文献:
[1] 杨玥,郑素霞,许忠斌,等.微纳米技术在工业装备中的应用研究进展[J].轻工机械,2011, 29(4): 117-120.
[2] Research Department, Micromachine Center[C]. The Research Reports under the 7th Micromachine Technology Research Grant. 2010:1240-1253.
[3] Miri, N., et al.. A comparative study of different physics-based approaches to modelling of piezoelectric actuators[C]. IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM),Wollongong, Australia.2013.
[4] Nguyen Q H, Jeon J C, Choi S B. Optimal design of a jetting dispenser actuated by a dual piezoactuator[J]. Proceedings of SPIE - The International Society for Optical Engineering, 2014, 9057(15):4177-4180.
[5] 袁刚等. 压电式快速控制反射镜的迟滞特性及线性化[J]. 光学精密工程,2015,23(6):1650-1656.
[6] 李朋志,等.压电驱动器的开闭环迭代学习控制[J].光学精密工程,2014, 22(2): 414-419.
[7] 王耿等.应变式微型精密压电驱动器的一体化设计及其PID控制[J].光学精密工程,2013, 21(3): 709-716.
[8] Liu Y, Xue D, Chen Z, et al. Fractional order model identification for Electro-Active smart actuator[C].Intelligent Control and Automation (WCICA), 2014 11th World Congress on. IEEE, 2014:3192 – 3195.
[9] 孟 丽.分数阶控制器设计与实现方法研究[D].东北大学,2012.
[10] Yu W, Luo Y, Chen Y Q, et al. Frequency domain modelling and control of fractional-order system for permanent magnet synchronous motor velocity servo system[J]. Iet Control Theory & Applications, 2015.
[11] 薛定宇,趙春娜.分数阶系统的分数阶PID控制器设计[J]. 控制理论与应用,2007, 24(5): 771-776.
[12] Podlubny I. Fractional-order systems and PIλDμ-controllers[J]. IEEE Trans.automat.contr, 1999, 64(8):1287-1300.
【通联编辑:梁书】
