灭茬免耕大豆播种机的设计与试验
2018-11-06王超群曹成茂廖移山宣林森
王超群,曹成茂,2*,秦 宽,廖移山,宣林森
(1.安徽农业大学工学院,合肥 230036;2.农业部南方主要农作物生产技术与装备重点实验室,合肥 230036;3.宿州市科鸣农业机械有限公司,安徽 宿州 234113)
中国北方地区以种植小麦、大豆、玉米为主,小麦基本实现机器收获,机收小麦后在全秸秆覆盖地播种大豆较困难。传统种植方式焚烧秸秆、深耕、耙地、播种,费时费力,污染空气。在全国禁烧秸秆背景下,急需设计可一次性完成灭茬、粉碎、播种的保护性耕作机械。
免耕播种机是保护性耕作机具[1],国内已对灭茬免耕播种机开展大量研究[2]。刘忠军等设计茬地免耕玉米播种机[3],刘艳芬等设计玉米垄作免耕机,采用破茬盘、切拨机构防止秸秆堵塞播种机,灭茬粉碎效果差、晾籽率高[4];李杞超等设计2BZJ-12型大豆窄行平作精密播种机[5],吴峰等设计秸秆粉碎后抛式免耕播种机[6],顾峰玮等研制麦茬全秸秆覆盖地花生免耕播种机[7]。为解决传统免耕播种在全秸秆覆盖地作业存在堵塞架种、晾种等问题,本文设计灭茬免耕大豆播种机,以降低晾籽率、避免秸秆堵塞。
1 整机结构和工作原理
1.1 整机结构
灭茬免耕大豆播种机,包括悬架、罩壳、限位轮、仿形地轮、灭茬刀轴、动刀、定刀、机架、开沟器、种箱、排种器等组成。
如图1所示,罩壳左右两侧对称安装仿形地轮,左右两个限位轮安装在罩壳前方,机架位于机罩壳后上方,种箱安装在机架,排种器位于种箱底部,开沟器竖管和机架固定,灭茬刀轴位于开沟器前方,动刀座在灭茬刀轴,定刀座焊接在灭茬刀轴正上方罩壳,动刀、定刀分别安装于动刀座、定刀座。
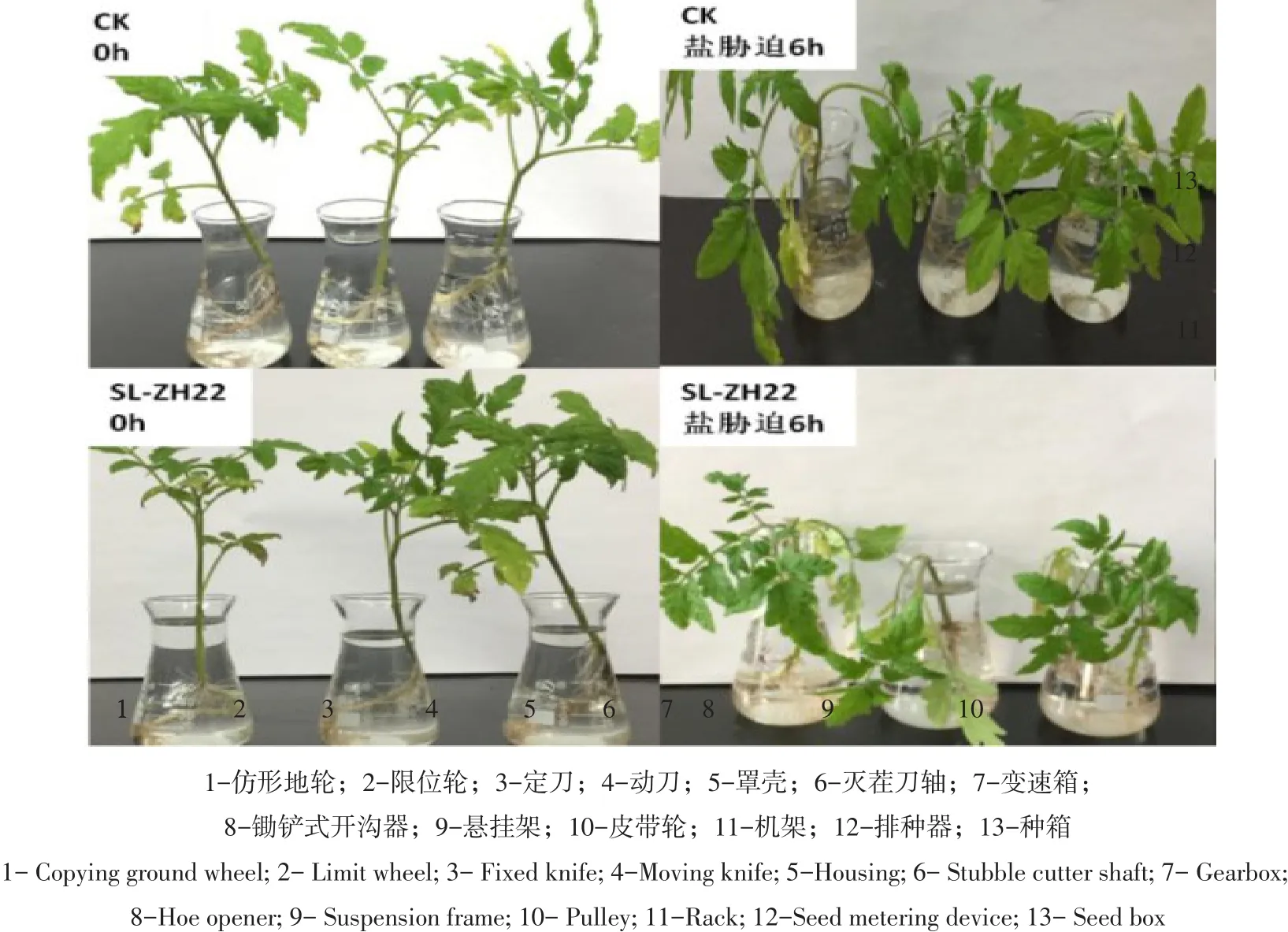
图1 整机结构Fig.1 Schematic of the whole machine structure
1.2 工作原理
拖拉机以1.11~1.67 m·s-1速度前进,拖拉机动力输出轴通过变速箱和皮带轮将动力传递给灭茬刀轴,灭茬刀轴以1 800~2 000 r·min-1速度反转,动刀随灭茬刀轴作高速反转运动,秸秆切断后抛起与灭茬刀轴正上方定刀产生剪切,使秸秆粉碎向后抛洒,开沟器将种子播在无秸秆区域,实现洁区播种。开沟器距灭茬刀轴轴心横向距离略大于动刀最大回转半径,在罩壳约束下,粉碎后秸秆和碎土沿罩壳形状斜向下均匀抛洒在机具后方。播种大豆时左侧仿形地轮带动外槽轮式排种器实现7行播种。
2 关键部件设计
2.1 灭茬粉碎装置设计
灭茬粉碎装置由灭茬刀轴、动刀座、动刀、定刀座、定刀等构成。动刀座焊接在灭茬刀轴上,每两把动刀与灭茬刀轴上动刀座通过销钉连接。定刀通过固定螺栓和定刀座固定,定刀座焊接于灭茬刀轴正方罩壳横板,定刀距灭茬刀轴中心距离与灭茬动刀最大回转半径相同,工作时,每对动刀Y型开口从定刀刃口穿过。
2.2 灭茬动刀排布
动刀排列结构如图2所示。动刀座采用双螺旋方式排列焊接在灭茬刀轴上,等距均匀分布,轴向相邻距离67 cm,径向相邻动刀座呈85°等分。每个动刀座上安装两把动刀,每对动刀下端开口约120°呈Y型。
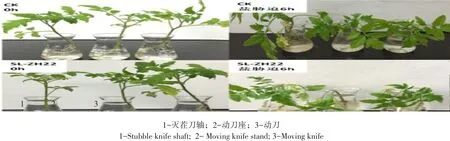
图2 动刀排列结构Fig.2 Structure of stubble device
2.3 灭茬动刀运动轨迹
机具作业时,动刀旋转同时随机具前进,因此动刀绝对运动由两种运动合成。设计灭茬刀轴转向为反转,动刀端点绝对运动水平分速度与机具前进方向相反,动刀运动轨迹为余摆线。
设灭茬刀轴旋转中心为坐标原点,灭茬免耕播种施肥机前进方向为X轴正向,Y轴正向竖直向下(见图3),Q点为动刀顶端。动刀端点初始位置与X轴重合水平,则动刀端点轨迹方程为

式中,R—动刀端点回转半径(m);ω—灭茬刀轴旋转角度速度(rad·s-1);vm—机具前进速度(m·s-1);t—时间(s)。
动刀端点在X轴Y轴方向分速度为

动刀端点绝对速度V为

灭茬刀轴转速是灭茬结构关键参数,可通过式(6)[7]确定灭茬刀轴转速范围。

式中,n—刀轴转速(r·min-1);V—为动刀端点线速度(m·s-1);h—切茬高度(m)。
灭茬免耕大豆播种机正常作业时,前进速度取 vm=1.11~1.67 m·s-1,取切茬高度h=0.15 m。本机设计动刀为两个L型开口动刀片,通过螺栓对称安装在一个动刀座上,整体呈Y型,动刀最大回转半径R=0.27 m,在节能前提下提高切茬粉碎效果,取动刀端点线速度V=25 m·s-1,将以上数据代入公式(6)[7]得出灭茬刀轴转速n ≥ 1 857 r·min-1,由于作业过程中速度、秸秆稠密度存在波动,设计灭茬刀轴转速n为1 800~2 000 r·min-1。
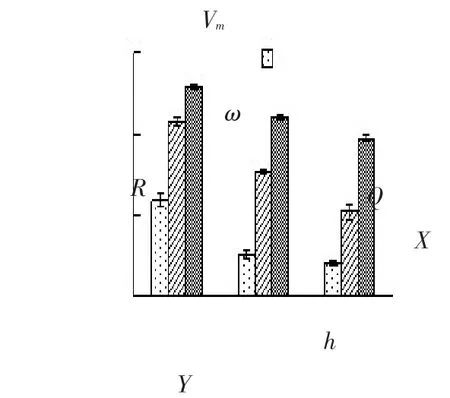
图3 动刀运动轨迹Fig.3 Trajectory of knife moving
2.4 开沟器设计
为提升开沟器入土能力,确保沟深、沟宽稳定性,便于排种,设计开沟器类型为锄铲式。开沟器前端作曲面处理,后方设计成空心便于排种和排肥,根据当地农艺要求,大豆播种行间距取30 cm,设计相邻开沟器间距30 cm。
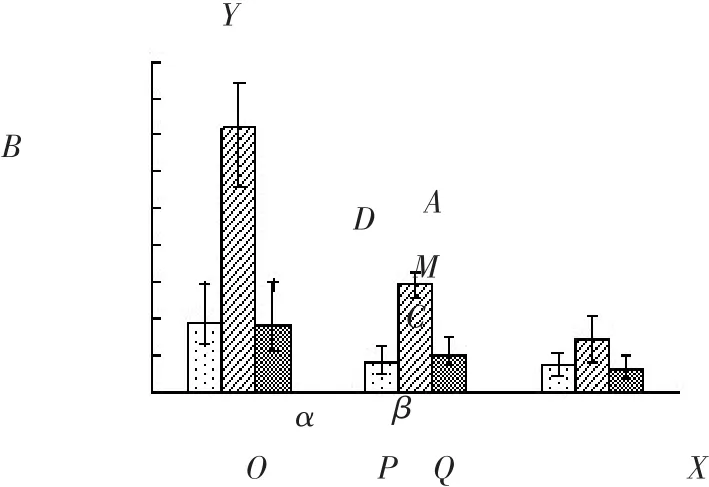
图4 开沟器曲面设计Fig.4 Surface design of trench opener
假设开沟器曲面弧线OA方程为[8]

式中,a、b—圆心B坐标;r—圆半径(mm)。
尖角处O点坐标(0,0),开沟曲面与竖直面结合处A点坐标(60,80),C点为O、A点与开沟器曲线切线交点,即,α、β为O、A处入土角。α过小,开沟器强度变小,尖角变长;α过大,入土能力差,动土严重,保墒效果差。经查阅资料,取α为25°[8],β为80°。为便于分析计算,在曲线方程上作相应辅助线。D点为直线OA中垂线。在四边形OCAB和△OBC、△ABC中,可得出式(8):

式中,OA为点O、A间直线距离(mm)。
由A点坐标得直线OA为100 mm,将α、β值分别带入式(8)中,得r=106 mm,再将r代入(7)得曲线方程为

则锄铲式开沟器曲线OA上任意一点M入土角θ计算公式为

式中,OM为曲线上P点到M点直线距离(mm)。
由于本设计锄铲式开沟器用于排种和排肥,开沟深度45~65 mm不等,计算时取入土深度为55 mm,即M点坐标(55,60)代入(10)中得M点入土角为35°,符合设计要求。
3 机架静力学仿真分析
3.1 建立简化后机架有限元模型
由于机器在实际工作中7行同时开沟,且结构简单,机架主要由两根60 mm×80 mm×3.5 mm方管,罩壳、两根方管中梁和左右厚10 mm侧板焊接而成,牵引力和阻力过大导致机架变形损坏,需仿真分析机架静力。利用solidworks软件绘制整机三维模型,将简化后模型文件保存为.igs格式,导入ANSYS/Workbench软件,机架材料选用普通碳素钢,ANSYS/Workbench软件默认材料为普通碳素钢,无需设置材料参数。通过自动划分网格后,更改网格尺寸,共划分17 290个单元,47 301个节点。
3.2 加载和约束
工作时引起机架变形原因是牵引力和开沟阻力,阻力计算通过F=khd[9](F牵引阻力,k土壤黏性系数,h开沟深度,d开沟宽度)。查阅资料并结合实际情况,沟深取5 cm,沟宽6 cm,黏性系数取8,计算牵引阻力约F=240 N,简化后模型对应安装开沟器及悬挂架位置设置加载和约束。
3.3 有限元分析结果
经仿真软件分析运算得出位移分布云图5a和应力分布云图5b,由图5a可知,应力集中产生于后面一根横梁中部及与左右侧板焊接处,应力最大值7.90×107Pa;位移变形最大处发生在后面一根横梁中间部位,应变最大值1.34 mm。结合实际田间作业环境,对照普通碳素钢材料特性可知,设计不合理,需改进。
3.4 建立改进后简化后机架有限元模型
改进办法:在机罩壳上方两横梁中间焊接4根80 mm×80 mm×5 mm连接梁,增强装置强度。按照上述仿真步骤,将改进后简化机架模型导入ANSYS/Workbench软件,机架材料选用普通碳素钢,通过自动划分网格后,更改网格尺寸,共划分18 186个单元,53 477个节点。
3.5 加载、约束和有限元分析结果
仿真改进后机架受载,添加相同载荷得出相应位移分布云图6a和应力分布云图6b,由图6a可知,改进后机架应力分布均匀,应力最大值5.22×106Pa;位移变形最大处发生在罩壳边缘及侧板边角处,机架应变最大值为4.64×10-5mm,对比改进前仿真结果,改进后机架刚性明显改善,对照普通碳素钢材料特性可知,改进合理,设计符合要求。
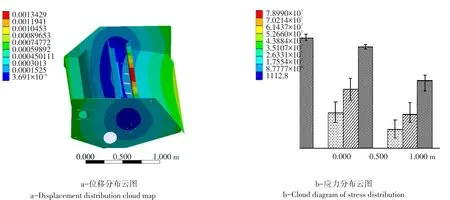
图5 有限元分析结果Fig.5 Finite element analysis results
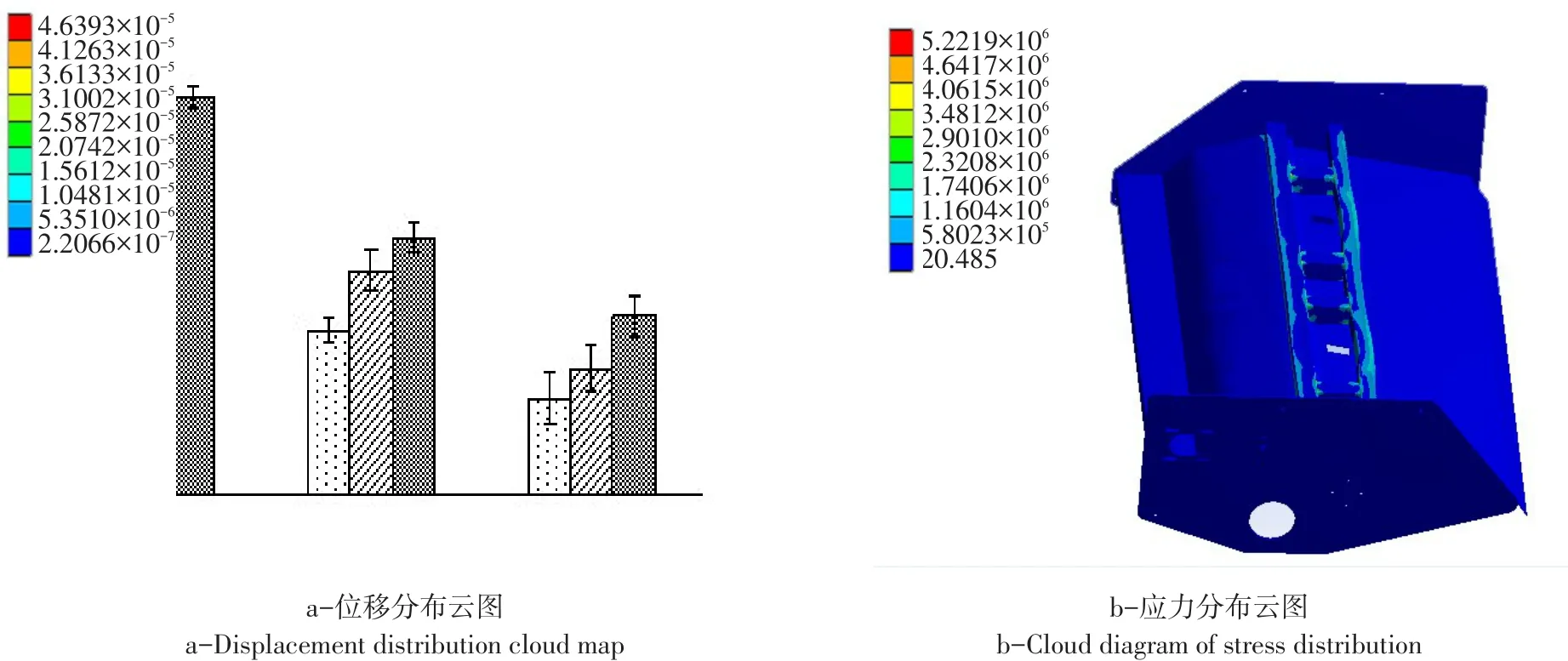
图6 改进后有限元分析结果Fig.6 Improved finite element analysis results
4 田间试验与结果分析
4.1 试验条件
2018年6月18日在安徽省宿州市芦岭镇播种大豆。芦岭镇位于安徽省北部,属暖温带半湿润季风气候,前茬作物小麦,机收留茬高度15~22 cm,土壤绝对含水率18%~24.5%,试验选用拖拉机型号为雷沃M1200-DA1,标定功率为88.2 kW,动力输出轴转速:760/1 000 r·min-1。
4.2 试验方法
按国家标准GB/T 20865—2007《免耕施肥播种机》[10]规定的方法和农业部农业机械推广鉴定大纲《免耕施肥播种机》[11]开展灭茬免耕播种机性能试验。试验内容包括机具通过性、秸秆粉碎率、晾籽率、播种深度合格率、粒距合格率、重播指数、漏播指数等。检测设备包括电子秤、卷尺和铲子等。
4.2.1 机具通过性
测试长度为100 m,往返一个行程不发生堵塞或者有一次轻度堵塞视为合格[12]。本试验在全秸秆覆盖地9次播种测试。
4.2.2 秸秆粉碎效果
在测试地块,按照对角线法选5点,每点用1 m×1 m测试框取样;测量每个测点秸秆总质量和粉碎长度合格秸秆质量(合格秸秆长度≤8 cm),按式(11)计算各点根茬粉碎率[13]。

式中,P—根茬粉碎合格率(%);Mh—合格秸秆质量(g); Mz—秸秆总质量(g)。
4.2.3 晾籽率测量
在机具作业后行程内,本试验交叉选取5个测区,每个测区长度为2 m,宽度为一个作业幅宽。按照公式(12)计算晾籽率[14]。

式中,T—晾籽率;X—晾籽数;N—区域面积内播种总数。
4.2.4 播种深度合格率
随机取5行,每行在10 m内随机取5个点,人工扒开土层测量播种深度(以当地农艺要求播种深度为h,h±1 cm合格),计算播种深度合格率。
4.2.5 田间播种均匀性
播种均匀性试验在往返各一个单程中,随机选定5组,每组长2.5 m,宽为一个作业幅宽,在不改变种子位置前提下,把种沟覆土拨开测量,计算粒距合格指数、重播指数和漏播指数。
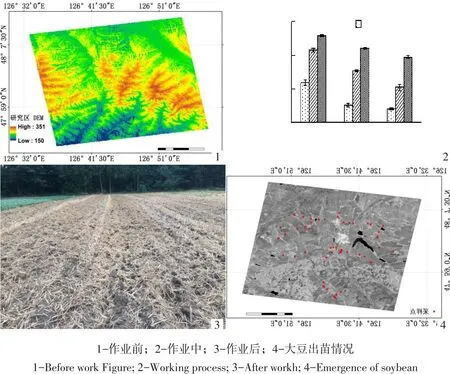
图7 田间试验Fig.7 Fieldexperiment

表1 试验因素与水平Table 1 Factors and levels of test
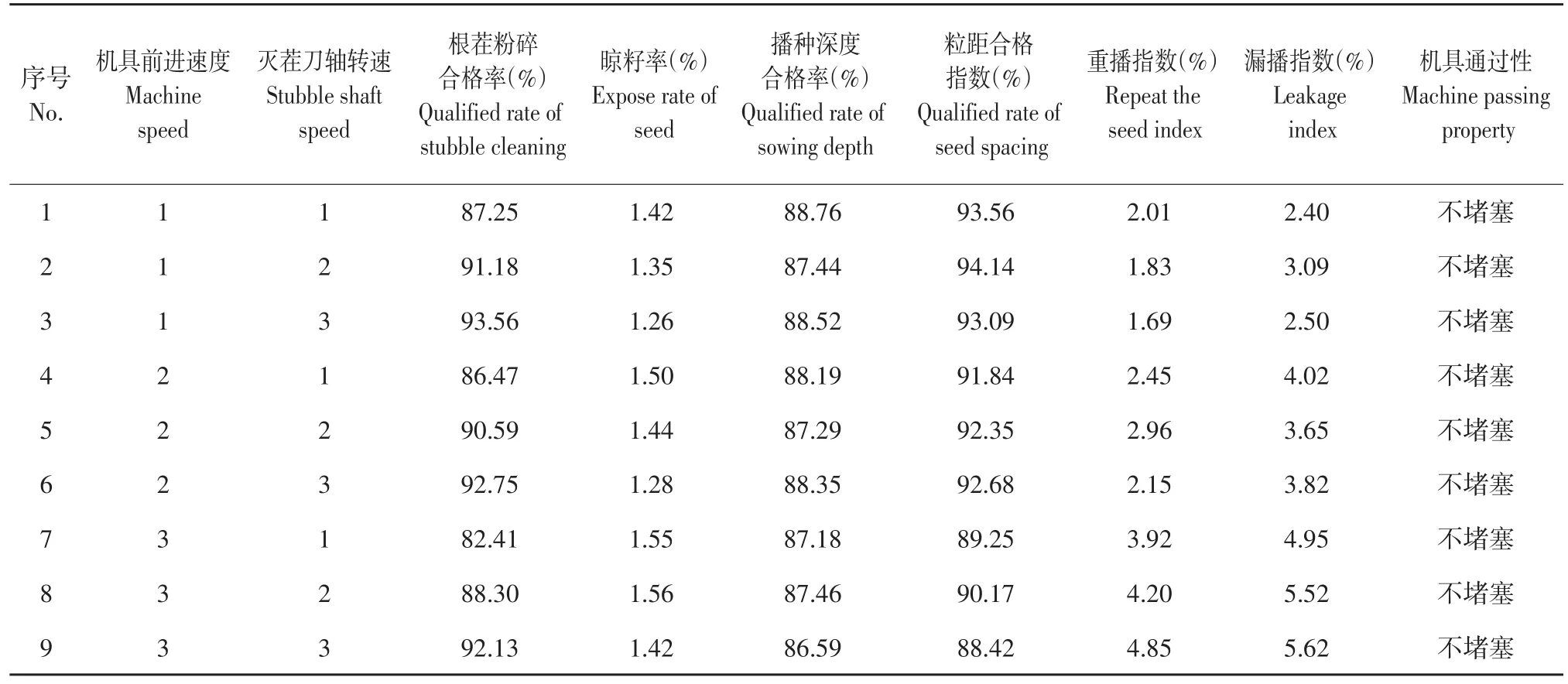
表2 正交试验结果Table 2 Results of orthogonal experiment
4.3 试验结果与分析
由表2可知,麦秸秆覆盖地9次测试,均无拥堵现象,机具通过性良好;在根茬粉碎率测定中,根茬粉碎状况较好,平均根茬粉碎合格率89.40%,平均晾籽率1.42%,平均播种深度合格率87.75%,平均粒距合格指数91.72%,平均重播指数2.90%,平均漏播指数3.95%,测量数据均符合GB/T 20865—2007《免耕施肥播种机》国家标准,满足设计要求。
机具前进速度和灭茬刀轴转速影响晾籽率和田间播种均匀性。相同前进速度,灭茬刀轴转速越高,秸秆粉碎效果越好;相同灭茬刀轴转速,机具前进速度越快,粒距合格指数降低,重播指数、漏播指数升高。机具前进速度和灭茬刀轴转速对播种深度影响较小,播种深度受限深轮控制。最优试验因素组合是机具前进速度1.39 m·s-1、灭茬刀轴转速2 000 r·min-1,根茬粉碎合格率、晾籽率、播种深度合格率、粒距合格指数、重播指数、漏播指数分别为92.75%、1.28%、88.35%、92.68%、2.15%、3.82%。
5 结论
a.设计一种灭茬免耕播种施肥机,与传统免耕播种机不同之处:在锄铲式开沟器前安装灭茬粉碎装置,灭茬刀轴高速反转使动刀切断根茬,动刀配合定刀把秸秆粉碎后抛向机具后方,实现洁区播种。
b.机具前进速度和灭茬刀轴转速对播深稳定性影响较小;机具前进速度影响田间播种均匀性;机具前进速度和灭茬刀轴转速影响根茬粉碎合格率和晾籽率,影响因素排序为灭茬刀轴转速>机具前进速度;通过数学建模、运用ANSYS/Workbench软件仿真分析关键部件承载情况,对后期生产加工具有指导作用。
c.经试验验证可实现洁区播种,解决秸秆堵塞播种机问题,试验各项指标均满足免耕播种机设计要求。最优试验因素组合:机具前进速度1.39 m·s-1、灭茬刀轴转速2 000 r·min-1,根茬粉碎合格率92.75%、晾籽率1.28%、播种深度合格率93.35%、粒距合格指数92.68%、重播指数2.15%、漏播指数3.82%。
