一种水面无人艇航行及任务载荷复合控制方法
2018-11-06韩佩妤
韩佩妤,韩 玮,梁 旭
(中国船舶工业系统工程研究院,北京 100194)
1 引 言
水面无人艇是一种无人操作的水面舰艇,能够自主规划、自主航行,并且可以采用自主方式或人工干预方式完成环境感知、目标探测等各项任务的小型水面舰艇,主要用于执行危险及不适合有人船只执行的任务。水面无人艇一旦配备先进的控制系统、感知系统、通讯系统和任务系统后,可执行多种任务,且具有高航速、大航程、浅吃水、多功能、机动性强、搭载方便、自主操控等突出优点[1],无论是在情报侦察和战场监视等军事领域,还是在海洋探测、调查取证、货物运输等民用领域,都有十分广阔的应用前景。
直到20世纪90年代,关于水面无人艇的研究项目才大量出现。美国、以色列、英国、法国和德国等国已将水面无人艇作为重要军事项目进行研究和开发[2],其中最具代表性的是美国的斯巴达侦察兵(Spartan Scout)和以色列的保护者等。美国通用动力公司研制的斯巴达侦察兵水面无人艇拟作为一种扩展的传感器和武器平台,执行侦察、搜索和情报任务、精确打击任务和浅海海域水下作战任务等,以支持美军联合特遣部队、航母打击编队、两栖部队和海上补给作战任务。以色列主要发展执行情报侦察和战场监视、警戒巡逻、反水雷、火力打击等任务的水面无人艇,以保护其港口及海上设施安全[3],以色列水面无人艇的共同特点是充分借鉴无人机技术。目前,国外主要的水面无人艇都具备多任务的特点,可以通过搭载不同的任务载荷,实现战场监视、警戒巡逻、反水雷、火力打击等任务,并具有一定的自主控制能力。

图1 美国斯巴达侦察兵无人艇

图2 以色列保护者无人艇
国外无人装备正致力于动力控制系统与任务系统的复合控制研究[4]。美国等西方国家正大力研究无人作战飞机飞行控制系统和火力控制系统的耦合,将任务、飞行、作战三方面进行综合并提高综合化、自动化、智能化水平以构成全自动攻击系统。无人作战飞机激光制导武器自动攻击技术,基于火力/飞行耦合控制器把火力指挥与控制系统与飞行控制系统综合成一个闭环武器自动攻击系统,用火控系统输出的瞄准误差,自动操纵飞机的飞行系统。该技术将传感、跟踪设备获得的信息处理后得到目标位置、速度、加速度的精确估值作为火力控制的输入,火力控制系统解算出俯仰偏差、方位偏差和相对距离等信息,由智能耦合控制器经综合计算后,产生可由飞行控制系统接收的俯仰、滚转、偏航指令分配到飞行控制系统的各个通道中,以便控制飞机实现快速瞄准和精确打击。另外,国外的无人车等无人装备也在开展类似的研究。
国内在无人机等无人装备领域已经开展了动力控制系统与任务系统的复合控制相关研究[5,6],并取得了一定进展。在水面无人艇领域,航行自主控制方面已经有一定的技术积累和发展;但在任务执行方面,只能在人工指挥下按照预先规划的航路和步骤进行,尚未开展针对任务的航行与任务复合控制的相关研究。
2 水面无人艇的自动化与智能化发展趋势
智能化和自动化已经成为水面无人艇的发展趋势之一[7]。水面无人艇及其搭载的任务载荷的智能控制将带来性能的进一步提升。
水面无人艇的控制包括航行控制和任务控制。航行控制按照设定的航路对艇平台及动力系统进行控制,并通过分析导航设备、航行探测设备采集的信息等实施避障。任务控制按照任务执行要求进行目标探测、目标信息计算处理,并对目标进行相关操作。通常在执行任务时,需要同时进行航行控制和任务控制,使水面无人艇航行状态与任务载荷执行任务状态相适应,该过程依赖于对当前态势精准灵活的判断及指挥控制。在水面无人艇航行与任务相互独立控制时,无人艇航速、艏向等航行状态会影响任务载荷的使用,为保证任务的正常进行,需要对无人艇实施有效的航行控制来保障任务载荷的使用条件。如果航行控制与任务控制相互独立,则只能依赖指挥员完成态势判断和指挥。
基于无人驾驶的特性,水面无人艇可以放宽航行品质的限制和要求,只根据任务执行的要求,最大限度地追求控制效率。但是因为艇上没有驾驶员和指挥员,使得水面无人艇的航行必须依靠自动航路规划及控制,或者依靠无线通信进行的远程指挥,任务控制必须在水面无人艇当前航行姿态下进行。无线通信带宽有限,数据传输面临的干扰大,准确率低于有线传输,传输过程中的数据安全性也更难保证。指挥员判断指挥需要的数据量大,对数据实时性要求高,且对无线通信的要求极高,这一要求很难实现。这种指挥方式下,航行控制部分与任务控制部分信息交互很少,大量信息汇集到控制中心,由远程指挥的指挥员进行协调控制。此外,由于固有的生理因素限制,如估算精度、动作准确性、反应时间等,指挥员并不能充分利用水面无人艇及任务载荷的全部能力,较难实现机动灵活的航行及任务载荷复合控制。
将航行控制与任务控制进行有机结合,进行航行及任务复合控制,就可自主进行态势判断和决策,能够有效避免无线通信和远程指挥的不足,提高任务执行质量,缩短决策时间,降低指挥员的工作负担,提升水面无人艇自主控制的智能化和自动化水平。
3 水面无人艇航行及任务载荷复合控制方法
3.1 基本原理
水面无人艇航行及任务载荷复合控制方法,将互不干涉的水面无人艇任务控制和航行控制有机结合,将基于外部海洋环境和障碍物信息进行避障等航行控制的控制模式,转变为不仅基于海洋环境和障碍物信息,同时也基于目标信息和任务背景,以任务执行为制导,进行水面无人艇航行及任务载荷复合控制的模式。航行及任务载荷复合控制原理如图3所示。
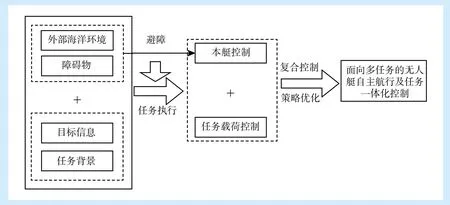
图3 航行及任务载荷复合控制原理示意图
3.2 航行及任务载荷复合控制信息连接关系
根据航行及任务载荷复合控制流程,以及各控制单元之间的反馈关系,分析各控制单元与航行载荷、任务载荷之间的信息连接关系[8],如图4所示。
水面无人艇动力装置将水面无人艇姿态信息发送到航行及任务载荷复合控制单元与任务控制单元。航行控制单元根据障碍物探测设备发送的障碍物位置,将舵角和发动机转速发送到水面无人艇动力装置,控制水面无人艇实施避障。任务控制单元接收目标探测设备发送的目标位置、目标速度、目标方向、目标大小等信息,并可对多个目标探测设备发送的目标信息进行信息融合,形成水面无人艇对外部环境的综合态势感知。水面无人艇根据环境态势感知发送执行动作命令,由任务执行设备对机动目标实施动作。航行及任务载荷复合控制单元根据任务控制单元反馈的任务执行设备指向偏差和航行控制单元反馈的避障信息,综合分析当前的任务执行状态和航行状态,输出任务控制命令和航行控制命令。
根据任务载荷运行原理,分析各任务载荷能够有效执行任务的区域范围,构建任务有效区模型。任务载荷应当包括目标探测设备、任务执行设备等,应当构建目标探测设备有效工作区模型,以及任务执行设备有效工作区模型。
在构建任务有效区模型的同时,依据水面无人艇艇体基本参数、推进系统性能、任务载荷搭载能力等,分析水面无人艇极限机动能力范围,构建航控有效区模型。
3.3 航行及任务载荷复合控制单元
将每个航行及任务控制目标实现过程分解为多个任务控制与航行控制的组合,并分析各控制单元之间的控制与制约关系,构建航行及任务载荷复合控制单元。航行及任务载荷复合控制单元原理如图5所示。
航行及任务载荷复合控制单元根据当前任务执行状态和航行状态,判断是否可以通过调整航行状态来配合任务执行。当需要通过调整航行状态来配合任务执行时,根据任务执行要求设定参考航路,并不断修正,由智能耦合控制单元将航行控制所需的航速、航向等输出到航行控制单元,同时航行控制单元也可向智能耦合控制单元反馈避障信息等限制航行控制的条件。
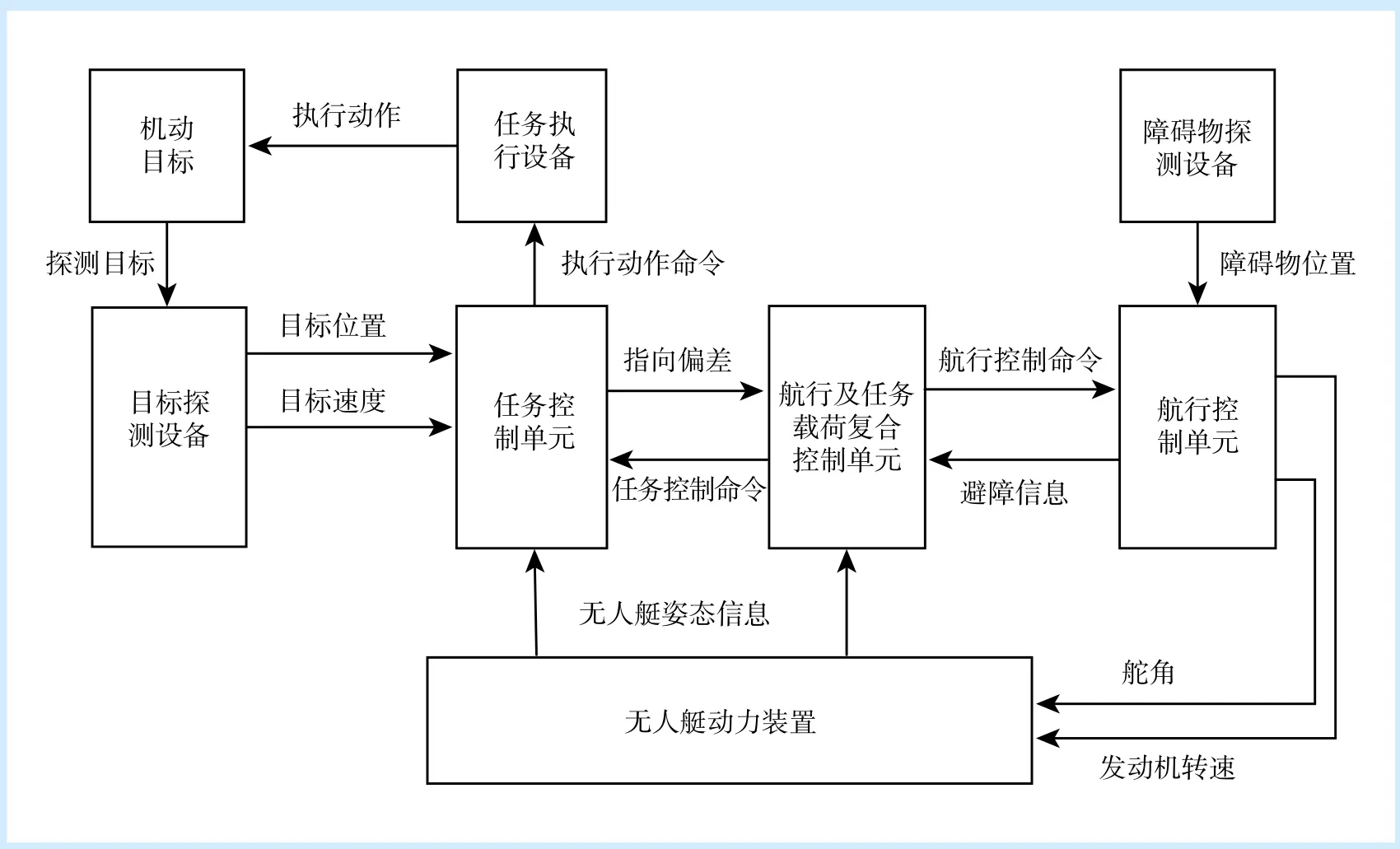
图4 航行及任务载荷复合控制信息连接关系图
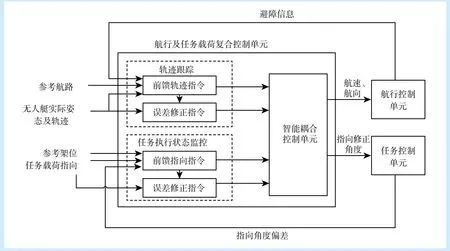
图5 航行及任务载荷复合控制单元原理图
当需要通过调整任务控制状态来直接实现任务执行时,先设定任务载荷参考指向,并不断修正,由智能耦合控制单元将任务控制所需的任务载荷修正角度等输出到任务控制单元,同时任务控制单元也可向智能耦合控制单元进行反馈。当任务执行状态受到航行状态变化等因素干扰时,为了保证任务的顺利执行,智能耦合控制单元也可以迅速制定航行及任务控制策略,通过改变航行状态或是任务载荷状态,进行航行及任务自适应控制。
智能耦合控制单元作为航行及任务载荷复合控制的联结,在水面无人艇原来的航行控制单元和任务控制单元未作改动的情况下,只根据任务执行的需要,输出需要调整的航速、航向等航行控制参数,以及任务载荷的指向修正角度等参数,分别输入到航行控制单元和任务控制单元,由航行控制单元和任务控制单元分别对航行状态和任务执行状态进行实时修正。
3.4 智能耦合控制单元
智能耦合控制单元是航行及任务载荷复合控制单元的核心,可根据水面无人艇当前的航行轨迹和任务执行状态,结合任务执行目标、当前海况、综合态势等因素,进行综合分析,做出决策,将该决策结果分解为任务控制目标和航行控制目标,进而分别将航行控制目标转化为航速、航向输入到航行控制单元,将任务控制目标转化为任务执行设备的指向修正角度输入到任务控制单元。
智能耦合控制单元制定的航行及任务载荷复合控制策略是水面无人艇任务执行质量的关键因素。为了不断提高智能耦合控制单元制定决策的能力,应当使其具有机器学习能力[9],可根据神经网络、模糊数学等智能化机器学习模型,设计适用于智能耦合控制单元的机器学习模型[10]。通过任务执行,对该模型进行训练,实现航行及任务载荷复合控制策略的持续优化。
航行及任务载荷复合控制策略的优化过程需要结束判定条件,当有多种控制策略时,也需要最优策略判定标准。通过建立控制策略判定规则库,构建控制策略智能判定模型,确定控制策略的选取和判定标准。
4 结束语
航行及任务载荷复合控制单元是水面无人艇航行及任务载荷复合控制的核心,是联系任务控制与航行控制的枢纽。它用任务控制输出的指向误差,自动进行航行控制,提高任务控制的精度,将原本分离的任务控制与航行控制有机地结合在一起,组成了一个闭环航行及任务控制系统,实现复合控制。智能耦合控制单元的好坏与智能化程度都直接影响任务执行的质量。