四旋翼无人机的主动容错控制
2018-11-06尹雄东苓苗苗
王 君,尹雄东,苓苗苗
(兰州理工大学电气工程与信息工程学院,兰州 730050)
1 引 言
近年来,由于四旋翼无人机(Quadrotor UAV)具有全自主飞行、结构轻巧、垂直起降等优势,在军事和民用领域备受青睐,因此,为确保四旋翼无人机的飞行性能而对控制器的研究吸引了大量学者的广泛关注[1]。各种不同的先进控制方法已经广泛应用于四旋翼无人机的控制中,如自适应控制[2],滑膜控制[3]、反步法控制[4]、PID控制[5]等,其中PID控制技术由于不需要精确的数学模型,控制算法简单而在无人机的飞控系统中最为流行。在实际工程中,四旋翼无人机的PID控制器参数利用传统的经验试凑法很难达到最优,因此许多研究者提出了各种参数优化算法,如神经网络[6]、遗传算法[7]、粒子群算法[8]等,但这些优化算法多数是在线调节控制器的参数,需要花费一定时间,时效性不足。
另外,四旋翼无人机的执行机构数量较多,在飞行过程中难免会发生故障,因此,对四旋翼无人机的容错控制技术的需求越来越迫切[9]。被动容错控制[10]具有一定的鲁棒性,不需要在线估计故障,可以保障在执行机构发生可能的失效故障情形下正常飞行,但被动容错控制器的设计具有一定的保守性。而主动容错控制通过故障调节或信号重构保证故障发生后系统的稳定性能。但是,它需要先对故障进行诊断。基于模型的故障诊断方法依靠模型的准确度,然而四旋翼无人机的模型很难准确得到,因此,基于数据驱动的神经网络已经引起了研究者的关注,深度学习是能够模拟人脑的结构建立进行分析和学习的多层神经网络,可用于故障诊断分类[11]。
本文针对四旋翼无人机正常飞行和执行器任意部分失效故障情况下,提出了基于遗传算法离线优化PID参数的主动容错控制方案。首先利用遗传算法离线优化PID的参数,使四旋翼无人机正常飞行,然后设计5个基于区间故障的容错控制器使无人机对执行器的任意部分失效故障容错处理,在无人机飞行过程中,实时通过深度置信网络(DBN)和softmax对故障进行判断分类,从而选择对应的容错控制器,确保四旋翼无人机的飞行性能。
2 四旋翼无人机动力学模型
2.1 四旋翼无人机运动学模型
通过牛顿-欧拉公式可得四旋翼无人机运动学模型[6]为:
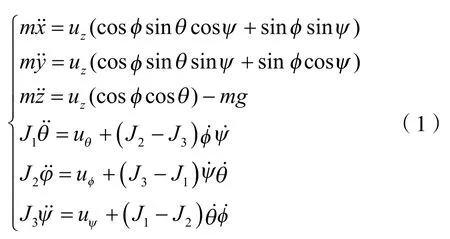
式中,θ、 、ψ分别表示四旋翼无人机的俯仰角、滚转角和偏航角,J1表示四旋翼无人机绕x轴的转动惯量,J2表示四旋翼无人机绕y轴的转动惯量,J3表示四旋翼无人机绕z轴的转动惯量,x、y、z分别表示四旋翼无人机在三轴方向位移,m是四旋翼无人机的质量,g是重力加速度,uz、uθ、u、uψ是四旋翼无人机的四个虚拟控制输入,将它们表示为四个电机的转速形式,如式(2)所示:
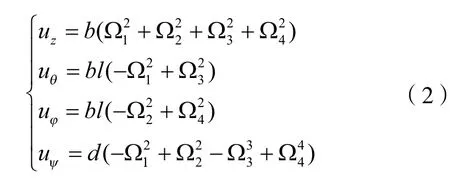
式中,Ωi表示第i个电机的转速,b表示拉力系数,l表示臂长,d表示推力转动量系数 。将式(2)表示成矩阵形式,如式(3)所示:

其中转速和虚拟控制输入的关系用系数矩阵Γ表示即:

2.2 四旋翼无人机执行器失效故障表示
当四旋翼无人机执行器发生失效故障时,四个旋翼的升力将发生变化,导致四个虚拟控制输入发生变化,则引入执行器失效故障之后的系数矩阵如式(5)所示。
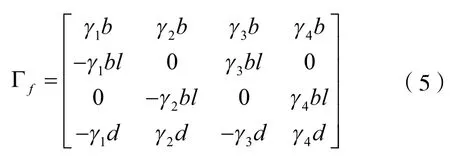
其中γi表示第i个执行机构失效故障因子,当γi=1时,执行机构无故障;当γi=0,执行器发生完全失效故障;当0<γi<1时,执行器发生部分失效故障。
3 DBN和softmax故障分类
3.1 DBN和softmax描述
人类大脑在接收外部信号时,是通过一个多层的结构来获取数据的规律,这些大脑机理的发现,促使了深度学习的产生和使用。DBN作为深度学习的经典算法之一,能够通过一系列的非线性变换自动从原始数据中提取由低层到高层、由具体到抽象的特征。
DBN是由多个限制玻尔兹曼机(RBM)组成的多隐含层神经网络,其核心就是用逐层贪婪学习算法去优化深度神经网络的连接权重,即首先使用无监督逐层训练的方式,有效挖掘待诊断设备中的故障特征,然后在增加相应分类器的基础上,通过反向的有监督微调,优化DBN的故障诊断能力。其中无监督逐层训练通过直接把数据从输入映射到输出,能够学习一些非线性复杂函数,这也是其具备强大特征提取能力的关键所在,RBM作为DBN模型的基石,在DBN模型构建和训练中,起到至关重要的作用。
每个RBM包含一个可视层和一个隐含层,通过RBM 的逐层堆叠,DBN模型可从原始数据中逐层提取特征,获得一些高层次表达。RBM中的权重和阈值被持续更新,直到达到最大的迭代次数。RBM的图形描述如图1所示。
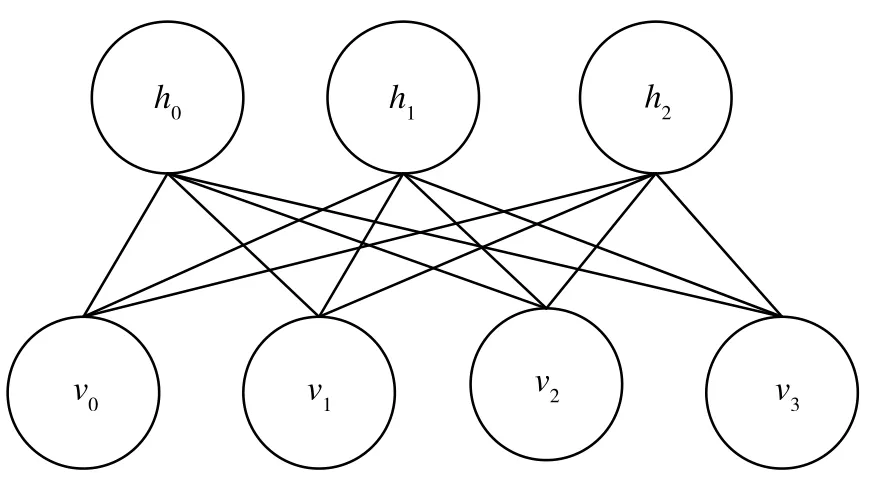
图1 限制玻尔兹曼机结构示意图
RBM能量方程E(v,b)可表示为:

W表示隐藏单元和可见单元连接的权重,b和c是可见层和隐藏层的偏置。
转化成自由能量公式如式(7)所示:

由于RBM的特殊结构,可见和隐藏单元是条件独立的,利用这个特性,可以得出条件概率密度函数为:

得到RBM网络的概率密度函数后,需要学习(w,a,b)等参数使RBM网络表示的吉布斯分布最大可能的拟合输入数据,一般采用求解输入样本的最大似然的方法来进行参数的求解。
DBN作为一种自我学习的特征提取算法,以其强大的特征提取能力和不需要大量标签数据的参与,在很多应用领域已经被广泛使用。DBN示意图如图2所示。

图2 DBN结构示意图
3.2 DBN和softmax对四旋翼无人机故障分类
在运用DBN对四旋翼无人机进行故障诊断时,首先需要获取故障数据,对故障数据使用无监督方式逐层进行训练,实现对四旋翼无人机典型故障特征的有效挖掘;然后在增加softmax分类器的基础上,通过BP算法以有监督的方式对DBN进行反向微调,从而使DBN具有对于故障的诊断能力。其诊断流程图如图3所示。
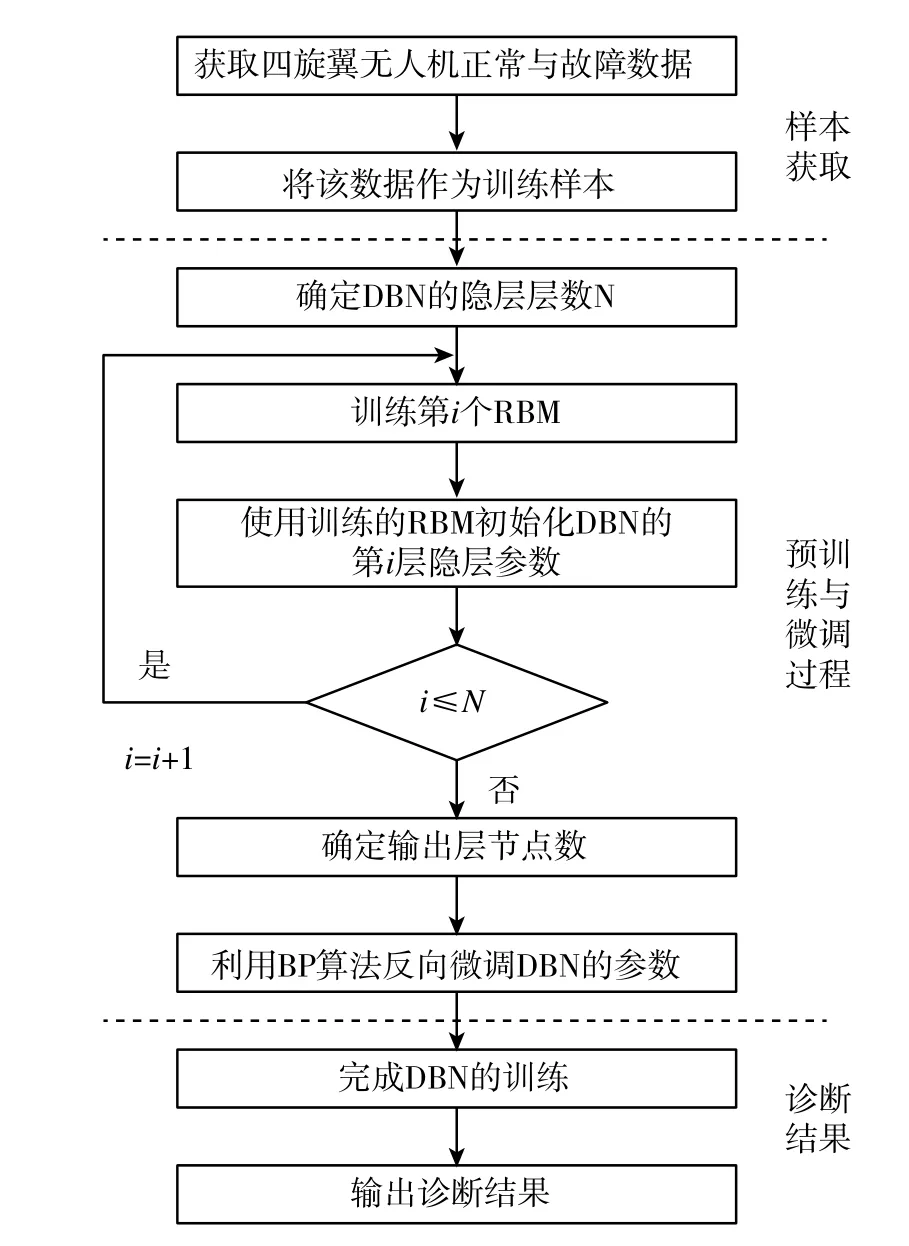
图3 DBN故障诊断流程图
考虑到四旋翼无人机故障类型繁多,本文只针对常见的执行器部分失效故障的情况对其进行分类。为便于数据的采集,将四旋翼无人机按照正常运行和故障严重程度分为5种情况,下面是对单个执行器发生失效故障的区间分类:
(1)正常情况:γi=1,此时四旋翼无人机的第i个旋翼无故障发生;
(2)轻微失效故障:0.7≤γi<1,此时四旋翼无人机的第i个旋翼由于老化等原因发生较少的折损;
(3)较轻微失效故障:0.5≤γi<0.7,此时四旋翼无人机的第i个旋翼发生一般的折损;
(4)中等失效故障:0.3≤γi<0.5,此时四旋翼无人机的第i个旋翼发生较大程度的折损;
(5)严重失效故障:0.1≤γi<0.3,此时四旋翼无人机的第i个旋翼发生很大程度的折损。
假设四旋翼无人机四个旋翼中只有一个旋翼发生故障并通过以上的分类采集大量的数据用于DBN和softmax的离线训练与学习,采集数据和样本标签如表1所示。

表1 四旋翼无人机故障数据集描述
基于DBN模型进行四旋翼无人机故障诊断中,对采集的数据进行归一化以消除数据之间的量纲影响,然后将数据按比例随机产生训练集与测试集,其中75%的数据用于DBN和softmax离线的训练与学习,25%的数据测试验证网络的正确性。当执行器发生故障时,可通过训练好的网络对故障进行快速估计分类。
4 四旋翼无人机容错控制器设计
4.1 四旋翼无人机 PID控制器的设计及参数优化
PID控制器是一个经典控制器,具有一定的鲁棒性,在线性和非线性领域具有广泛的研究,通过使实际输出和期望输入的误差变得最小来调节控制变量u(t),如式(10)所示:

式中,u(t)是输入信号,e(t)是信号误差。PID最优控制性能和参数优化,就是确定最佳kp、ki和kd三个参数,从而使控制系统的某一动态性能指标达到最优。传统PID控制器参数的寻优主要依靠大量的反复调试和经验,而遗传算法是一种模拟自然选择和进化过程的寻优算法,将遗传算法与PID控制结合起来,把PID控制参数编码成遗传算法的染色体,应用遗传算法实现PID参数寻优,从而使PID参数达到最优。
本文中,为了提高控制效率和减小系统振动,适应度的目标函数可表示为:

式中λ1,λ2代表权重系数,e(t)代表系统误差。遗传算法的流程图如图4所示。
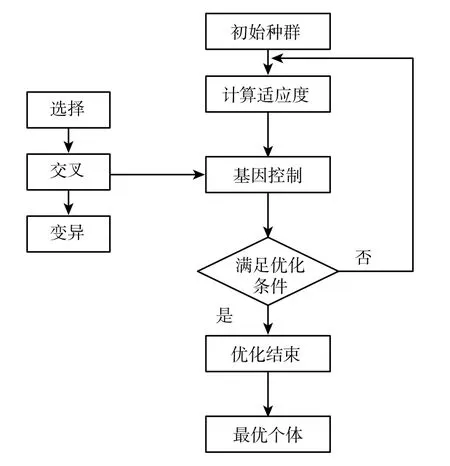
图4 遗传算法流程图
因此,利用遗传算法离线整定四旋翼无人机的PID控制器参数,可得到最优的PID控制器。
4.2 容错控制器的设计
利用遗传算法优化PID参数之后,四旋翼无人机在无故障条件下可以正常飞行,但由于四旋翼无人机执行机构的数量较多,在飞行过程中难免会发生故障,因此,设计容错控制器是研究的目标。但四旋翼无人机的模型很难精确的得到,因此,模型不确定用PID控制可提高控制性能,本文中容错控制器的设计是在PID控制器的基础上,对特定的故障进行补偿,构成容错控制器,利用所设计控制器的鲁棒性,来处理一定区间的故障。利用遗传算法优化PID的参数,然后和故障补偿机制构成容错控制器,控制原理如图5所示。
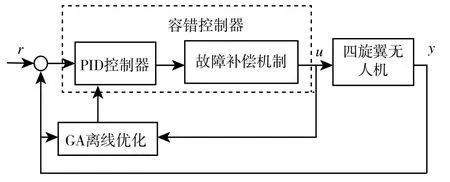
图5 容错控制原理图
四旋翼无人机单个执行器发生失效故障时,按照故障区间分类可设计5个带有故障补偿机制的容错控制器,如式(12)所示:

式中uj代表四旋翼无人机在第j种情况下的实际输入,u代表PID控制器的输出,uf j代表第j种故障补偿机制所产生的输出,即

其中故障区间分类如下:
(1)正常情况:此时四旋翼无人机只有PID控制器工作,即u0=u,uf0=0;
(2)轻微失效故障:此时四旋翼无人机利用PID和故障补偿机制来飞行,即

式中uf1是通过在轻微失效故障0.7≤γi<1中选取γi=0.8时,由式(13)获得,然后利用所设计控制器的鲁棒性来容错区间范围内的故障;
(3)较轻微失效故障:此时四旋翼无人机利用PID和故障补偿机制来飞行,即

式中uf2是通过较轻微失效故障0.5≤γi<0.7中选取γi=0.6时,由式(13)获得,然后利用所设计控制器的鲁棒性来容错区间范围内的故障;
(4)中等失效故障:此时四旋翼无人机利用PID和故障补偿机制来飞行,即

式中uf3是通过中等失效故障0.3≤γi<0.5中选取γi=0.4时,由式(13)获得,然后利用所设计控制器的鲁棒性来容错区间范围内的故障;
(5)严重失效故障:此时四旋翼无人机利用PID和故障补偿机制来飞行,即

式中uf4是通过严重失效故障0.1≤γi<0.3中选取γi=0.2时,由式(13)获得,然后利用所设计控制器的鲁棒性来容错区间范围内的故障。
四旋翼无人机在飞行过程中,通过DBN和softmax诊断分类出其所处状态,然后调用相应的容错控制器来进行控制飞行,系统结构如图6所示。
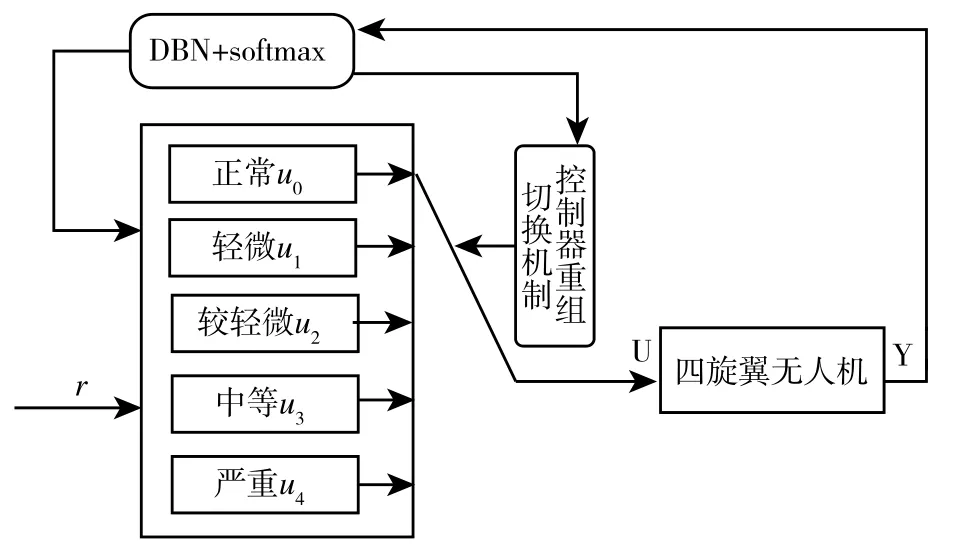
图6 四旋翼无人机的控制结构图
5 实验验证
为了验证所设计的四旋翼无人机容错控制器的有效性,本文在Matlab仿真平台上构建四旋翼无人机仿真系统,并对所提出的方法进行实验验证。
5.1 四旋翼无人机仿真系统相关参数
仿真实验中,根据参考文献[6],四旋翼无人机相关参数如表2所示。
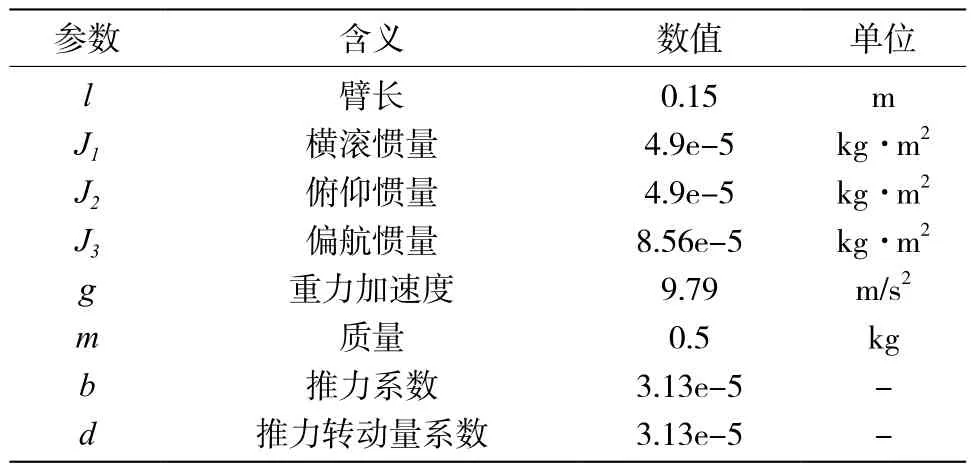
表2 四旋翼无人机相关参数表
5.2 仿真实验
对四旋翼无人机的PID控制器的参数优化和执行器可能出现的失效故障情况进行仿真,仿真中先用遗传算法对PID控制器参数进行优化,然后给执行器1施加故障,使其发生失效故障,通过DBN和softmax对其进行故障区间判断分类,然后调用相应的容错控制器进行容错控制。
四旋翼无人机在正常飞行时,只有PID控制器作用,因此,首先使用遗传算法优化PID控制器参数,可以得到遗传算法的适应值曲线如图7所示。

图7 遗传算法适应值曲线
由图7可知,利用遗传算法优化PID控制器参数,可以得到很好的适应值。
四旋翼无人机的PID控制器利用遗传算法优化参数,可以得到优化之后的PID参数,其中kp=14.6491,ki=0.2089,kd=8.9356。
四旋翼无人机在遗传算法优化后的PID控制下飞行时,利用DBN和softmax对无人机执行器状态进行监控,如图8和图10所示,系统的高度曲线如图9和图11所示。
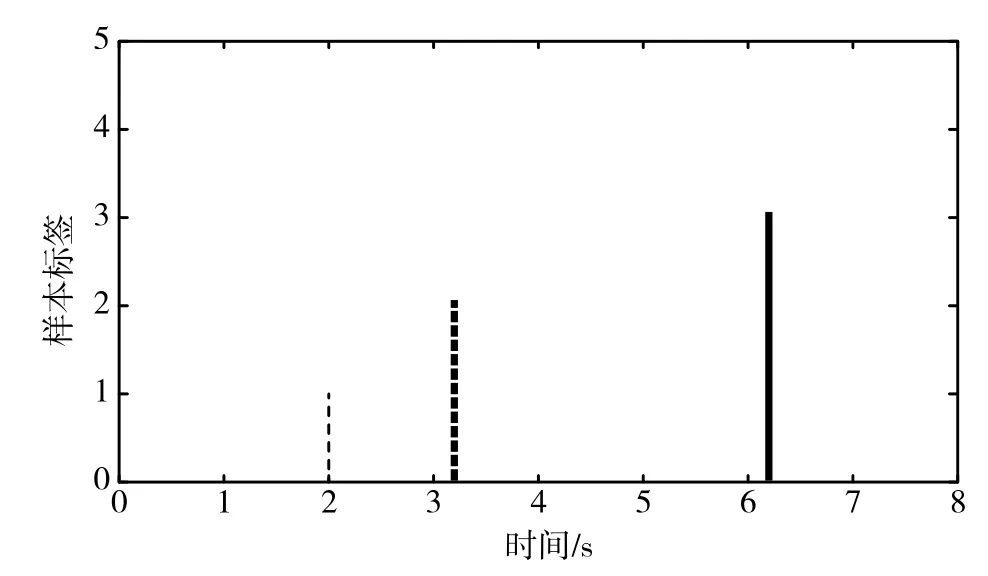
图8 DBN和softmax故障诊断图
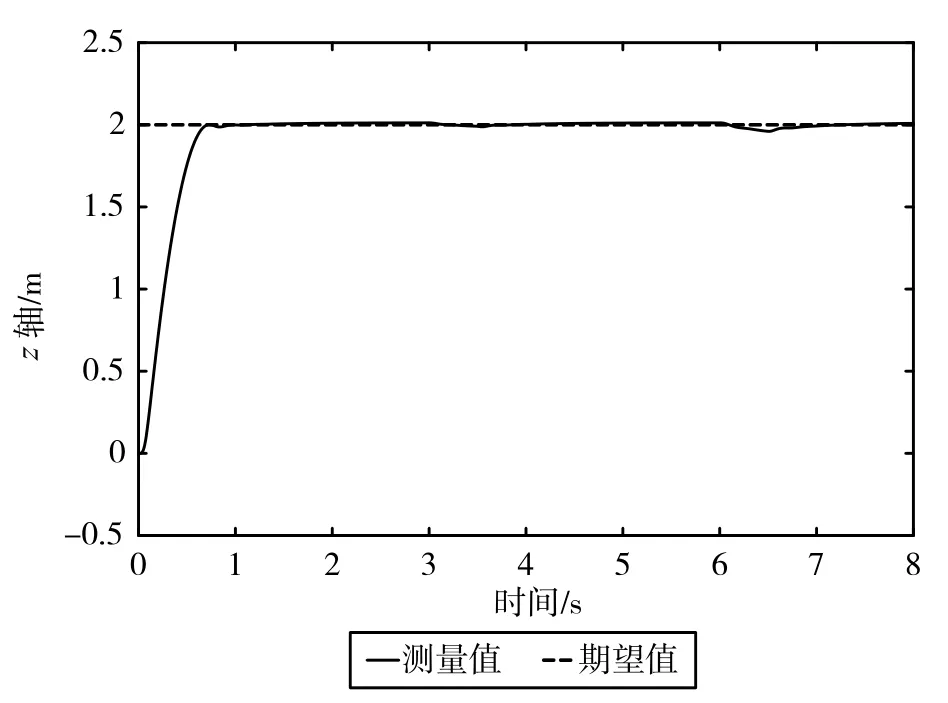
图9 四旋翼无人机状态响应图
由图8和图9可知,四旋翼无人机在无故障条件下飞行时,即DBN和softmax的故障诊断结果为1,此时在容错控制器u0的控制下,系统可以很快跟踪期望值;当执行器1在t=3s发生故障时,由DBN和softmax快速诊断出故障结果为2,此时发生轻微失效故障,四旋翼无人机的高度响应曲线发生轻微的抖动,调用容错控制器u1,可以很好的跟踪期望值;当执行器1在t=6s发生故障时,由DBN和softmax快速诊断故障结果为3,此时发生较轻微失效故障,四旋翼无人机的高度响应曲线发生轻微的降低,调用容错控制器u2,可以很好的跟踪期望值。
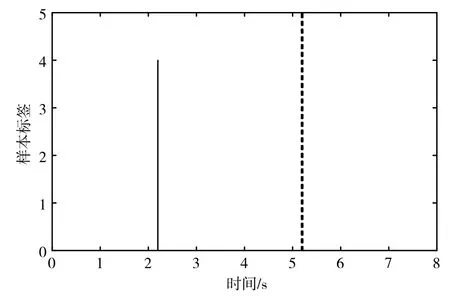
图10 DBN和softmax故障诊断图

图11 四旋翼无人机状态响应图
由图10和图11可知,四旋翼无人机的执行器1在t=2s发生故障时,由DBN和softmax快速诊断出故障结果为4,此时发生中等失效故障,四旋翼无人机的高度响应曲线发生一定程度的降低,调用容错控制器u3,可以很好的跟踪期望值;当执行器1在t=5s发生故障时,由DBN和softmax快速诊断故障结果为5,此时发生严重失效故障,四旋翼无人机的高度响应曲线发生一定程度的降低,调用容错控制器u4,可以很好的跟踪期望值。
6 结 论
本文针对四旋翼无人机的PID控制器参数通过经验试凑难以获得最优和执行器部分失效故障问题,提出了基于PID控制器参数优化的容错控制器设计方法。首先利用遗传算法离线优化PID参数,然后引入故障补偿机制,设计5个针对不同故障区间的容错控制器,使其可以通过DBN和softmax在线对故障进行区间分类来调用相应的控制器,对故障进行容错处理。仿真实验表明所提出的方法对四旋翼无人机正常飞行和执行器部分失效故障都具有很好的容错效果。
