无人机航空摄影测量在油气管道工程中的应用
2018-11-06李玮
李 玮
中国石油工程建设有限公司西南分公司, 四川 成都 610041
0 前言
无人机航空摄影测量是一种获取高分辨率数据的航测技术,具有造价低、操作灵活、机动性强、高危地区探测等技术特点,突破了传统航空摄影测量和卫星遥感测量不能完全解决的测绘时效性和性价比的难题,在工程建设中的应用效果显著[1]。近几年,无人机硬件技术、飞行控制技术和设备集成技术发展迅速,无人机航空摄影测量作为新兴航空摄影测量技术,在石油天然气行业中的应用越来越多。特别是在油气管道方面,无人机航空摄影测量为管道工程建设提供了丰富可靠的基础测绘成果,为油气管道的建设发挥了重要作用[2]。本文通过工程项目试验实例,分析无人机航空摄影测量的技术应用。
1 航空摄影
试验测区位于四川省梓潼县境内,线路长约15 km。测区地理位置为东经105°09′22″~105°12′48″,北纬31°37′35″~31°35′49″,测区平均海拔496 m,周边海拔460~580 m,相对高差120 m左右,地势起伏不大,属于丘陵平原地带。线路从西到东地面高程上升,植被较多。试验目标为线路中心线两侧各200 m范围的1∶2 000 DEM及DOM成果制作。
1.1 无人机技术指标
本次试验采用一款卓越的多功能型航拍、实时影像回传的无人机,由世界知名无人机厂商生产。该型无人机经过了大量、反复地飞行测试,具有高耐久性、高稳健性等特点,可以获取高质量的航摄像片,同时,还可以选配实时视频传输系统进行实时监控、指挥和调度工作。无人机主要性能指标见表1。
1.2 实地踏勘和航线设计
1.2.1 实地踏勘
根据试验测区的线路路由地面情况,试验组对测区现场进行了踏勘。踏勘主要任务为选择无人机的起降场地,起降场地的选择主要考虑因素:无明显障碍物,包括架空线路、高层建筑物、山岭等;无大面积水域、深沟、树林等;松软土质或低矮植被[3]。
1.2.2 航线设计
踏勘完毕后,试验组在实地进行了航线设计。本次试验按3个航摄架次飞行设计,设计航线14条,任意向飞行,飞行航高约400~500 m。航线设计图见图1。
表1无人机主要性能指标
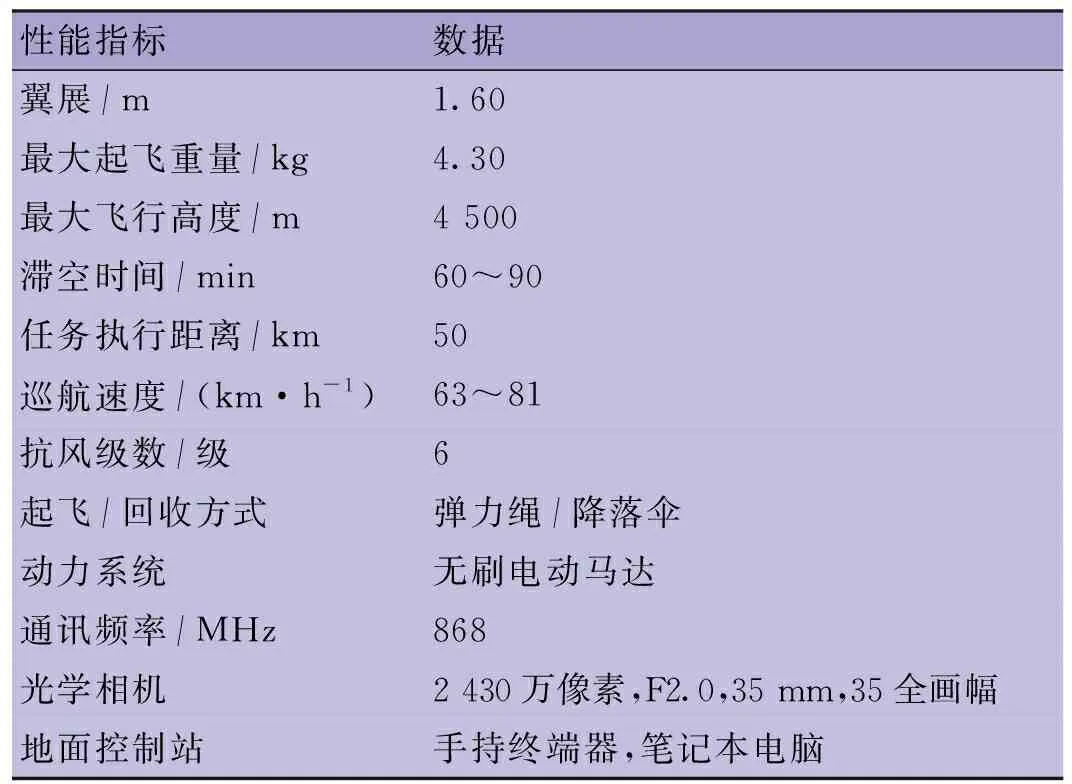
性能指标数据翼展/m1.60最大起飞重量/kg4.30最大飞行高度/m4 500 滞空时间/min60~90任务执行距离/km50巡航速度/(km·h-1)63~81抗风级数/级6起飞/回收方式弹力绳/降落伞动力系统无刷电动马达通讯频率/MHz868光学相机2 430万像素,F2.0,35 mm,35全画幅地面控制站手持终端器,笔记本电脑
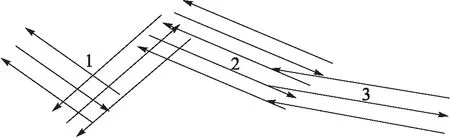
图1 航线设计图
1.3 航空摄影及质量检查
1.3.1 航空摄影
航空摄影时因气候突变,天气情况为小雨、微风,地面反射条件较差。因此,执行航飞任务时对设计航线进行了调整,将第1架次航线进行了局部微调,第2架次和第3架次的顺序对调。实际飞行航线19条,共1 145张影像,面积约9.45 km2。第1架次490张影像,第2架次262张影像,第3架次393张影像,测区接边处均有重叠影像,实际飞行航线见图2。
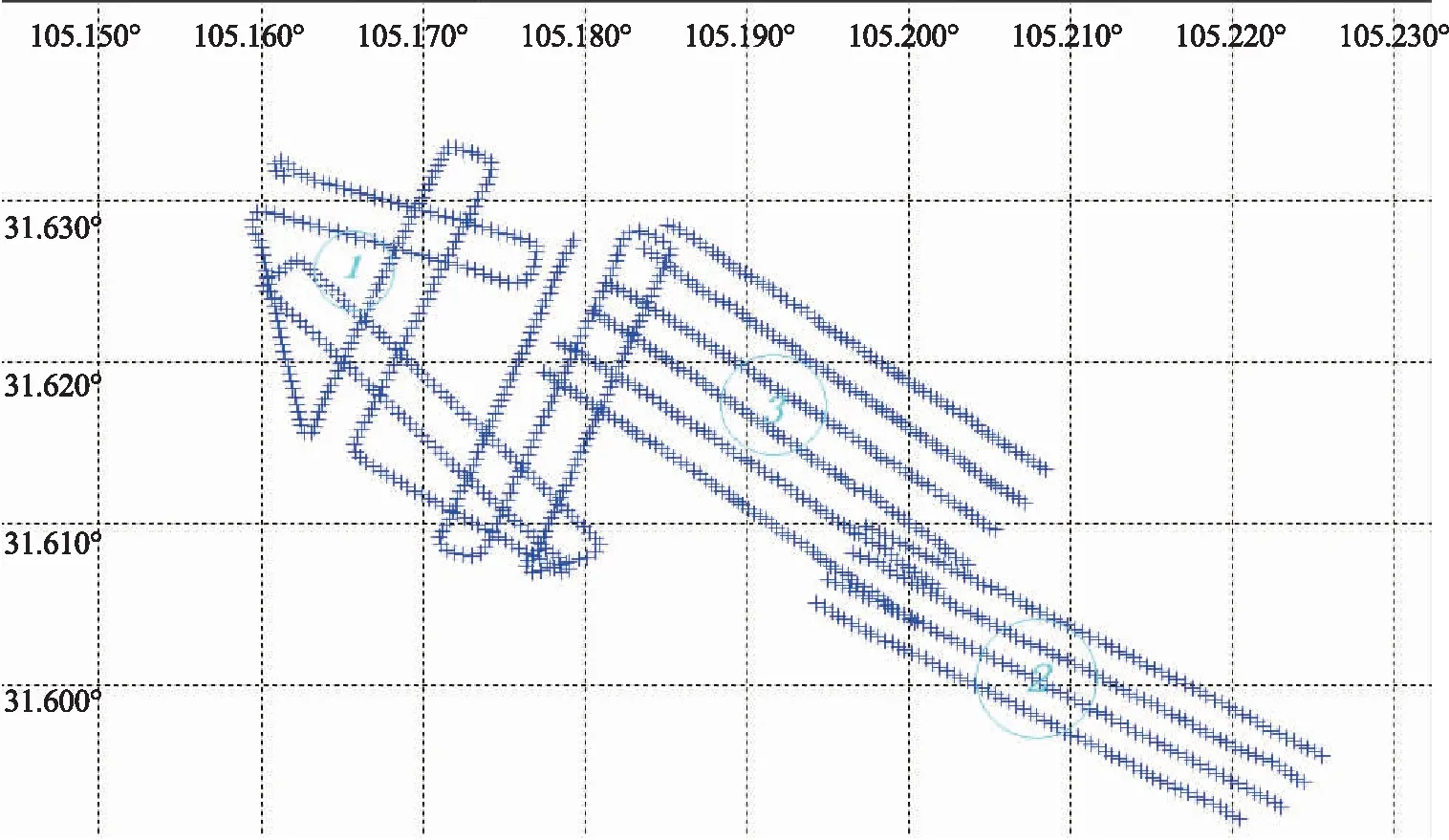
图2 实际飞行航线
1.3.2 质量检查
质量检查采用EasyMos软件,通过航飞质检功能,提取POS导航数据,对测区内影像的飞行质量进行全面检查[4]。以第3架次共393张像片质检为例,由于航摄时天气的影响,本架次个别航线重叠度和旋偏角不能满足规范要求,但与规范规定的临界值差数较小,根据以往经验,为保证连接影像的完整,本次试验对此情况忽略不计。飞行质量检查结果见表2。
表2飞行质量检查结果

最大重叠度/(%)最小重叠度/(%)平均重叠度/(%)最大旋偏角/(°)最小旋偏角/(°)平均旋偏角/(°)96.4554.2367.78160.16.18
2 像片控制测量
像片控制测量采用航线网和全野外布点相结合的方式进行,像片控制点的布设按飞行架次设计,尽量考虑在航向和旁向6片或5片重叠区域内布设像片控制点。像片控制点点位目标影像清晰、易于判别和立体量测,平面和高程控制点共用[5-6]。像片控制测量采用GNSS RTK测量方法进行,实施时GNSS RTK施测像片控制点相对于临近等级控制点的精度指标为:平面中误差不大于5 cm,高程中误差不大于10 cm。像片控制点的布设情况见表3。
表3像片控制点的布设情况
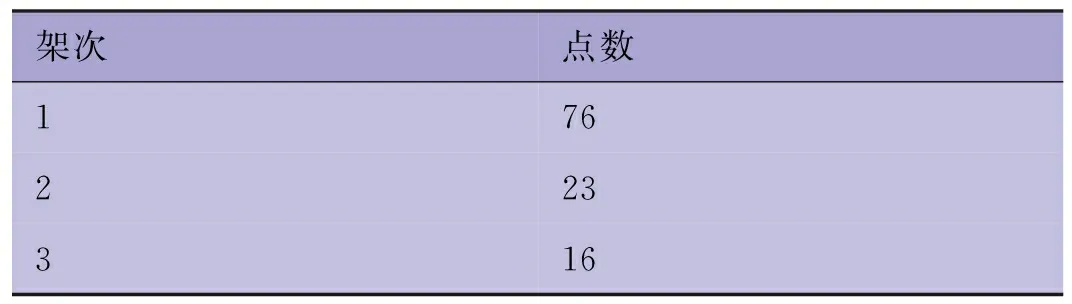
架次点数176223316
3 数据处理
数据处理采用EasyMos软件和M-DPGrid(移动式数字自摄影测量网格)系统进行,按航空摄影架次分区进行数据处理。主要内容包括:影像畸变校正、空中三角测量、DEM及DOM成果制作。
3.1 影像畸变校正
航空摄影像片经质检分析满足使用要求后,需进行影像畸变校正[7],畸变校正在EasyMos软件中进行。通过输入检校相机的畸变参数,设定输入和输出目录,批量进行各架次航空摄影像片的畸变校正,校正后的影像作为下一内业工序的输入条件,以满足空中三角测量计算和平差的需要。
3.2 空中三角测量
空中三角测量采用M-DPgrid系统,主要工作内容包括:影像自动匹配与转点、交互式编辑、区域网平差等[8]。空中三角测量工作流程见图3。
3.2.1 影像自动匹配与转点
在影像自动匹配与转点时,应注意执行程序前的参数设置[9]。本次试验任务参数设置为:每张影像标准点位个数“5”,每个标准点位上保留点的个数“3”,粗差阀值“2”(像素)。

图3 空中三角测量工作流程
3.2.2 交互式编辑
影像自动匹配与转点工作完成后,需进行粗差点自动挑选,确保每个点都是同名点的同时,还需要检查测区内是否缺点或漏点[10]。当自动计算的连接点不能满足加密要求时,需人工增加一些连接点,在模型间保证足够的连接强度。且航带间的每张像片要均匀分布的多度重叠点,以保证控制网的强度[11-12]。
3.2.3 区域网平差
采用M-DPGrid系统内置iBundle-Frame软件进行分区区域网平差。平差时应反复检查已知控制点的点位和高程精度指标,对于差值较大的已知点需在交互式编辑状态下对其点位和高程信息进行核实和检验[13]。对于自动或人工转点的点位需进行检验和调整,确认已知控制点的转点位置无误以及其他同名点无粗差后,再次进行平差,输出平差报告。以第3架次的分区为例,控制点残差统计见表4。
3.3 DEM及DOM成果制作
DEM制作是在DSM基础上进行的,通过自动滤波和人机交互,在立体模型下人工干预测区DSM格网点的高度信息[14-15]。DSM的人工干预主要体现在植被、房屋、水域、桥梁等区域,数据处理人员需根据现场地表情况和调绘数据进行处理[16-17]。DOM制作则是通过匹配的点云进行单片纠正,再进行融合拼接处理,这种方法的优点在于不易出现较大的接边差和影像物理拉伸现象,可以在最大程度上保证DOM的影像质量[18-19]。DEM及DOM成果见图4。
表4控制点残差统计单位:m

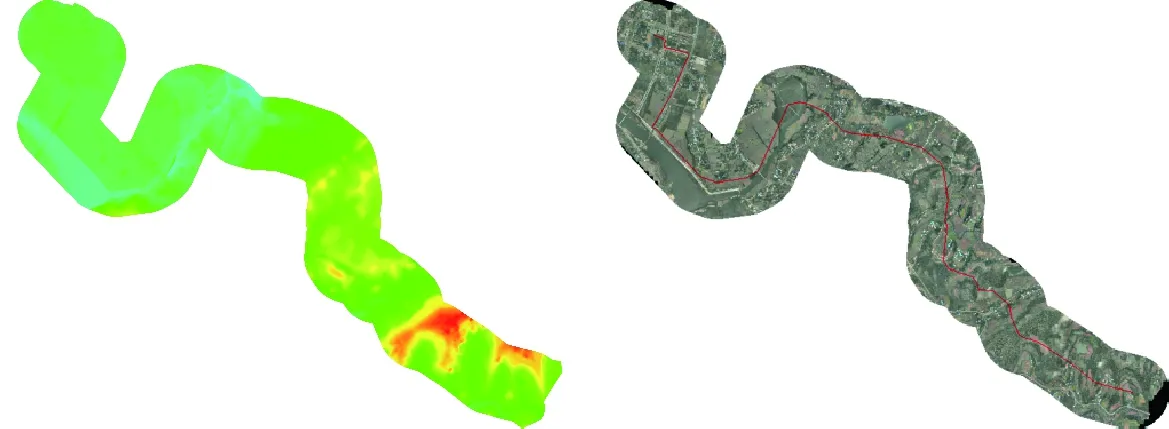
图4 DEM及DOM成果
4 精度分析
本次试验分别对影像平面位置和DEM高程精度进行了外业检验,为了整体反映航空摄影测量精度,检查点均匀分布在整个测区[20-21]。利用GNSS RTK共采集了126个地面检查点,计算结果表明试验成果的平面位置精度较高,而高程精度偏低。精度较高的检查点主要集中在测区西部平坦地区,精度较差的点则主要集中于东部山区和中部水域附近。GNSS RTK检查结果统计见表5。
表5GNSS RTK检查结果统计
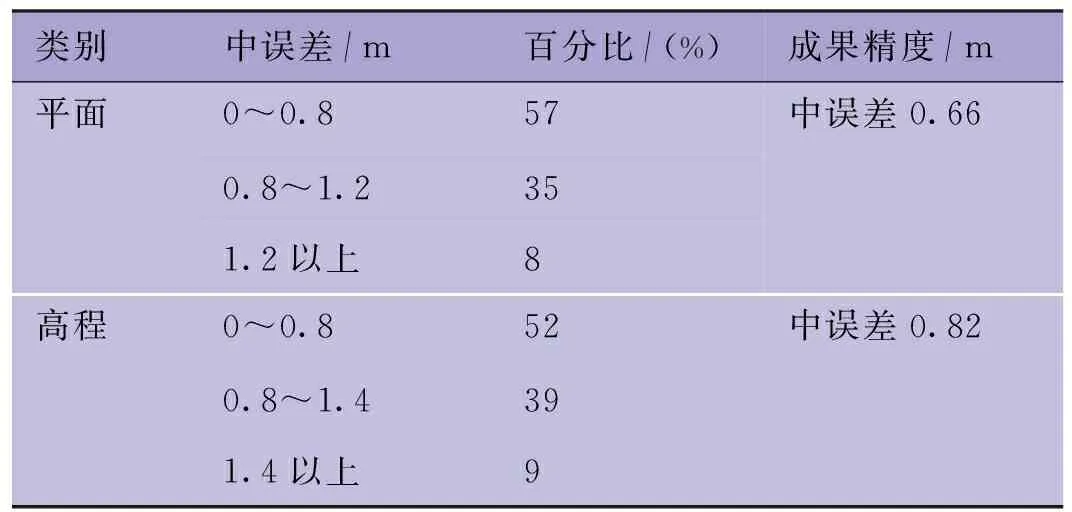
类别中误差/m百分比/(%)成果精度/m平面0~0.8570.8~1.2351.2以上8中误差0.66高程0~0.8520.8~1.4391.4以上9中误差0.82
5 结论
无人机航空摄影测量在应用时,主要应考虑:无人机设备性能和参数;空三加密过程变形度;地物配准程度;作业采集精度;出图、处理精度等。测区天气情况对无人机航空摄影质量具有决定性的作用,航空摄影时可根据实际情况对规划航线进行调整;软件中个别超限的质检指标可忽略;内业处理时采用自动化程度高、处理效率和质量好的全数字摄影测量软件,可以取到事半功倍的效果。本次试验结果表明:无人机航空摄影测量在油气输送管道工程测量中的应用是可行的,试验成果的质量和精度满足GB/T 50539-2009《油气输送管道工程测量规范》对线路带状地形图、正射影像图的精度要求。
