基于总变分(TV)正则化约束的微地震井下速度模型校正
2018-11-05蒋星达王仔轩陈晓非
蒋星达, 张 伟, 王仔轩, 李 光, 陈晓非
(1.中国科学技术大学 地球和空间科学学院,合肥 230026;2.南方科技大学 地球与空间科学系,深圳 518055;3.辽河油田勘探开发研究院,盘锦 124000;4.东方地球物理公司 辽河物探处开发地震服务中心,盘锦 124000)
0 引言
在水力压裂条件下,微地震监测裂缝成像精度受检波器的布设位置、拾取误差、速度模型准确度、定位算法以及解释算法等因素的影响,其中速度模型的准确度对裂缝的定位结果具有重大影响[1]。在井下监测过程中,声波测井数据经常被用于构建井中监测初始速度模型[2]。在地下地质条件较为简单的地区,可以利用垂向一维层状速度模型近似研究区域速度模型作为初始速度模型,这种简化的速度模型在很多地区得到了成功地应用[3-4]。然而,获取的声波测井资料频率范围为几百赫兹到几千赫兹,而微地震信号相对频率较低,且获取的声波测井信号传播方向主要沿井筒方向,不能反映地层横向速度变化。因此,获取的初始速度模型通常需要根据射孔点信号进行校正。
针对速度模型的校正,许多学者根据初始速度模型确定层位信息,利用各种算法校正各层速度值的大小。Oye等[5]提出通过拟合P波或者S波的走时信息获得对应的速度模型和震源位置;Pei等[4]提出同时反演速度模型和射孔信号发震时刻的方法,通过反演起始时刻获得了走时信息;Zhou[6]提出以某个地震台站记录到的信号作为参考信号,计算其他台站信号与该信号记录的到时差作为观测数据,计算地震事件位置;Zhou等[7]利用同一地震事件不同检波器的P波到时差和同一检波器的P-S波到时差作为观测数据,在目标函数中去掉了发震时刻的影响。利用到时差作为观测数据,可以有效解决起始时刻不准确带来的问题。
目前,微地震速度模型校正的许多方法都是对速度模型的层位深度或者速度值大小进行校正,这些方法没有考虑到声波建立的初始速度模型层位个数、层位深度以及速度值大小均存在误差的情况。为了避免由于声波测井曲线的误差而导致的速度模型误差问题,笔者提出一种不依赖于声波测井曲线、仅使用射孔信号数据校正速度模型的方法。
针对无法准确知道射孔信号的初始时间问题,我们利用不同检波器的P波走时差、S波走时差和同一检波器的P/S波走时差作为观测数据。以均匀但是具有细层间隔的速度模型作为初始速度模型,避免了采用声波测井数据进行层位划分。除此之外,引入总变分正则化约束,对一维速度模型进行反演校正。总变分(TV)正则化约束方法广泛地应用于图像的去噪领域[8],在去除噪声的基础上能够保留图像的边缘信息和不连续性,达到保留图像纹理细节的目的。地下介质具有明显的成层性,在地球物理反演过程中利用TV正则化约束,相对于Tikhonov约束,可以更好地保护介质的边缘信息。井下微地震监测中的一维速度模型具有明显的成层性,利用TV正则化约束速度模型,在拟合射孔信号走时差的基础之上保护了层位边界,最终获得的速度模型具有不连续的速度值大小。这样根据速度值的不同可以分辨层位,同时确定了层位的个数、层位深度和各层速度值的大小。
1 方法原理

(1)
针对同一个射孔信号,第j个检波器和第i个检波器的P波到时差表示为式(2)。
(2)
同理,可以计算出第j个检波器和第i个检波器的S波到时差为式(3)。
(3)
第j个检波器P波信号和S波信号的到时差式(4)。
(4)
根据式(4)可以明显看出,检波器的到时差即为走时差,与射孔信号的发震时刻没有关系。利用以上得到时差信息,可以构建如下观测函数:
(5)

一维层状速度模型在速度值上表现为“阶梯性”,利用具有保持边界属性的总变分(TV)约束,能够更加有利于一维层状速度模型的反演[9]。一阶TV正则化约束项用相邻细层的速度差表示为:
(6)
(7)
其中:m表示反演的速度模型参数;n表示速度模型参数的个数;Lm近似为反演模型的一阶偏微分近似[10]。最终的目标函数表示为式(8)。
OF=‖G(m)-d‖1+α‖Lm‖1
(8)
其中:G(m)表示反演速度模型获得的走时差;d表示观测得到的到时差;α表示权重因子;‖Lm‖1表示TV正则化约束项。
笔者利用田玥等[11]提出的快速两点间射线追踪方法,计算层状速度模型中源到检波器的走时信息。基于模型L1范数的问题可以采用内点方法(interior points solver)求解[12],这里借助于CVX软件包[13]求解目标函数。
2 人工合成数据测试
对四层速度模型进行了测试。观测系统由20级布设于垂直观测井的检波器构成,检波器之间的间距为10 m。射孔点与检波器的水平距离为500 m。初始速度模型由10 m 间隔,每个细层中P波或S波速度值大小均相同的细层构成。反演过程中,我们进行了20次迭代优化目标函数。

图1 四层速度模型反演结果Fig.1 The inverted result of a four-layer velocity model(a)P波:3 500 m/s、S 波:1 750 m/s; (b)P波:4 000 m/s、S 波:2 000 m/s;(c)P波:4 500 m/s、S波:2 250 m/s
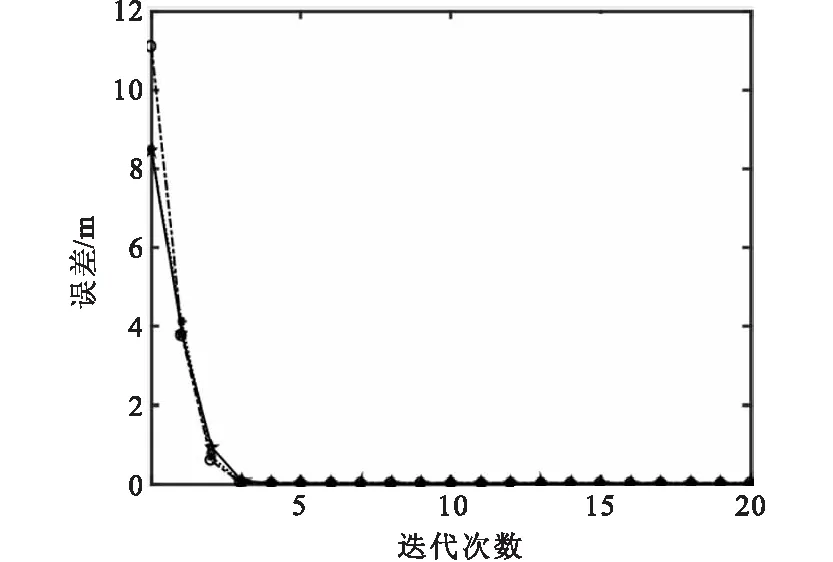
图2 三种初始速度模型目标函数收敛速度Fig.2 The convergence rate of three initial velocity models
图1测试了三种不同初始速度模型的校正结果(实线表示真实速度模型,虚线表示初始速度模型,点线表示反演速度模型)。从图1可以看出,最终反演结果受初始速度模型影响较小。反演的各细层速度值与真实速度值的偏差都不超过1%。从图2可以看出(实心圆表示图1(a),五角星表示图1(b),空心圆表示图1(c),经过5次迭代以后,目标函数已经收敛接近于“0”。说明利用本文发展的方法,可以快速地获得层状速度模型的层位个数、层位深度以及各层速度值的大小。
针对图1中的四层速度模型,测试了在较少检波器情况下速度模型的校正情况。图3(a)显示了四层模型在10个检波器监测情况下速度模型的校正情况。通过反演的速度模型可以看出,存在检波器的层位(前10层),反演的速度模型各细层偏离真实速度值的大小不超过2%,能够通过反演的速度值大小划分层位,获得各层速度值。不存在检波器的层位(后10层),不能够分辨出正确的层位深度,这是由于单个射孔信号的观测数据包含的信息不足造成的。为了增加地震射线路径在速度模型中的覆盖程度,通过采用多个射孔点数据同时反演以增强对细层的分辨能力。图3(b)表示采用三个射孔数据,各射孔点水平距离大约为25 m,的速度模型校正结果。各细层偏离真实速度值的大小均不超过2%,表明增加射孔点的个数,增加了射线路径在速度模型中的覆盖程度,有利于反演的速度模型准确性地提高。为了模拟获得实际信号过程中的随机误差,在合成的到时信息中加入平均值为“0”,标准差为 1 ms的高斯噪声,测试本文方法在含噪声数据中反演的稳定性。图3(c)表明添加噪声后反演的速度模型,含有噪声情况下反演的P波和S波速度模型各细层偏离真实值均不超过2%,表明该方法具有良好的抗噪性,在噪声情况下仍然能够获得正确的层位深度以及各层速度值的大小。
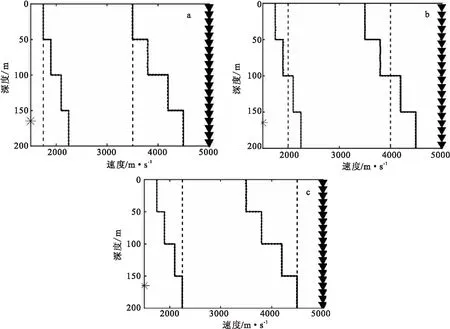
图3 十个检波器速度模型校正结果Fig.3 The inverted results of 10-receiver velocity model(a)单个射孔点校正结果;(b)三个射孔点没有噪声数据校正结果;(c)三个射孔点存在噪声数据校正结果。
3 实际资料处理
将该方法应用到辽河油田某水力压裂监测资料中,测试该方法的实际应用效果。采用辽河油田某次水力压裂单级射孔数据,进行速度模型校正。该次压裂具有三簇射孔段,射孔点位于检波器的下方。三个射孔点布设于水平井距离地面大约1 550 m的深度左右,水平间隔大约为25 m。井中检波器组由10级三分量检波器组成,间隔为10 m,布设于距离地面1 425 m~1 515 m深度。射孔段与检波器的水平距离大约为400 m。首先通过声波测井曲线划分速度模型(图4(a)),通过该速度模型对射孔点进行重定位,发现三个射孔点在不考虑方位角差异的二维垂直平面上的重定位误差在350 m~430 m范围,存在较大误差(表1)。通过本文方法利用间隔为10 m、垂向深度为200 m的均匀细层初始速度模型,结合射孔数据对速度模型进行校正,获得多层速度模型(实线表示反演速度模型,图4(b))。利用校正的速度模型对射孔点进行重定位,发现重定位后三个射孔点,在不考虑方位角差异的二维垂直平面上的定位误差分别为10.1 m、2.6 m以及8.1 m,大大缩小了射孔点的重定位误差(表1)。说明利用本方法可以有效地获得地下速度模型的层位信息和各层速度值的大小,同时能够有效地减少射孔点的重定位误差。利用该速度模型对此次水力压裂微地震事件进行定位处理,获得的定位结果如图5所示(不同颜色代表不同压裂段)。由图5可以看出,微地震事件之间具有良好的连续性,能够反映水力压裂人工裂缝的主要延伸方向。由于水力压裂产生的人工裂缝预期主要沿最大主应力方向延伸,将微地震定位获得的裂缝方位角与地质资料提供的该地区最大主应力方向进行对比(图6),发现两者具有高度的一致性,验证了此次微地震监测成果的正确性,说明本方法在真实微地震监测中具有良好的应用价值。
4 结论
为了获得井中微地震监测速度模型的层位个数、层位深度以及各层速度值大小,我们采用P波 走时差、S波走时差、P/S波走时差作为观测数据, 在TV正则化约束条件下校正目标层位速度模型的 层位信息和速度值的大小:

图4 两种速度模型对比Fig.4 The comparison between two velocity models(a)根据声波测井曲线划分的速度模型;(b)根据本文方法反演获得的P波速度模型和S波速度模型
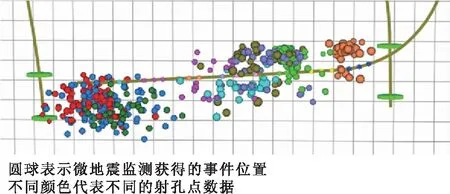
图5 水力压裂微地震监测定位结果Fig.5 The fracture mapping of the microseismic monitoring in the hydraulic fracturing

射孔编号声波测井速度模型校正速度模型ΔH/mΔZ/mΔL/mΔH/mΔZ/mΔL/m1-2.3350.85357.99.991.4510.12137.81350.82376.90.902.412.63-27.81422.24423.27.513.028.1
ΔH表示水平误差,ΔZ表示垂直误差,ΔL表示总误差
1)该方法有效解决了射孔信号起始时间未知对速度模型反演的影响。同时用均匀细层速度模型作为初始速度模型,有效避免了声波测井信息不准对速度模型层位深度和速度值大小的影响。
2)利用射孔数据校正速度模型过程中,在TV正则化约束条件下,有效地保护了速度模型的层位信息,同时获得了层位深度和各层速度值的大小。
3)合成数据和真实资料均显示,利用本文方法反演获得的速度模型与真实速度模型更加接近,可以获得更好的射孔事件重定位结果,显示该方法在微地震监测资料处理中具有良好的实用性。

图6 最大主应力方向和裂缝方位角对比
Fig.6 The comparison between the maximum principal stress directions and the azimuths in the microseismic monitoring
(a)地质资料提供的最大主应力方向;(b)微地震监测获取的裂缝方位角
