基于全自动驾驶技术的南京地铁7号线高架车辆段设计
2018-11-02王亚丽
王亚丽
(中铁上海设计院集团有限公司,200070,上海//高级工程师)
1 项目概况
南京地铁7号线为南京市首条全自动驾驶模式的线路,位于长江南岸,定位为东北—西南向的大运量局域线。其南起西善桥,北止仙新路,途经雨花台区、建邺区、鼓楼区和栖霞区,线路长约35.6 km;设站27座,含换乘站13座,均采用地下敷设方式,平均站间距约1.35 km。
南京地铁7号线全线按一段一场设置,在起点设西善桥停车场,在终点设马家园车辆段;利用2号线所街主变电所和3号线滨江路主变电所供电,7号线主控制中心设在马家园车辆段内。采用B型车、6辆编组,设计最高时速为80 km/h,DC 1 500 V接触网供电;初/近/远期均采用大小交路,高峰小时开行对数分别为20、24、30对。本线场段分布及交路形式见图1。

图1 南京地铁7号线场段分布及交路示意图
马家园车辆段为定修段,接轨于7号线线路北端仙新路站,段址位于南京铁路枢纽南京东站既有宁芜出发线、宁东环到线合围地块内,选址示意图见图2。主要工程内容包括总平面、工艺、站场、路基、桥涵、房建(含装修)、给排水,以及消防、动照、暖通、综合管网、道路、围墙、绿化等。
由于车辆段用地被铁路线包围,对外交通条件较差,出入口均需上跨既有铁路;出入段线需下穿南京东编组站、京沪铁路、仙新路并上跨宁东环到线后再以大坡度引入车辆段;此外,车辆段周边要考虑铁路限界,场坪与既有铁路线高差较大,受控因素多、用地局促。经与地面方案进行多方面比较论证后,马家园车辆段采用架空方式,即出入段线上跨宁东环到线后以平坡入段,将轨行区置于盖板上,其他生产辅助房屋置于盖板下,这样有利于改善出入段线和车辆运营条件,有利于土地集约利用。同时,为了改善盖下通风采光,在盖板上因地制宜设置若干采光天井,并引入光导管等先进技术,将盖下空间打造成集生产、办公、生活、休闲、绿化为一体的“地下城市”。
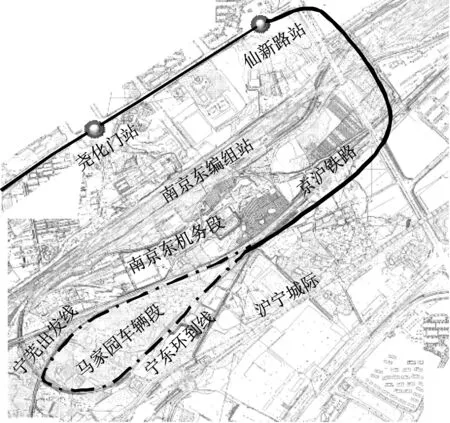
图2 马家园车辆段选址示意图
2 全自动驾驶车辆段总平面布置形式
全自动驾驶技术在国内外得到了快速发展,在增加运能、提高系统效率、改善乘坐舒适度、节省人力资源等方面具有显著优势。基于全自动驾驶技术的车辆段与常规车辆段不同的是,它需考虑全自动运行区和非自动运行区的划分,并设置转换轨用于信号模式的转换。一般将停车列检库、洗车库线群纳入全自动运行区,将周月检库、定临修库、镟轮库、调机工程车库线群纳入非自动运行区,两个区域不宜间隔布置,并进行物理分割。
总平面布局通常有以下几种形式:
(1)顺接布置,转换轨兼作牵出线,如图3所示。停车列检库和检修库并列顺向布置,在出入线一侧设牵出线兼转换轨。这种布置形式在传统驾驶模式下,列车可以从正线直接驶入停车列检库或检修库,调车工艺顺畅,折角次数少,在地形条件允许的情况下应优先考虑。但在全自动驾驶模式下,由于列车不能直接从正线(全自动运行区)驶入检修库(非自动运行区),必须经过段内信号模式转换,因此列车先自动进入停车列检库,再折返至转换轨,最后运行至检修库,总共需经过2次换向,1次模式切换。同理,检修结束后返回停车列检库待命的列车需经过1次换向、1次模式切换。此外,如果运营单位能够充分信赖全自动驾驶列车的自检功能,即列车不需要每日列检,而是双日检或四日检,那么可将停车列检库分为两部分:一部分仅用于停车,无需分区或设置检查地沟;另一部分兼顾停车和列检,划分保护区,并设置检查地沟。
图3 北京地铁17号线歇甲村车辆段布置示意图
(2)倒装布置,转换轨兼作牵出线,如图4所示。停车列检库和检修库逆向倒装布置,牵出线兼作转换轨,全自动运行区与非自动运行区相互独立,界限分明。这种布置形式在传统驾驶模式下,进入检修库的列车都需要在牵出线上折返,调车效率低,但该形式布置紧凑,占地面积较小,在用地条件受限的情况也经常采用。在全自动驾驶模式下,列车从正线驶入检修库需经过1次换向、1次模式切换;检修结束返回停车列检库需经过2次换向、1次模式切换。因此,总的换向和模式切换次数与顺接方案相同。

图4 上海轨道交通10号线吴中路车辆段布置示意图
(3)顺向纵列式,走行线兼作转换轨,如图5所示。停车列检库和检修库顺向纵列布置,走行线兼作转换轨,全自动运行区与非自动运行区一前一后相互独立,界限分明。这种布置形式在传统驾驶模式下,列车下线通过走行线可直接进入检修库,工艺顺畅。在全自动驾驶模式下,列车从正线驶入检修库只需在走行线切换1次模式,无需换向;检修结束返回停车列检库需经过1次换向、1次模式切换。可见,纵列式布置折返次数少,可较好地满足初期有人—无人驾驶过渡,且分区鲜明,但这种形式对用地长度要求较高。
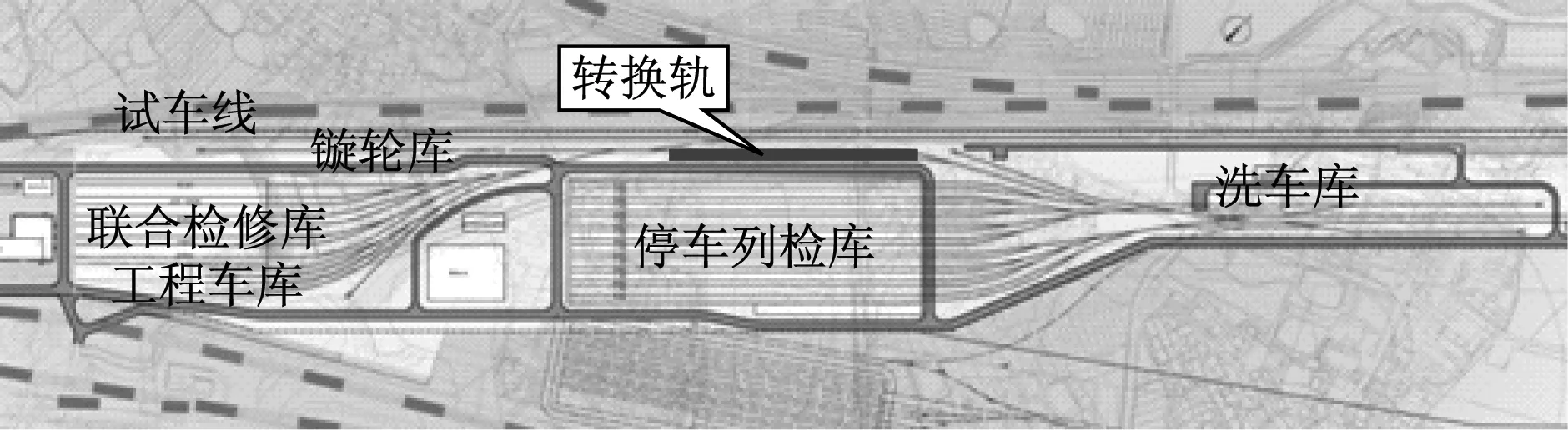
图5 顺向纵列式车辆段布置示意图
(4)顺接布置,检修库前设转换轨,如图6所示。停车库(新加坡TEL车辆段仅用于停车,不作列检)和检修库并列顺向布置,在检修库每股道前留有一列车长加安全距离的有效长作为转换轨,需要检修的列车可以直接从正线运行到库前转换轨,再经信号转换后驶入检修库,不需换向。这种布置形式适用于国外列车编组较小的情况,且由于与国内检修体制的不同,停车库一般兼作列检,需要考虑检查地沟和分区隔离。马家园车辆段总平面方案引用并优化了这种形式,即在检修库岔群前集中设置一处转换轨,而不是对应每条检修线设置。

图6 新加坡TEL车辆段布置示意图
3 全自动运行区工艺设计
基于全自动驾驶技术的车辆段在满足常规车辆段检修工艺的基础上,还应满足下列需求:
(1)设置全自动运行区和非自动运行区,两个区域划分界面清晰并配有物理隔离措施。
(2)对全自动运行区和非自动运行区的转换作业,在牵出线或检修库前配置转换区段。转换区段设于全自动运行区内,配套设置司机登乘平台,并具备司机上、下车的安全措施。
(3)停车列检库除了停车功能外,还兼顾日检功能,按100%列位设置检查地沟;防护分区的划分兼顾安全与效率的原则,通常每2~3股道设置为1个防护分区,采用防护围栏分隔。
(4)停车列检库内应满足信号自动停车的安全防护距离要求,并宜满足相关测试的长度要求,即列车停车点至车档(不含车档长度)大于等于15 m,库内两列车间距大于等于20 m。
(5)对司机在停车库列检库的上、下车作业,应配套设置司机登乘平台,并具备司机上、下车的安全措施(包括从非自动运行区域至登乘平台的通道);为保证司机上、下车的绝对安全,司机通道与一般作业人员通道宜严格分离,互不交叉。
(6)为了保证工作人员进入停车列检库各分区的安全和便捷,需设置地下横向通道。
(7) 洗车库设于全自动运行区域,并满足自动洗车的要求。
4 马家园车辆段总平面布局
4.1 盖上平面布局
盖上总平面呈并列尽端式布置,停车列检库(34列位)与洗车库为全自动运行区,位于场地北侧,停车列检库中间设一条纵向采光天井;联合检修库由周月检库(3列位)、定临修库(2列位)、静调库、吹扫库等组成,为非自动运行区,位于场地南侧,岔群前设一列位转换轨,一端设司机登车台;镟轮库及材料棚平行布置于联合检修库南侧,材料线尾部同时考虑新车装卸;工程车库布置于停车列检库咽喉东南侧;试车线长约1 150 m,设于场地东南侧,采用连续梁上跨南京东编组站环到线。盖上总平面示意图见图7。

图7 马家园车辆段盖上平面布置示意图
车辆段设3个出入口,其中2个通过匝道上跨铁路线与市政道路连接,1个利用既有涵洞(主要供公安派出所使用)。
大库尾部为开放性的入口广场,与大库区盖下半开放的观景庭院及咽喉区盖下私密性的内庭院形成一体化的景观主轴,完成空间过渡。
4.2 盖下平面布局
考虑车辆段处于铁路线包围的夹心地块,直达此处的市政道路较少,地面交通不便,声环境较差,因此盖下空间不适合作为住宅、商业、仓储等类似大客流车站开发性质的功能。故考虑盖板下部空间主要作为车辆段自身使用,以及为地铁内部使用做预留,例如会议用房、材料仓库等对选址没有限制并对采光要求不高的一些功能用房。
盖下地面标高结合现状地形及盖下房间功能特点,根据厂区土石方平衡原则,并考虑百年洪水位要求,将场坪作阶梯状处理,盖下西侧区域以挖方为主,室内地面标高约29.5~30.8 m,东侧区域以填方为主,室内地面标高约27.0 m。
盖下总平面示意图见图8。盖下面积约13.5万m2,长度方向约770 m,宽度方向约280 m,盖下通风采光条件差,根据盖上整体布局以及盖下消防设计原则,在盖上局部单体与单体、单体与道路之间和线路限界后的空白区域设置天井,同时采用光导照明系统与景观设计相结合的方式,最大限度地改善盖下自然通风与采光条件。

图8 马家园车辆段盖下平面布置示意图
盖下空间结合盖上各单体功能布局特点布置:物资总库设置在联合检修库南侧、材料堆场盖板下,并设置1部货梯,便于物资搬运;7号线控制中心、车辆段综合维修和办公房及食堂等设置在停车列检库及联合检修库西部盖下,与辅跨用房通过垂直交通设施连接,其流线简短,工作交流方便快捷。公安派出所位于盖下东端出入段线桥下,以北侧铁路涵洞作为出入口,与车辆段功能区域隔开。
在联合检修库南侧与工程车库尾部天井边沿布置间休室,以充分利用天井采光与通风,提升周边环境。同时设置有适量的运动休闲场所,供车辆段内部员工休憩放松。
预留区域主要位于岔区盖下,近期做简单绿化,可通过1个单独的汽车匝道及1个地面出入口到达此区域。
5 高架车辆段特殊设计
5.1 盖体及房屋结构
盖体、盖上、盖下房屋结构结合车辆段各功能分区、建筑布局以及不同的工艺设备需求,合理选择结构形式及基础形式。停车列检库、联合检修库的跨度大,故选用型钢梁加钢骨架轻型板的结构体系;其余库房及盖体跨度约为15 m,故采用整体现浇混凝土框架结构。针对各库房不同设备基础的要求及体系,个别如地坑式架车机基础、不落轮镟床基础均设置独立框架,以避免出现结构不规则的情况。为减小盖体震动对盖下有人区域的影响,对结构采取了相应的措施。大库盖下主要为办公区域,采用了双层屋面板;间休区域采用双层屋面板并设置独立基础,与盖体完全分离,有利于减震降噪。
5.2 盖上排水
盖板上采用雨水斗排水方式,道路区域每间隔约15 m设置1处雨水斗,由建筑面层找坡。轨道区域按最多3股道(横向间距约15 m)设置1处雨水斗,由结构面层找坡。雨水斗收集盖上排水后,沿立柱设置雨水立管排至盖下地面雨水系统。
5.3 盖下通风采光
结合盖上功能布局与线路走向特点,在停车列检库中部,停车列检库与联合检修库之间,咽喉区轨道限界之余的空地上设置采光通风天井,同时根据盖下单体布置特点,在建筑入口、重要的人员办公空间、餐厅、景观节点等布置适量的光导管进行辅助照明,极大地改善了盖下环境,达到了深度节能减排的效果。
5.4 盖下消防
盖下房屋大都为多层工业建筑(派出所、间休室为民用建筑),耐火等级为二级(控制中心为一级),火灾危险性等级为丁、戊类,根据GB 50014—2014《建筑设计防火规范》,工业建筑与民用建筑之间防火间距不小于10 m。盖下综合楼、间休室、派出所等单体防火分区按不大于5 000 m2设计,物资库防火分区按不大于3 000 m2设计。每个防火分区至少设2个安全出口,疏散至盖板外或盖板下的开敞空间。整个车辆段共设3个出入口与市政道路连接。盖下单体设消防环道,单体长度大于150 m设穿越建筑的消防车道。消防道路中心线距离小于160 m。消防车道顶部开口面积达到车道面积的25%。盖板耐火时间为3 h。设置天井优化自然采光通风与排烟,天井处防火分隔:楼板交接处设大于等于1.2 m的高实体墙或设宽度大于等于1.0 m的挑檐。
6 结语
全自动驾驶技术是未来轨道交通发展的方向,也是未来地铁建设的首选模式,南京地铁7号线无人驾驶线路在此背景下应运而生。
马家园车辆段是南京首个全自动驾驶的车辆段,由于受用地条件限制,经权衡比较后采用了高架形式,即将大库及轨行区置于盖板上,综合楼等配套设施位于盖板下,在有限的用地范围内较好地实现了全自动运行、生产、办公、生活等基本功能。同时,考虑到该车辆段代表南京地铁前沿技术和工艺水平,承载了企业文化展示的需要,对建筑外立面和景观进行了适度超前设计,体现了先进性、生态性和体验性的理念,未来一段时间将成为业内的标杆项目。
此外,综合楼、物资库、间休室、公安用房等置于工业厂房盖板之下,尚未有规划、消防等方面的规范可依;间休室位于联合检修库咽喉区,会产生震动与噪声干扰;盖下部分房间无法直接采光通风,影响了室内环境。本案例在上述几方面作了积极尝试,其应用效果尚待实践检验。
