数字微流控生物芯片的动态重构型功能模块设计
2018-11-02王鹤
王 鹤
(河南工程学院 机械工程学院,河南 郑州451191)
0 引言
数字微流控生物芯片的出现,打破了生化检验在传统实验室中操作繁琐、成本高、耗时长等发展瓶颈,并对其向微型化、集成化、自动化与便携化方向发展起到了重大推动作用。介电湿润是数字微流控技术中最常见的液滴驱动方式之一。通过按次序地对电极施加电压,数字微流控技术可在二维阵列结构上独立地控制多个样本或试剂微液滴完成各种基本操作(如分配、输运、存储、合并、混合、分离与检测等),以实现相应的生化检验分析[1,2],如图1(a)所示。样本试剂消耗小、成本低廉、检测灵敏度高以及重复使用等优势使其在生物医学、分析化学、药物诊断、食品安全以及环境监测等领域都有着广泛的应用[3,4]。
在生化检验分析中,生物样本对很多因素(如环境、温度等)都非常敏感,难以在片上保持最佳的临床(如床边检测)或实验室环境。所以,为了确保检验结果的完整性,在满足约束(包括资源约束和时序约束)的前提条件下,要实现生化检验中各样本和试剂操作的并行处理达到最大化,进而减少样本液滴在片上的操作时间,以使生化检验完成时间最小化。然而,二维电极阵列的尺寸(即资源约束)以及生化检验中各操作之间的功能依赖性(时序约束)限制了片上并行操作的数量。这使得传统数字微流控生物芯片的全定制设计技术已经远不适用于大规模的生化分析与检验。因此,模仿超大规模集成电路(VSIA)的设计方法,krishnendu Chakrabarty[5~8]在芯片系统中引入计算机辅助设计,采用自顶向下的方法设计数字微流控生物芯片,优化了芯片结构,减少了人为干预,同时提高了芯片的利用率及生产效率。
实现上述目标的主要方法就是对数字微流控生物芯片实施架构级调度和几何级布局。架构级调度包括液滴操作调度和资源绑定,而几何级布局包括功能模块(如混合器、稀释器及存储单元等)布局和液滴寻址。所谓的功能模块其实是一种虚拟设备,由若干个相邻电极组合而成,可完成液滴混合、稀释和存储等功能,具有可重构性的特点。混和/稀释器就是其中的一种,通过2×2、2×3或2×4电极阵列的组合,可形成不同的混合/稀释功能模块,如图1(b)所示。许多学者利用各种算法对数字微流控生物芯片进行了架构级调度和几何级布局的研究。但在以往的研究中,通常用于液滴操作的功能模块的形状均是长方形,而且模块形状及位置在算法运行过程中是固定不变的,这在很大程度上限制了一定时间段内液滴并行操作的数量。因此,打破数字微流控生物芯片常规综合设计方法,本文采用一种动态功能模块的设计方法,使用于完成某个液滴操作的功能模块根据不同时间段内空闲电极的分布及数量实时改变其形状及位置,以实现最大限度的液滴操作并行处理;并提出了一种计算方法用来确定任意形状的功能模块完成液滴操作的时间。

图1 数字微流控生物芯片
1 生化检验模型及系统综合问题描述
数字微流控生化检验中,液滴操作步骤可以看作是一系列具有先后次序的操作,这一问题通过有向图模型进行描述,如图2所示。假设从储液池生成2种样本液滴Si(i=1,2)、3种试剂液滴Rj(j=1,2,3)和1种缓冲液,用I表示液滴生成操作。在后续操作中,为完成相应的酶化验,需要将某种样本液滴Si和试剂液滴Rj相互混合。液滴生成操作的时间主要由系统参数决定,而液体的流动特性对其几乎没有影响[9]。在生化检验中,往往要求液滴体积保持相同,那么在液滴混合操作之后都要进行分离操作,因此这里液滴混合操作的完成时间均已包含分离操作的时间。液滴混合之后,需要对其进行生化反应结果的检测,即酶测定。任何液滴基本操作的执行都需要一定的资源需求(即电极数量),这里的资源需求包含可重新配置的资源需求P和不可重新配置的固定资源需求Q,其中用于液滴输运、合并、混合以及分裂操作的资源需求属于P,而用于液滴生成和液滴检测操作的资源需求属于Q。
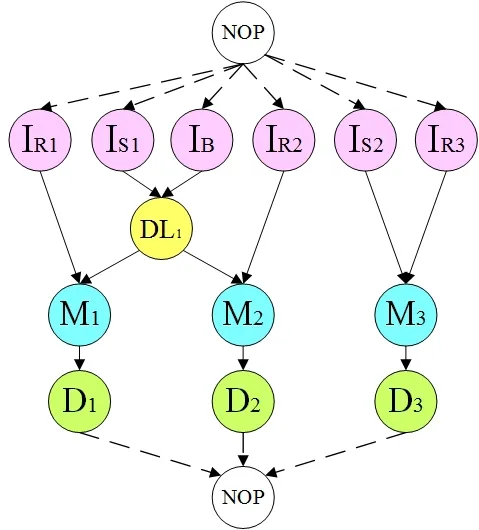
图2 多元生化检验有序图模型
图2中每个节点代表一个操作,共有15项操作任务,各节点用vi(i=0,1,2,…,14)表示,包含6个生成操作、1个稀释操作、3个混合操作和3个光学检测操作,并且设置了两个没有任何液滴操作的空节点NOP,即v0和v14。该有向图模型可用G(V,E) 表示,节点集V={vi:i=0,1,2,…,14},边集E={(vi,vj): i,j=0,1,2,…,14}用来表示两个液滴操作的前后依赖关系,即必须在操作vi结束后才能开始执行vj。为每个节点均设置一个权重ωi,表示操作vi的持续时间。相比液滴生成、混合、检测等操作,液滴移动操作的时间极短,可忽略不计,因此有向图模型中两个节点之间的边权重设置为0。L表示模块库,包含各种不同的功能模块,即混合器和稀释器等;操作与功能模块之间的资源绑定用函数B:V→A表示,其中A是来自于模块库的用于资源绑定的各功能模块集合。
数字微流控生物芯片完成生化检验的系统综合问题可分解成四个方面的内容:1)资源绑定,即从模块库中挑选一个或多个功能模块Ma×b,将其配置给任一操作vi;2)操作调度,即在资源绑定和资源/时序约束的前提条件下,确定每个操作vi的开始时间;3)操作模块的几何布局,即在m×n二维电极阵列上为每个操作vi对应的功能模块找到合适的物理位置;4)液滴寻址,即在功能模块之间或功能模块与储液池/废液池之间规划液滴移动路径。
目前,在相关研究中,模块库所包含的各功能模块都是长方形的。为防止液滴在功能模块上执行操作时与其他液滴发生意外混合,两液滴之间至少要保持一个电极的间距。因此,在功能模块的周围设置一个电极宽度的隔离区将其包围,具体如图1(b)所示的网格区域。功能模块实际在片上所占据的尺寸要比其自身尺寸大。通常要将某个模块绑定到某个操作,利用某种算法各操作实施调度,并为各功能模块在芯片上找到合适的物理位置,最后对液滴进行路径规划,以实现生化检验完成时间最小。就混合操作来讲,一旦两液滴合并为一个液滴,该液滴就要在其绑定的长方形混合器内不断地移动以促使其达到完全混合,而且在这个操作的执行过程中,模块的形状和位置是固定不变的。表1是根据文献[10]获得的样本在不同类型混合器上完成混合操作的时间。下面按照以上这种传统综合方法分析图2所示的生化检验在一个9×9芯片上的实施过程。

表1 不同混合阵列完成混合/稀释操作的时间
假设液滴生成操作时间为2s,光学检测时间为20s;由于液滴移动操作的时间极短,液滴移动至合并时间可忽略不计。这里假设每种液体的储液池数量Nr和每种酶测定的检测器数量Nd均设置为1,因此,两者均为不可重新配置的固定资源需求;而且,液滴寻址将于确定各模块位置之后在单独的阶段执行。图3给出了由甘特图表示的一种液滴操作资源绑定及调度方案,其中M1×4、M2×2、M2×3和M2×4混合器各1个,将M1×4混合器绑定给稀释操作DL1,M2×2、M2×3和M2×4混合器分别绑定给混合操作M3、M2和M1。在t=6.6s时,样本S1的稀释操作DL1结束。由于芯片尺寸的限制,在图3(c)t=6.6s时刻,只有混合操作M1可以开始执行,而M2需要暂时存储起来,直到M3于t=11.95s完成之后才能开始执行,如图3(d)所示。因此,最终生化检验的完成时间为38.25s。

图3 传统资源绑定和液滴调度方案实例
由图3可知,当多个液滴操作在同一时刻开始执行以实现并行处理时,由于各操作的完成时间不同,其完成时间也不同。在这种情况下,各功能模块的形状和位置的不改变会限制下一组并行操作的数量,最终影响生化检验总完成时间。然而,在数字微流控生物芯片中,任一功能模块都是一个虚拟设备,可通过不同电极的组合得电,随意改变该功能模块的形状,甚至改变其在片上的位置,因此,功能模块具有动态重构性。所以本文考虑在液滴操作执行过程中,改变其功能模块的形状和位置,以达到生化检验完成时间最小化的目标。
2 功能模块动态重构
图4(a)所示的是合并后的液滴在一个3×4混合器内运动以完成混合操作。如果在t时刻,从电极c1移动到了c2,那么t+1时刻液滴的运动方式有五种:向左、向右、向上、向下和保持不动。假设d0表示t+1时刻液滴运动方向与t时刻运动方向相同(即向前运动0°)时对应的混合程度;类似,d90和d180分别表示t+1时刻液滴运动方向与t时刻运动方向垂直(90°)或相反(即向后运动180°)时对应的混合程度。
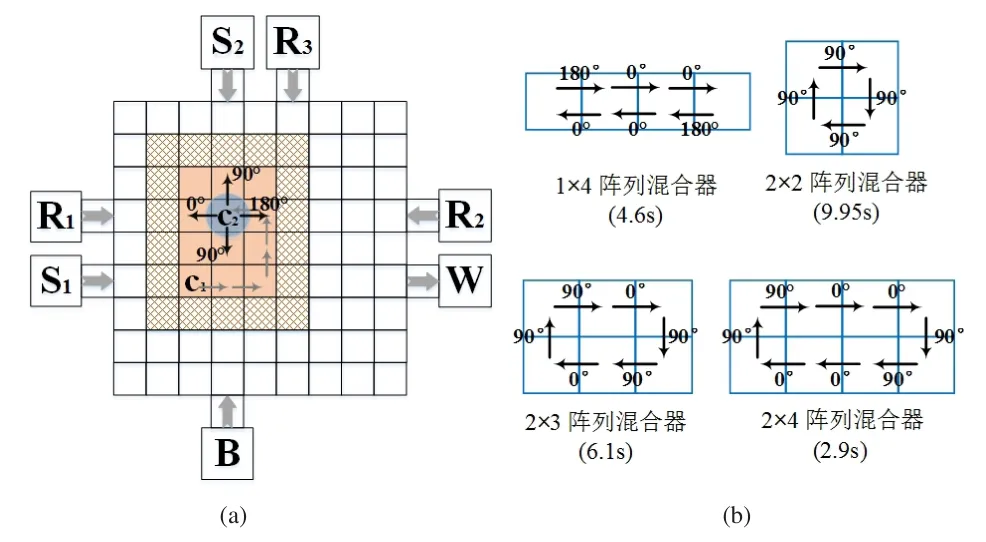
图4 混合操作
将液滴在表1所示的四种混合器中的运动按照向前(0°)、向后(180°)、垂直(90°)进行分解,具体如图3(b)所示。由文献[11]和文献[12]的实验及仿真结果,假设液滴在单位电极长度上运动所需时间为t,液滴完全混合用“1”表示,那么根据表1和图3(b)中各混合器的完成时间及分解情况,有:
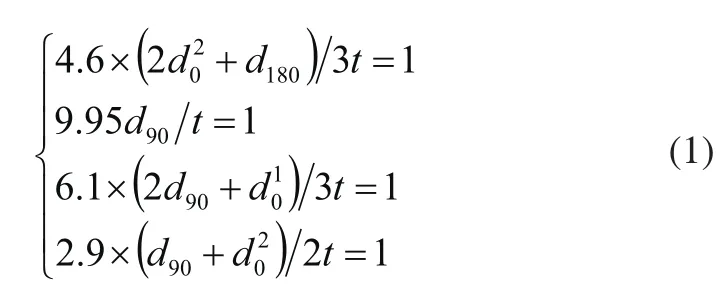
求得:d10=0.29t,d20=0.59t,d90=0.1t,d180=-0.53t。对2×3和2×4混合器的完成时间及分解情况进行分析发现,当液滴向前运动(0°)时,移动单位电极长度和移动两个单位电极长度所对应的混合程度不同。这是由于向前移动对应的混合程度不是定值,而是取决于向前移动的距离,也就是与向前移动完成混合时所用电极数量有关,移动距离越大,混合程度越大。这里为保险起见,将液滴向前移动混合程度只分为两种情况,即移动单位电极长度和移动两个(及以上)单位电极长度所对应的混合程度,分别用d10,d20表示。在液滴的各种混合形式中,向后运动180°,即t+1时刻液滴运动方向与t时刻运动方向相反,被称为流动的可逆效应,会阻碍液滴的混合[12]。上述分析d180=-0.53t体现了这一消极作用,因此,缓解或消除流动的可逆效应对于数字微流控芯片的液滴混合来说至关重要。按照以上运动分解和时间计算方法,我们可以确定在任何形状的混合器上执行混合操作的完成时间。例如,液滴在图5所示“L”形混合器上完成混合所需时间为2.58s。

图5 “L”型混合器
3 改进的资源绑定及操作调度方案设计
基于动态重构型功能模块的设计,我们可以根据实际数字微流控生化检验中空闲电极的分布及数量,及时改变某个模块的形状或位置,以实现生化检验完成时间最小化的目标。因此,对于图2所示的生化检验实例,应用动态重构型功能模块的设计思想,改进的资源绑定及操作调度方案如图6所示。在t=6.6s时刻之前,该方案与图3所示方案完全相同;但从图6(c)t=6.6s时刻起,混合操作M3所绑定的功能模块形状发生变化,由M2×2混合器变为反“Z”字形混合器,这使得操作M1和M2可以在t=6.6s时刻并行执行,这样便可减少生化检验完成总时间。操作M3在M2×2混合器上实现完全混合需要9.95s的时间,但由于在t=6.6s时其混合器形状发生变化,使其只执行了4.6s,完成了混合的46.23%,剩余53.7%的混合需要在反“Z”字形混合器上完成。因此,在这种功能模块形状发生变化的情况下,操作M3的执行时间总共仅为7.39s,与只在M2×2混合器完成混合所需的9.95s相比,时间减少了25.73%。而最终生化检验的完成时间减少为32.9s,与传统设计方案相比,完成时间减少了14%。在上述这种改进的设计方案中,在操作执行过程中,只改变了绑定于操作M3的功能模块的形状。当然,也可以同时改变绑定于操作M3的功能模块的形状和位置,具体如图7所示。

图6 改进的设计方案1

图7 改进的设计方案2
在图7所示的方案中,绑定于操作M3的功能模块不仅形状发生了变化,其位置也发生了变化。在这一过程中,需要对液滴进行寻址,即在t=6.6s时,液滴需要从图7(b)所示位置移动到图7(c)所示的位置,以便继续完成操作M3。由于移动操作时间极短,因此,操作M3中的液滴在这里的位置转换时间可忽略不计。在t=6.6s时操作M3只执行了4.6s,完成了混合的46.23%,剩余53.7%的混合需要在“”字形混合器上完成。因此,在这种功能模块形状发生变化的情况下,操作M3的执行时间总共仅为6.24s,同样与只在M2×2混合器完成混合所需的9.95s相比,时间减少高达37.29%。然而,最终生化检验的完成时间仍为32.9s,这是由于图6和图7所示的两种方案中,操作M1和M2都是在t=6.6s时刻并行执行,因此这里绑定于操作M3的功能模块的形状和位置具体如何变化,对生化检验完成总时间的影响几乎相同。虽然如此,但是我们可以明显看出,功能模块的形状和位置的变化确实对液滴操作的完成时间产生了巨大影响,单从与传统设计方案相比较这一方面来看,这样的改进措施大大缩短了完成生化检验的总时间。
4 结论
在传统的基于功能模块的数字微流控生化检验系统综合设计方案中,功能模块的形状往往都是长方形,而且在任何操作的执行过程中,与其对应的功能模块的形状和位置均不发生变化,这样的设计思路限制了液滴操作并行处理的数量,增加了生化检验的完成时间。针对这一问题,在操作的执行过程中,利用功能模块具有动态重构性这一特点,本文根据不同时间段内空闲电极的分布及数量适时改变某些操作所绑定的功能模块的形状及位置,以便最大程度地提高液滴操作的并行处理,最小化生化检验完成时间。此外,本文还提出了一种液滴运动分解和时间计算方法,用于确定任意形状的功能模块执行液滴操作的完成时间用。通过分析发现,本文提出的动态重构型功能模块,可以大大减少某个液滴操作的执行时间,从而最终缩短了生化检验的完成时间,达到了最小化生化检验完成时间的目的。这一设计思路对今后的数字微流控生化检验液滴调度优化具有一定的参考价值。