轻型无人机在危岩体结构面信息解译中的应用
2018-11-02张骞棋
张骞棋
(成都理工大学 地质灾害防治与地质环境保护国家重点实验室,四川 成都 610059)
0 前 言
危岩体是指受多组岩体结构面切割,并位于陡崖上的稳定性较差的岩石块体及其组合[1]。广泛分布于公路、铁路路堑边坡,水库河谷两岸的陡峻边坡上,其发育具有长期性,而失稳则具有突发性,对公路、铁路、水库等的运营以及周围居民的安全具有十分大的影响。
目前对危岩体的调查方法一般以罗盘、皮尺等现场勘查的方式为主,此法工作量大,效率低,对某些高陡边坡危岩体,勘查人员无法直达而采用经验或者目测数据进行估计,对最终的计算结果无法保证。近年来,三维激光扫描技术在危岩体调查中得到了较大的应用,它能够准确解读出危岩体的边界条件,通过将边界点三维坐标准确导入工程地质平面图,从而定位出危岩体所在位置,并解译其产状信息[2-4]。但是,三维激光扫描设备昂贵,其本身不具有定位功能,现场测量需要引用控制点准确定位危岩体,操作繁复,设备搬运困难,在地形受限情况下无法使用,具有很大的局限性。
无人机技术近几年日渐成熟,其机动灵活、影像分辨率高的特性,在测绘地理信息、防灾减灾、水利交通等方面发挥了重要作用。专业无人机高平台和处理过程的复杂性限制了其广泛应用,然而这给消费级轻小型无人机在危岩体调查这一领域的使用创造了一定的空间。贾曙光、杨力龙、王华俊等在轻小型无人机高陡边坡调查的应用中做了大量工作[5-7],李水清、胡瀚、王凤艳等在利用三维模型获得危岩体产状方面做了一定研究,但是在危岩体识别上仅仅局限于肉眼观察[8-10],凌震莹在大地坐标转换工作中做了一定的研究,但是其转换原理与李水清、胡瀚、王凤艳等有一定区别[11]。本文结合工程实例,利用轻小型无人机航拍获得的影像,借助PIX4D软件解译图像,构建三维影像模型,并利用Acute 3D Viewer软件及GPS信息,识别危岩体结构面,并根据大地坐标转换原理,计算结构面产状,以代替传统地质勘查方法的不足,并针对前人工作进行补充。
1 无人机航摄与图像解译
本次调查使用的是为大疆精灵4PRO无人机,解译系统为PIX4D软件。整个航拍—建模过程相对简单,主要流程如图1。
1.1 无人机航摄数据采集
无人机航摄数据采集包括场地面积预估、航线设计、镜头调整、飞行操控与缺损点位补充等过程。
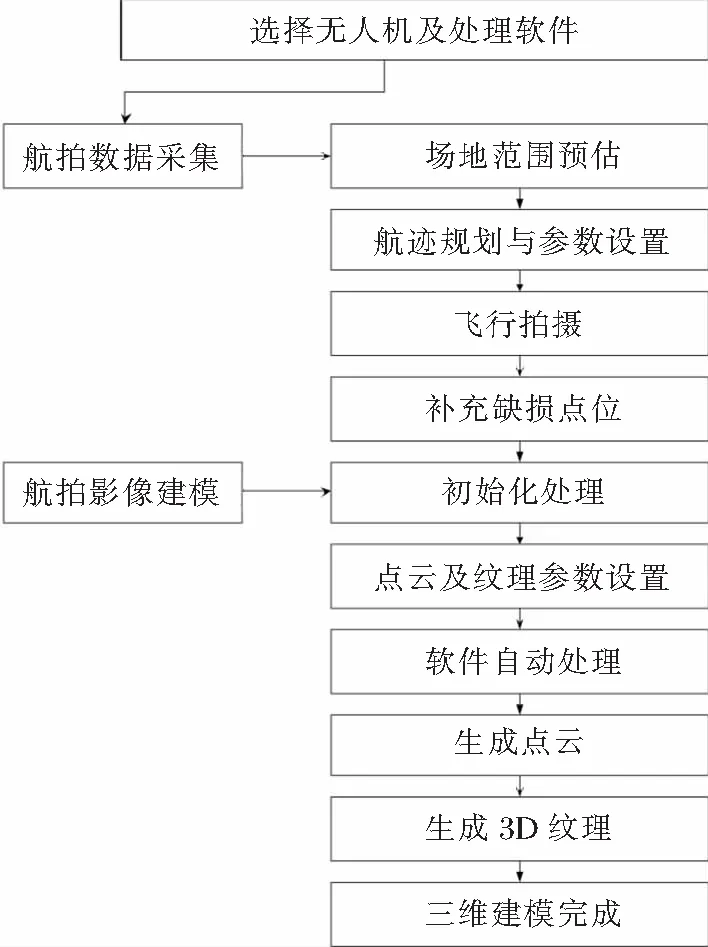
图1 技术流程图
研究区为一高陡边坡危岩体,拍摄范围预估为道路中线两侧各250 m区域,危岩带长2.0 km,其区域面积为2.5 km2。然后利用DJI GO App平板客户端现场定位,设计航线以及飞行高度、飞行速度等相关参数,如图2~3所示。

图2 无人机正射航拍路线图
本次拍摄共362张照片,正射拍摄255张,倾斜拍摄244张,并补充拍摄63张,符合成像比例要求。
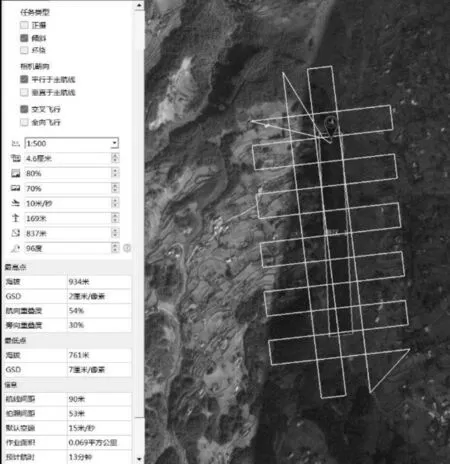
图3 无人机倾斜拍摄航拍路线图
1.2 图像解译与模型生成
业内比较流行的三维建模软件有有Bently公司的ContextCapture(Smart3D),俄罗斯Agisoft公司的PhotoScan,瑞士Pix4D公司Pix4D mapper,其中PhotoScan比较轻量级,但是生成的模型纹理效果不是太理想,Smart3D生成的三维模型效果最为理想,人工修复工作量较低,但是软件比较复杂不易上手且价格较高。
本次解译采用Pix4D mapper进行图像解译与建模工作。该软件具有自动化程度高、精度高、可同时处理大量影像数据、成本较低的优点,其解译结果直接为三维模型,对航测区域可以进行精度较高的还原。Pix4D mapper软件通过导入的照片,经过一系列空三解算,可以快速构建三维模型。最终建成的工程区三维模型如图4。
2 危岩体结构面信息解译
2.1 危岩体及结构面识别
利用Acute 3D Viewer软件可以浏览建成的三维模型,其浏览模式除了三维实景意外,还包括point cloud、wire frame和texture 3种模式,并且可以叠加显示。通过3种显示模式叠加,即可根据相应特征识别危岩体边界、结构面与节理裂隙,并利用其测量工具可直接获取节理长度,见图5~8。

图4 勘查区最终三维模型图

图5 三维模型识别的危岩体
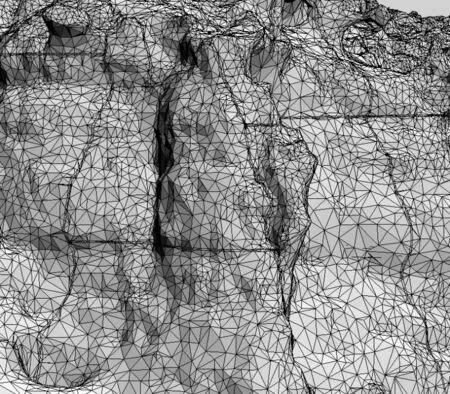
图6 三维叠加影像图

图7 危岩体航拍影像图

图8 节理迹长示意图
图5为此次调查圈定的危岩单体。由图6与图7可见,在较为平整的结构面上,图像网格划分较为稀疏,而在节理裂隙处,网格十分密集,在危岩体边界上,网格划分密集,且形成凹腔部位显示为阴影效果。图8显示为结构面节理迹长,可直接量测得到。
2.2 结构面几何信息解译
无人机航拍获得的照片带有大量岩体结构面的空间几何信息。但是这个空间几何信息原始数据是WGS84大地坐标系(L,B,H)下的经纬度与海拔高度。而结构面产状计算需要用到测区站心地平直角坐标系(N,E,U),因此,需要进行大地坐标系(L,B,H)与站心地平直角坐标系(N,E,U)之间的转换,其过程由两个步骤组成:1)从大地坐标(L,B,H)转换到球心直角坐标;2)从球心直角坐标(X,Y,Z)转换到站心地平直角坐标(N,E,U)[11-12]。
2.2.1 大地坐标系转换为球心坐标系
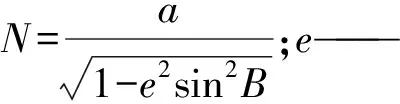
设 P0点的大地坐标为(L,B,H),对应的球心直角坐标为(X,Y,Z)。对应关系如图9。
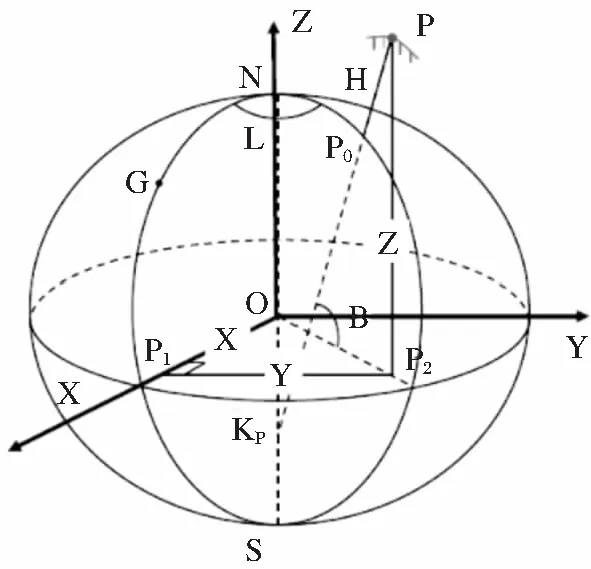
图9 大地坐标系与空间直角坐标系示意图
其转换公式为:
(1)
2.2.2 球心直角坐标系转换为站心直角坐标系
以测站P0所在坐标系为站心地平直角坐标系,P0点的大地经纬度为(L0,B0),空间坐标系的坐标为(X0,Y0,Z0)空间上另一点Q (测点)的空间直角坐标为(XQ,YQ,ZQ),则Q点在P0所在站心地平直角坐标系中的坐标为(N,E,U),对应关系如图10。
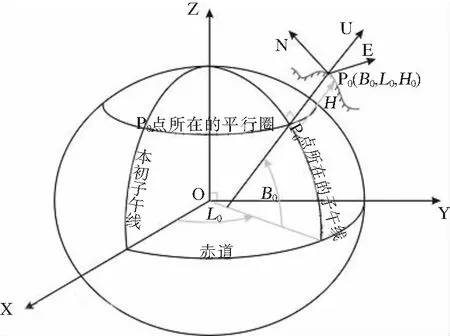
图10 站心地平直角坐标系示意
其转换公式为:

(2)
2.2.3 结构面产状计算
结构面的产状用倾角与倾向来表示。倾角是结构面与水平面间的夹角,倾向是结构面的法向量在水平方向上的投影与真北方向的夹角。因此,解译结构面的产状即确定结构面法向量[10],如图11所示。

图11 产状计算原理示意图
(3)

(4)
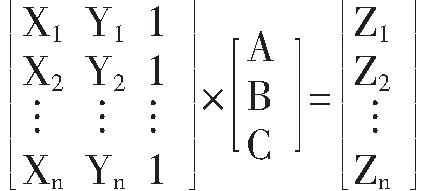
当选取的特征点个数大于3个时,采用最小二乘原理解算(A,B,C):
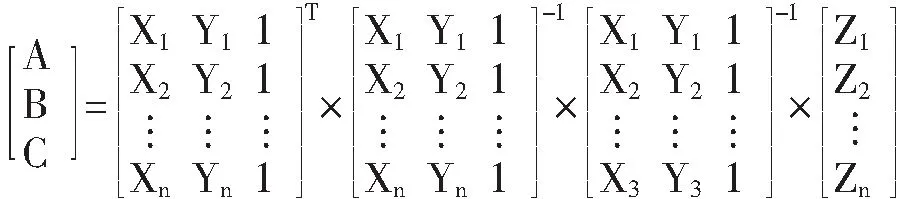
(5)
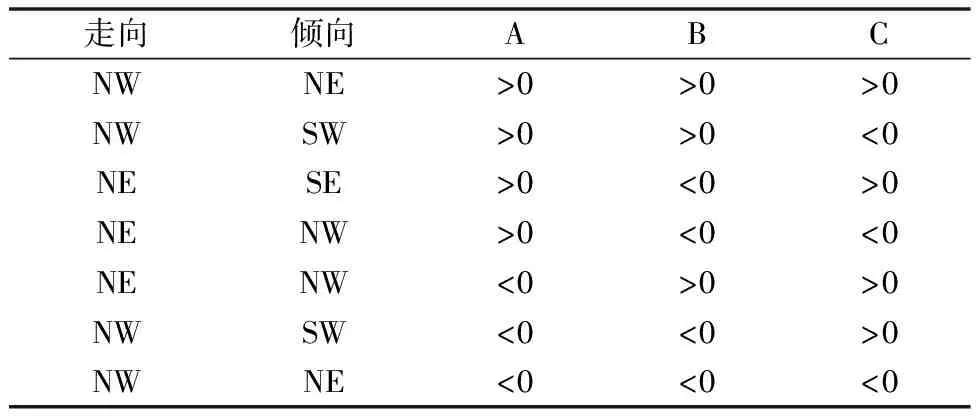
表1 岩体结构面产状与平面方程参数关系
则结构面产状为:

岩体结构面产状计算时选取的特征点数要求n≥3,且计算输入数据时,应按逆时针顺序进行。采点范围宜大,形状宜接近等边三角形,这样计算的误差将会越小。
2.3 工程实例
本次研究依托工程为一公路高陡边坡危岩带。该区位于湖北省恩施市红土乡,为赵家湾村出入的唯一公路。该区属于低山峡谷地貌,地层岩性为二叠系茅口组块状灰岩。其下为早期崩塌形成的堆积地貌,主要成分为巨、块石。陡崖段近乎直立,开挖后公路上方存在多处危岩块体。该区全年多雨,坡顶地面汇水多从此处沿坡面流下,公路常见落石,对下方行车及居住村民的生命安全造成较大的威胁。
根据以上计算方法,结合本次工程实例,对危岩体的多组结构面进行了试算,结果见表2,并对两种产状进行统计分析,见图12。
由表2及图12可知,通过计算得到的产状与实测产状误差均<5,影像解译结果与实测产状的倾角相差不大,倾向之间存在一定的差异,但基本满足公路地质勘查要求。
3 结 论
利用无人机航拍-PIX4 mapper解译图像技术,结合工程实例,提出了利用无人机摄影技术在高陡边坡勘查中危岩体特征信息识别与产状计算的应用方法,得出以下结论:
1)结合高分辨率摄像头与快速建模软件PIX4 mapper,轻小型无人机可以在高陡边坡危岩体的调查中获取可靠的GPS数据,三维建模直观清楚,具有很好的适用性。
2) 在得到的三维模型图中,利用Acute3D viewer软件3种浏览模式的叠加显示效果,通过其特征表现,可以较肉眼观察更为准确地识别危岩体边界、结构面与节理裂隙,并直接量测节理长度。
3) 利用大地坐标系—球心直角坐标系—站心直角坐标系之间的转换原理,根据结构面上任意n(n≥3)个不共线点的大地坐标得到相应的站心坐标,然后计算得到结构面的产状,且计算结果与实测数据相比较,倾角误差最小,倾向次之,但整体误差在可接受范围内。
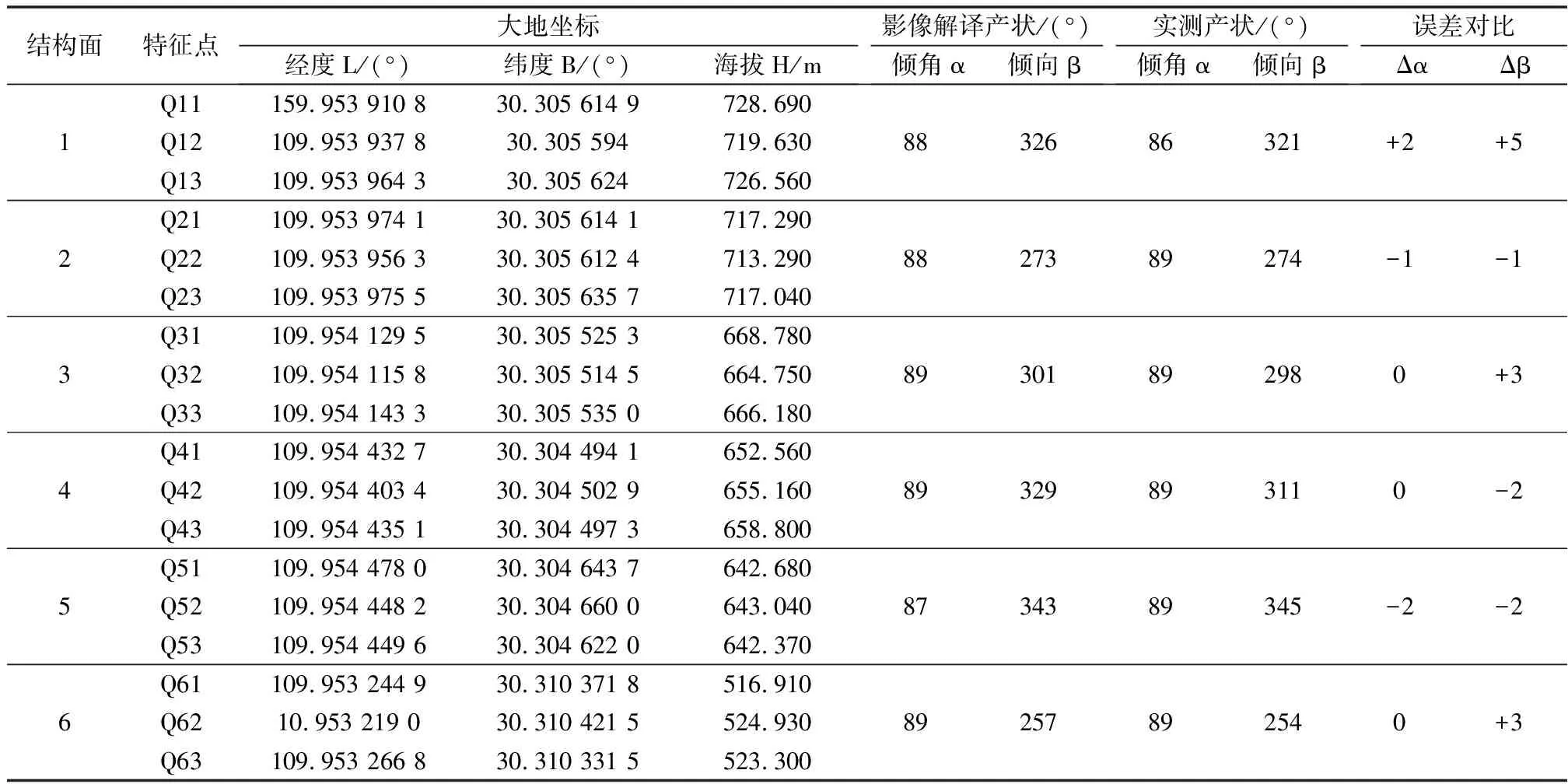
表2 结构面产状计算结果
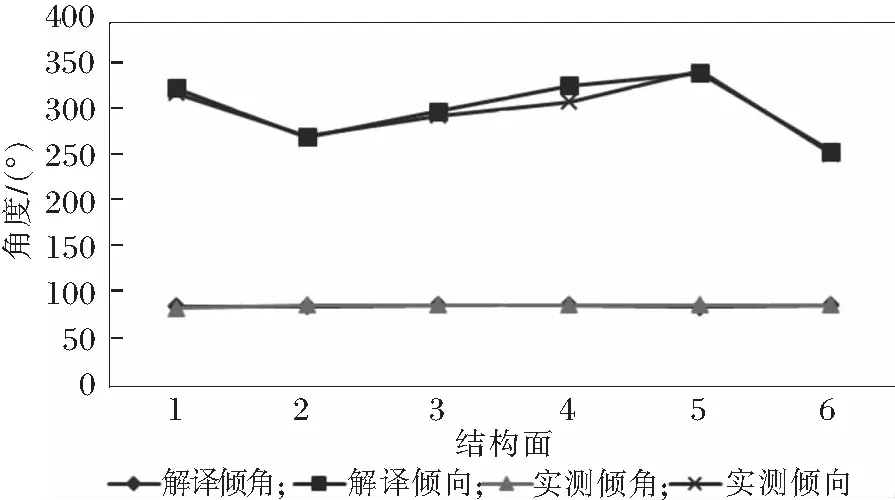
图12 危岩体结构面产状对比图
4) 轻小型无人机图像解译的结果误差在5(°)以内,基本满足一般工程地质勘查的要求,因此,在条件允许的情况下,可以考虑无人机航拍在公路工程地质勘查中的应用。
