基于全景光学的EVA航天员视场拓展技术研究
2018-11-02于灏洋
于灏洋,周 军,李 娟
(北京遥感设备研究所,北京100854)
1 引言
在载人航天活动中,人类一直不断拓展自身空间操作和活动能力,从初期的基于空间站和航天飞机的试验、维修,到未来还将开展的载人登月、登火等活动,都需要航天员开展出舱活动(Extra Vehicular Activity,EVA)来完成机器无法替代的任务。EVA中,由于舱外航天服比较厚重而且活动不便,甚至转身和弯腰等在地面轻松、快速实现的动作都变得不易,也影响到航天员对周围场景的直接、快速地观察,给多航天员协同工作和复杂环境下的操作带来不便。比如,当航天员登陆地外星体表面,在陌生环境下活动时,要同时面临生存和探索两方面的挑战:一方面,在星表行走时,航天员需要能够充分感知周边环境状况,还应当能够灵活使用和操控航天服和登陆车;另一方面,还需要同时便捷地观察周围场景并与队友们相互协同。因此,为航天员开发视场拓展系统,给其EVA提供实时、大视场、高清晰度的全景信息就显得十分重要。
全景成像技术是一种获取大视场信息的有效手段,其在机器人视觉、探测监控,航天航空等领域都有着广泛的应用。2004年美国勇气号火星车上搭载的一对全景相机,通过水平360°旋转扫描形成全景图像,运用双目立体视觉原理进行三维重建[1],首次向人类展示了火星的三维全景景观。但这种基于旋转扫描技术的全景拼接系统实时性差,体积也较大。Greguss在他的专利中提出一种基于柱面投影的环带全景透镜(Panoramic Annular Lens,PAL)[2],Powell等人又在此基础上进行了深入的研究,提出了一系列至今仍非常有价值的环形全景镜头结构[3]。国内浙江大学等单位也对PAL光学系统进行了较为深入的研究[4]。PAL光学系统有大视场角、成像质量高、结构紧凑、畸变小、后期图像处理简单、实时性好等优点,但受自身成像特点的限制,如通光口径较小、焦距较短、角分辨率低,如果增加数值孔径,会使系统成像质量快速下降[4],如果增加焦距则会使后继透镜组的设计变得十分复杂[5]。
基于EVA视场拓展需求,针对PAL上述不足,本文提出一种由双非球面组成的PAL光学系统改进方案;并通过优化光学设计软件的约束条件而加快软件对复杂光学系统优化的收敛速度,并通过仿真分析对改进方案进行分析验证。
2 设计要求
EVA航天员视觉拓展系统工作原理如图1所示,主要由全景成像光学镜头、图像采集与处理电子舱两部分组成,通常固定于EVA航天服的头顶位置,为便于航天员观察四周场景,光学系统应对方位360°、仰角10°、俯角50°范围内的景物清晰成像,对PAL光学系统的详细指标要求如表1所示。
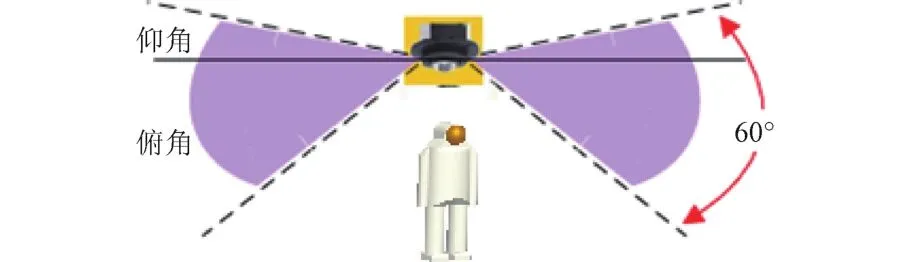
图1 EVA航天员视觉拓展系统工作原理Fig.1 The principle of FOV extension system for EVA astronaut
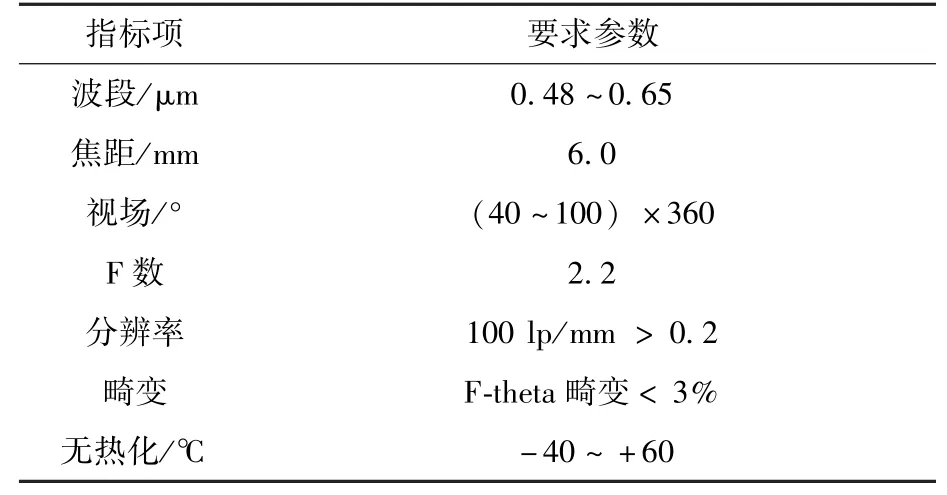
表1 PAL光学系统指标要求Table 1 Parameters of panoramic annular optical system
3 PAL光学系统改进设计
3.1 基本架构
PAL光学系统包含环带全景透镜与后继透镜组,环带全景透镜是一块旋转对称的光学材料,光线在其中可以发生多次折射与反射,以实现大视场成像,后继透镜组为一组常规透镜,其作用为平衡由前者引入的大视场像差,使系统达到理想的成像效果。
PAL光学系统遵循平面圆柱投影法,不同入射角度的光在像面形成同心环状像,该系统经过设计可构成f-theta系统[3]。因此,入射角相同的光线在第一折射面的入射区域相同——形成一个圆环,不同入射角光线的入射点在第一折射面形成不同大小的同心圆环,因此该光学系统的入瞳为一个个随入射角变化而变化的环带。所以PAL透镜的通光孔径通常不会很大,光能利用率较低,如图2所示。PAL透镜第一折射面的面积正比于入瞳大小,正比于视场角大小,所以在视场不变的情况下,增加PAL系统的入瞳尺寸,将会使PAL透镜尺寸增加,而且将会引入难以校正的轴外像差。

图2 PAL光学系统示意图Fig.2 diagram of panoramic annular optical system
3.2 改进优化
由于PAL透镜结构较为复杂,光线在其中要经过多次反射折射,容易从多途径引入杂散光,导致成像系统失效或降低成像对比度。为了抑制PAL光学系统中的杂散光,可将后继镜组第一片透镜作为系统孔径光阑[5]。从Powell专利中[3]选取与系统指标要求相近的镜头初始结如构图3,并在ZEMAX中建立模型,结构参数如表2所示。
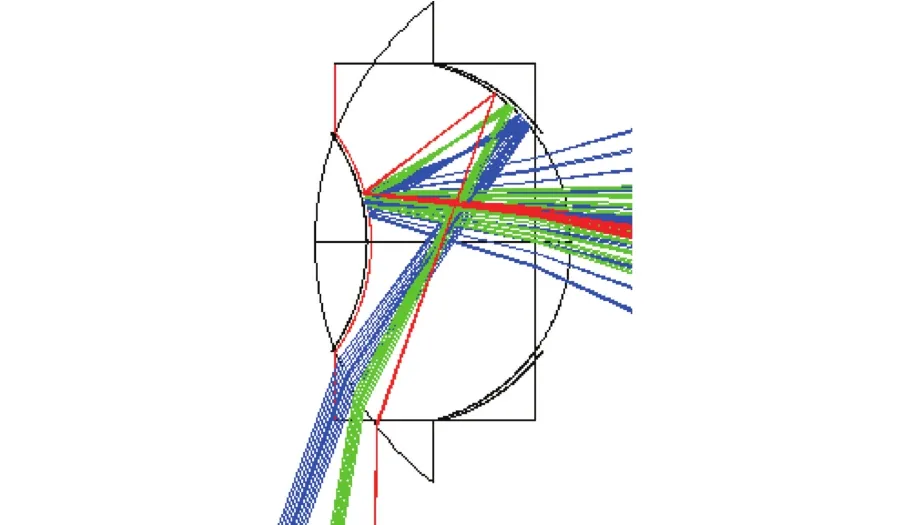
图3 ZEMAX中的PAL透镜初始结构Fig.3 The initial structure of PAL in ZEMAX

表2 PAL初始结构Table 2 The initial structure of panoramic annular optical system
为提高全景镜头的成像质量,将PAL透镜上的面2与面4一体化设计为非球面,面3也设计为非球面,为了降低非球面加工的难度,PAL透镜选用可以单点车削加工的PMMA材料,其中反射面镀金属铝膜,折射面镀增透膜,如图4所示。
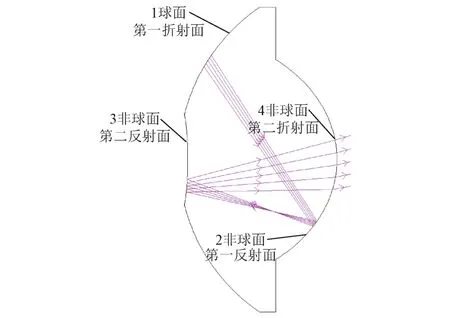
图4 70°光线入射PAL透镜示意图Fig.4 Illustration of 70°incidence light into PAL
后继转像系统如图5所示,后继转像透镜组的主要任务是校正由PAL引入大视场而带来的各种像差,由4片透镜组成,包含2组双胶合透镜,负责系统色差的校正,最后一片负透镜对系统场曲进行校正。由于在PAL模块中引入了非球面,可减轻后继镜组像差平衡的压力,因此后继透镜采用全球面设计,可降低了加工与装调的成本;光学材料选择理化性能好、加工性能优良的成都光明常备玻璃材料。

图5 后继成像系统Fig.5 The relay imaging system
由于PAL透镜全景透镜模块的每个面之间相互关联,很难从初级像差推导出一个最优的结构形式。通过ZEMAX光学设计软件来寻找最优解,可以解决这一问题。但是PAL透镜包含多个反射面与折射面,光线传播路径复杂,软件优化过程易使PAL结构变形、陷入局部解,偏离正确的优化方向。利用ZEMAX优化该系统的关键在于合理约束PAL透镜的各个表面、光线保证PAL结构的合理性,本文的约束条件设置如下:
1)利用操作数REAY约束边界光线,使边界光线1的反射光线与边界光线2的透射光线相分离,因为该分界点决定了PAL透镜反射膜与增透膜的界限,使反射与透射光在该点分离才可保证光线传播路径的合理性,如图6中圆圈位置所示。

图6 PAL光路图Fig.6 Beam path of PAL
2)利用操作数RAGZ、RAGY约束两边界光线在第一折射面的位置,使边界光线1的入射光位置低于第二反射面与第一折射面的交点,边界光线2的入射位置始终在第一折射面上。
3)利用操作数控制第一折射面的曲率半径为正,并配合其他操作数控制PAL透镜的入瞳尺寸、径向尺寸等参数。
4)对于f-theta全景系统需要采用disc操作数对畸变进行控制。
最终设计结果为:视场(40°~100°) ×360°、有效焦距为 6.1 mm、F数 2.2、入瞳直径2.77 mm、光学系统总长98 mm、后工作距大于8 mm,较大的相对孔径保证系统的光能利用率。设计模型与光路如图7所示。
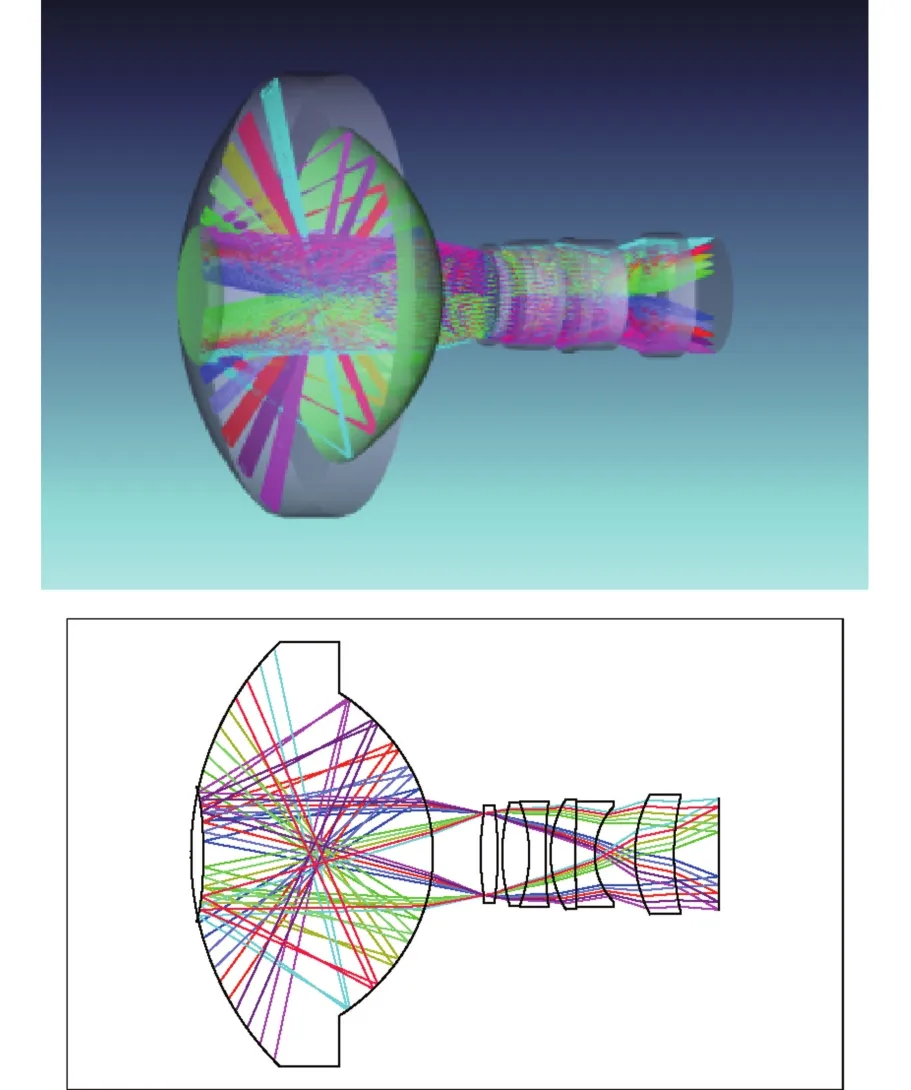
图7 系统结构图Fig.7 Layout of the system
4 设计结果分析
如前所述环带全景光学系统为f-theta系统,系统的f-theta畸变小于2.2%,如图8所示。环带全景光学系统调制传递函数MTF曲线,所有视场在100 lp/mm处MTF值均大于0.4,成像质量良好。轴外视场的点列图尺寸最大,其RMS半径5.04 μm,意味着该系统85%的能量可以集中在直径5 μm的像元内,如图9所示。像面中心与边缘的相对照度下降小于0.2,可以认为整个像面照度分布均匀如图10所示。
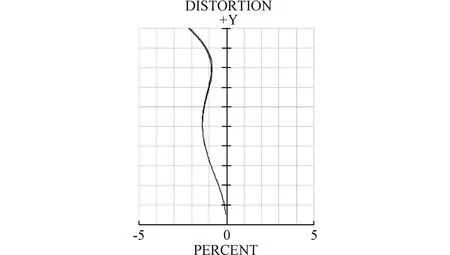
图8 畸变曲线Fig.8 The f-theta distortion curve

图9 MTF曲线与点列图Fig.9 Modulation transfer function(MTF) and spot diagram
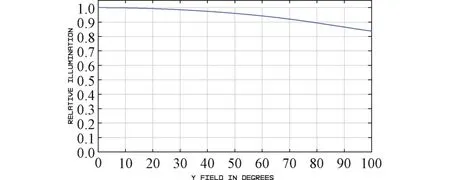
图10 像面相对照度Fig.10 Relative illumination of image surface
全景光学系统采用被动无热化设计,系统在低温、高温的环境下MTF曲线如图11所示,与常温下的MTF曲线相比,其像质变化不大,被动无热化效果较好。
杂散辐射是影响光学系统成像质量的重要因素之一,对该系统进行杂散辐射分析,在ZEMAX中进行非序列建模。通过模拟两个纵向位置不同的环带光源,对光源进行光线追迹查看像面上的目标及能量分布情况,分析是否有鬼像及其它杂散光。光源半径为50 mm,长度5 mm,两个光源相距5 mm,光源辐射能量为100 W。为保证仿真的有效性,光学系统各表面透过率98%,剩余反射率2%,探测器参数根据实际探测器设定,可得到结果如图12所示。可以看到PAL光学系统将双环光源展开为环带成像在探测器上,探测器中心位置存在少量杂散光,是光线在PAL透镜内部经多次反射后进入后继镜组的杂散光,其能量较弱并不影响成像效果。

图11 -40℃和+60℃下的MTF曲线Fig.11 The MTF curves at -40℃ and +60℃

图12 非序列模式系统杂散光分析Fig.12 Stray lights analysis in non-sequential mode
5 结论
本文以EVA航天员的视场拓展为应用背景,开展了无需转动机构的全景成像技术研究,设计了一种PAL环带光学全景系统,并通过仿真分析加以验证。PAL透镜采用双非球面设计,提高了成像质量,后继透镜组结构简单,系统采用被动无热化设计,在-40℃ ~+60℃温度范围内成像质量基本不变,该系统有着成像质量好、通光孔径大、结构紧凑等优点,未来可与舱外航天服的头盔和近眼显示系统结合,以实现航天员视觉范围的穿戴式拓展。