基于触觉感知的盲人助行系统研究
2018-10-30王瑞荣李晓红
王瑞荣,李晓红,陈 瞳
(太原工业学院电子工程系,山西太原030008)
据世界卫生组织估计,世界盲人人数有4500万,而中国就有500万,并且每年新增盲人数量高达45万。因此研制导盲和帮助盲人行走的智能仪器设备具有重大的研究价值。
视觉障碍者依靠导盲拐杖或导盲犬来进行导航。导盲拐杖很方便实用,导盲犬不仅可以保护他们,而且可以引导他们到达目的地。然而,这两种方式都不能够详细的给他们描述周围环境信息。为了辅助视觉障碍者安全自由的行走,各国研究者研制了很多电子导盲产品,载有不同类传感器的导盲拐杖,如超声传感器、激光传感器等距离传感器,距离传感器可以帮助系统获取障碍物与视觉障碍者之间的间距,并通过语音或触觉提示给视觉障碍者[1-4]。
随着机器人技术的发展,研究者们结合移动机器人技术与传统的导盲拐杖,设计了新型导盲设备,如导航拐杖[5],导盲机器人[6],以及其他结合视觉摄像头设备捕捉环境信息,获取路面图像信息,通过计算机处理图像,转换提示盲人的设备[7-9]。Radeep等人[10]报道了一种可穿戴系统,通过触觉传感器感知周围环境进行辅助导行。但是,完全通过机器人视觉并不能提供视觉障碍者路面微小障碍物的信息。
文章提出的盲人助行车系统结合Kinect所采集的环境深度信息与红外传感器采集的路面凹凸信息,全面采集视觉障碍者前面的环境信息,更加保障了他们行走的安全性。此外,振动触觉提示时间较短,把使用者的不适感降到最低程度,本系统采用装有振动电机阵列的振动触觉表达腰带对环境信息进行提示。最后,通过实验设计验证了系统设计的可行性及安全性。
1 系统设计
本系统采用车体结构,并将Kinect摄像头,红外传感器,控制机箱等放置在车上。同时视觉障碍者在行走时,需要穿戴本系统中的振动触觉传感系统(腰带),如图1。Kinect是微软推出的一款摄像头,它主要包含一个RGB彩色摄像头和一个3维深度提取的红外摄像头。0.5~3.8 m范围内的深度信息可以被精确检测到。系统采用了基于Kinect实时视频采集和图像处理的环境提取技术。通过Kinect实时采集视频图像得到环境信息,通过上位机对每一帧图像的处理获取深度信息,再通过设计图像压缩算法[11-12],将周围复杂的环境信息的特征提取出来,对前方障碍物位置和可通行路线进行判断,最终计算出可安全通过方向。超声传感器安装在车体底部,主要为了检测路面坑坑洼洼的状况,防止路面小的碎石及凹坑的存在,使得视觉障碍者行走过程中安全收到威胁。视觉障碍者通过振动触觉表达腰带来感知环境信息。系统设计了特定的振动编码模式,通过不同振动编码的设计,视觉障碍者可以感受到环境信息。
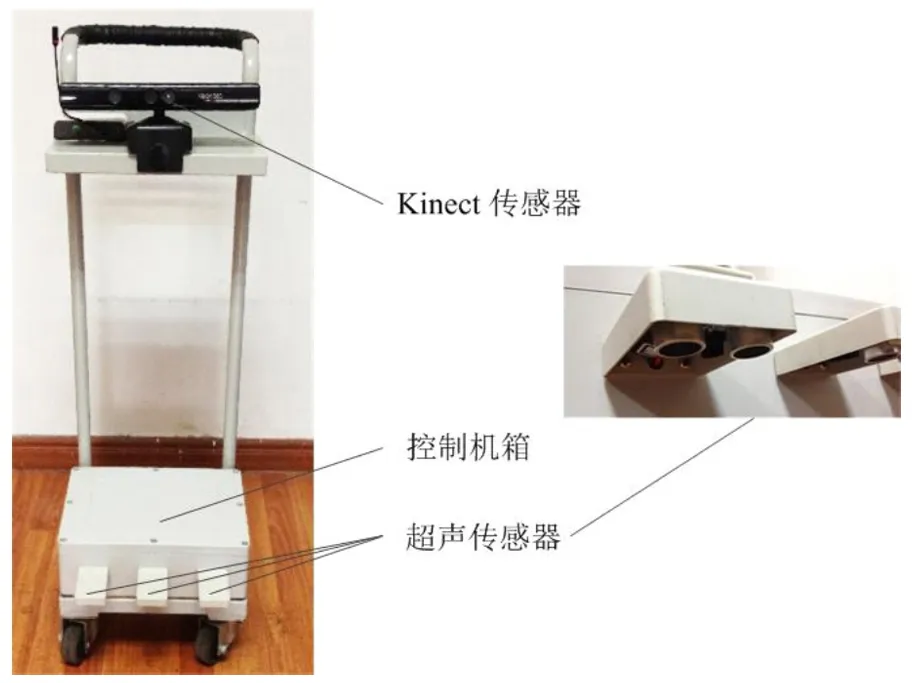
图1 系统结构图
2 安全方向提取
本系统采用Kinect摄像头作为系统的图像采集装置,该装置内嵌数据采集处理开发平台,具有实时性、高精度等优点。通过Kinect自带的接口函数可以方便地获取环境的深度信息,通过本文采用的深度数据压缩方法,可以将获取的深度信息用于障碍物距离的判断,结合超声传感器,检测路面信息,将两种安全信息映射到振动触觉表达腰带上,具体流程如图2所示。

图2 安全方向采集流程图
2.1 深度数据压缩算法
利用振动触觉提示方位信息时需要考虑人触觉感知的局限性:触觉空间分辨率不高,远小于图像的像素分辨率,导致不能将图像空间直接映射到触觉空间,因此振动提示的方向不能太多。另一方面如果提示方向过少就无法实现精确导盲的功能。本系统中选取了5个提示方向,把金子塔压缩算法运用于深度数据处理,将图像640×480的高像素空间压缩到6×2的振动电机阵列。该算法采用迭代压缩的方式,尽最大程度保留图像信息,为后续方向信息的有效性做好基础。
2.2 微小障碍检测
为了弥补图像采集的盲区,进一步保证盲人行走的安全性,本系统集成有基于超声传感器的微小障碍检测模块。通过高精度的超声传感器的测距功能,可以检测路面是否崎岖不平、是否有障碍物或坑坑洼洼等微观信息。
3 结果与讨论
振动触觉表达腰带装有8×2个振动电机阵列的,环绕使用者腰部,腰部前方分布6×2个电机,腰部后方分布2×2个电机,如图3,对电机进行编码。振动电机通过100 Hz的方波驱动,标准值输出可通过周期调整[12]。
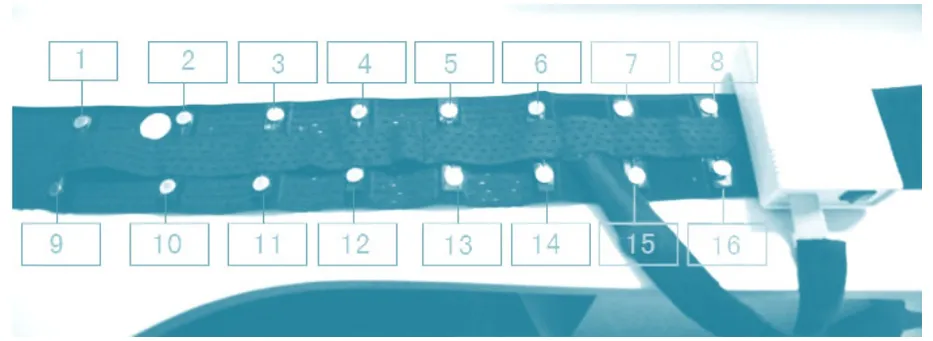
图3 触觉传感系统结构图
3.1 振动编码
前方振动电机(包括电机1~6,电机1~14)用于提示环境方向信息,后方振动电机(包括电机7,电机8,电机15,电机16)。前方通过振动编码实现五个方向的振动提示。电机1、电机2、电机9、电机10提示方向1,电机2、电机3、电机10、电机11提示方向2,电机3、电机4、电机11、电机12提示方向3,电机4、电机5、电机12、电机13提示方向4,电机5、电机6、电机13、电机14提示方向5,其对应关系如表1所示。后方振动电机用于提示路面凹凸情况,主要对应的振动编码模式如表1。

表1 振动编码提示
3.2 振动编码测试
振动编码的有效性直接影响系统的可行性,实验中首先测试了不同方向有障碍物时,传感器系统的响应特性,如图4.1所示,经过300次的测量,传感器的响应误差小于0.1%,能实现对运动过程中障碍物位置的准确判断。
实验中同时通过实验者进行对该系统的应用测试。在实验之前,受试者需要花费20 min来学习振动编码与所提示信息间的对应关系。实验主要测试安全方向信息的准确性。安全方向信息主要包括方向1~5。此外,受试者需要重复本次试验多次,实验结果如图4所示。振动编码模式感知正确率均高于90%,而且随着试验次数的增多,正确率也有很大的提高,所在测试次数的增大,正确识别率接近完全正确。
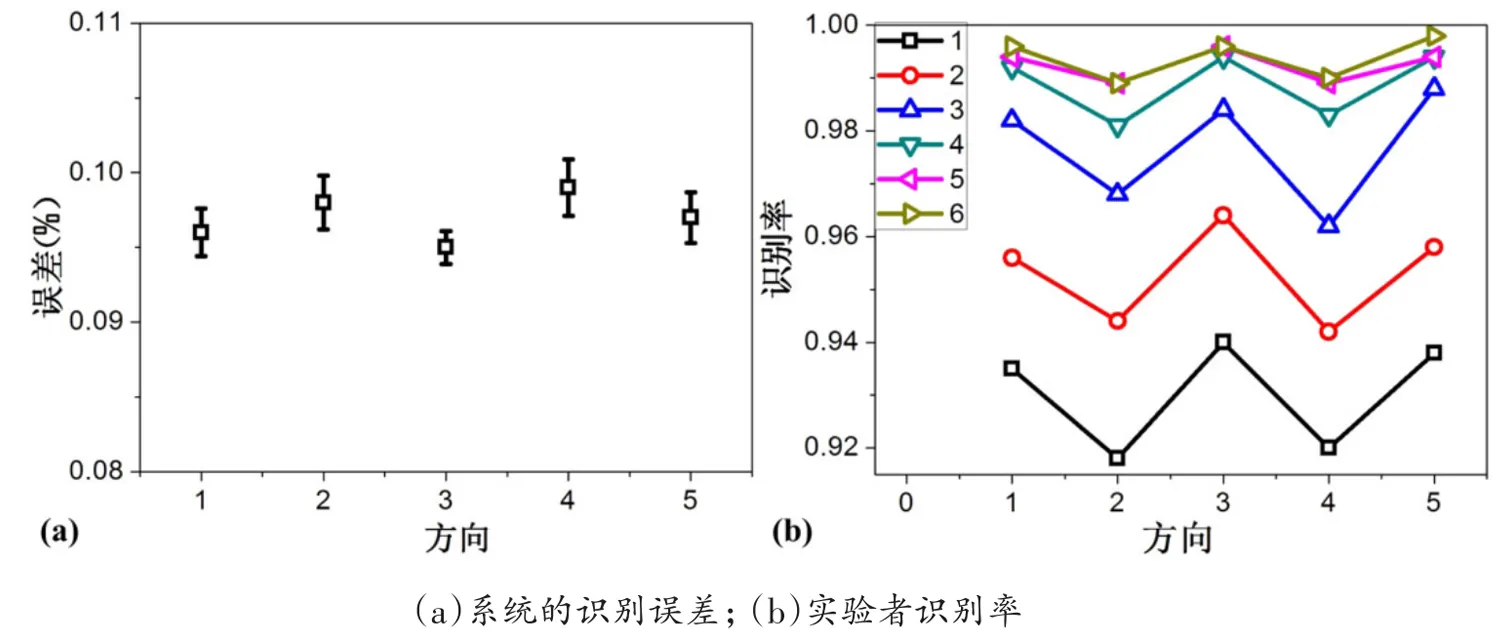
图4 方向识别准确性试验
3.3 系统应用
实验中,首先对该系统进行了设定障碍物路面环境测试,如图5(a)所示设定的障碍物路面,当实验者从(1)位置出发,路面没有障碍物,实验者一路直行至终点,表明该系统优先支持直线行走,节省盲人行走时间。当实验者从(2)位置出发,前方遇到障碍物A区域时,实验者通过逐步的退后调整,躲避障碍物,从障碍物的一侧通过到达终点,表明该系统遇到障碍物能够准确及时的提醒盲人,保证盲人行走安全,提高正确的行走路线。当实验者从(3)位置出发,遇到前方障碍物B区域时,实验者通过逐步的退后调整,向右侧躲避,到达路边,通过系统的对路边缘的判断,提醒实验者前方有障碍物,右边驶离路面,实验者开始向相反方向调整,如图5(a)中深红色路径所示,实验者逐步调整到可通过区域,绕过障碍物B区域到达终点,表明该系统确实能够确保盲人安全行走于路面,且能够绕过障碍物到达终点,实现对盲人行走的辅助功能。

图5 实验测试
实验中,对该系统进行了实际路面行进测试,受试者通过眼罩蒙住眼睛,试验场景选取在校园内主干道路,该道路两边有树木,常有人行走,停有汽车,适用于测试本系统。受试者需要从试验场景的A点走到B点,常人从A点走到B点所需要花费的时间为60 s。实验者从A点到达B点平均所需要的时间为120 s。如图5(b)所示,从实验结果图中可以看出,实验者行进路径有较大的波动,在行进过程中通过本系统对障碍物的实时判断和反馈给实验者,实验者通过不断的进行路径调整,躲开了道路中的微小障碍物,安全到达终点。在实验后对四位受试者进行调查,受试者指出在行进过程中,他们可以舒适的感知到系统所提示的信息,这给他们带来很大的安全感。
4 结论
本文提出了一种多传感器融合感知的盲人助行车系统,该系统通过计算机视觉提取环境中可以通行方向的信息,并结合超声传感器检测路面凹凸情况,通过触觉腰带给使用者振动提示,经过试验测试,该系统不仅能有效的提示使用者安全通行,而且能够提供使用者的安全感,让其独立地行走。系统更完善的测试将在未来工作中实现。
