扫路车扫刷离地高度自适应调节系统对比研究
2018-10-26郭佳鹏朱阳黄振峰曹晨强马莹
郭佳鹏,朱阳,黄振峰,曹晨强,马莹
扫路车扫刷离地高度自适应调节系统对比研究
郭佳鹏,朱阳,黄振峰,曹晨强,马莹
(陕西汽车控股集团有限公司技术中心,陕西 西安 710200)
分析了目前市面上扫路车通用的扫刷离地高度调节方法的劣势,提出基于两种扫盘结构的多种离地高度自适应调节方法,介绍了通过机、电、液(气)一体化技术实现自适应调节的结构原理,并进行对比分析。
扫刷;离地高度;自适应调节;机电液(气)一体化
引言
随着我国环卫产业的发展,环卫厂家对产品研发及生产的投入持续加大,国产扫路车产品性能已大大提升,但在节能、降噪、可靠性、舒适性以及智能化、自动化等方面仍有很大提升空间。因此,需要加大研发力度,以新能源无人驾驶扫路车为终极目标制定阶段性攻关计划,同时针对其主要部件如风送系统、除尘系统、动力系统等进行虚拟验证及试验研究,加强CFD分析、NVH分析等在扫路车上的应用,以提高扫路车设计的理论水平。
扫路车扫刷是影响清扫性能的关键部件,也是作业易损件。随着扫刷不断磨损,为保证清扫效果,就需要调整扫盘离地高度。目前我国扫路车的扫刷高度调节装置一般都是通过弹簧、链条手动调节,再结合螺杆进行微调,这样就需要消耗操作工人大量时间,且调节时最少要调一环,容易使扫刷受力不均,保证不了触地压力的一致性,也使得磨损较快,使用寿命较短。因此,研究扫刷离地高度的自适应调节系统很有必要。
1 扫路车常见的扫刷结构及调节方法
常规的浮动式扫盘结构,包括扫盘10、马达8、浮动式油缸4、扫盘离地高度调节装置3、转轴座1、连杆6、调节叉5、连接支架2、马达座9等组成。扫盘10通过连杆传动机构连接在底盘车架上,马达8作为驱动装置带动扫盘10进行转动来完成扫路作业。浮动式油缸4的活塞端球铰于连杆6上,另一端浮动连接于固定车架端。调节叉5包括调节螺纹筒,正、反丝叉头及锁紧螺母组成,用以调节扫盘前倾角。连杆6一端连接在固定于连接支架2的转轴座1上,另一端通过调节支架与马达座9相连,马达座9与连杆端支架连接处,由调节螺栓7来调节扫盘外倾角。扫盘离地高度调节装置3由手动调节链条、浮动式弹簧及调节杆组成,调节装置一端与固定车架端相连,一端连接在连杆6上。

图1 传统扫盘结构
1、转轴座;2、连接支架;3、高度自适应调节装置;4、浮动式油缸; 5、调节叉;6、连杆;7、调节螺栓;8、马达;9、马达座;10、扫盘
连接支架2上设置有内外限位块,整个连杆传动机构通过转轴座1与连接支架相连,扫盘10的离地高度是由连接在连杆6上的浮动式油缸4和扫盘离地高度调节装置3的综合作用下,连杆6绕竖向转轴的外摆量及横向转轴的上下摆动量决定的,在浮动油缸作用下,构成多维一体运动。油缸4完全伸长后,其浮动量及调节装置3构成了扫盘离地高度调节量。实现浮动式平衡后,随着扫刷磨损,调节伸缩杆或链条,补偿磨损量,提供合适的扫盘离地高度。另外,由调节螺纹筒,正、反丝叉头及锁紧螺母组成的调节叉5,用来调节扫盘前倾角。马达座与连杆端支架连接处的调节螺栓7,用来调节扫盘外倾角。
2 扫路车扫刷离地高度自适应调节装置及调节方法研究
2.1 基于扫刷磨损量检测反馈的自适应系统
为了适应本系统,扫盘结构与常规结构类似,只是把常规结构的扫盘离地高度调节叉以电动执行器进行替换,配以检测反馈传感器通过程序来自动控制。调节方法通过扫刷磨损量或者扫刷触地压力的科学检测,反馈出扫盘离地高度调节量,以控制系统控制带有电动推杆的调节装置的伸缩量进行精确调节、自动补偿,辅以浮动式连接结构,使扫盘的离地高度始终处于优良状态,实现扫盘离地高度的自适应调节。所述扫刷磨损量的检测方法包括电位传感或扫刷触地压力计算转化或者液压反馈等,以下介绍一种扫刷磨损量检测方法。
如图2所示,利用电阻丝磨损,电位传感作为输入量,电阻丝与扫盘毛刷刷丝等安装要求。本检测结构包括201信号传输处理模块、202电阻丝、203外绝缘保护套、204绝缘隔离物等组成,信号处理模块201与电阻丝202相连,外绝缘保护套203、绝缘隔离物204,确保电阻丝保持绝缘状态,通过磨损程度的不同,信号处理模块201,向控制器反馈相应的长度数据。

图2 电位传感检测机构
工作原理:外绝缘保护套203、绝缘隔离物204与电阻丝201组成如图2所示的结构,根据磨损程度的不同,整条电阻丝的电阻产生变化,信号传输处理模块201根据电阻丝阻值的变化,经过一定的处理,向控制器发送扫刷的长度数据。
如图3所示,为本系统的调节流程图。当步骤300开始工作后,进入步骤301控制器接收扫刷目前的长度数据;进入步骤302判断扫刷是否需要更换,如需更换则进入步骤305,做出警告,并提示更换扫刷;如不需要更换则进入步骤303,判断盘刷离地高度是否处于优良,否则进入步骤306调节扫盘高度后再次进行循环判断。若是则进入步骤304进行正常作业、持续判断扫刷长度。

图3 调节流程图
本方法需要对样件工作状态进行试验标定,以多次试验的结果作为判定基准,来进行反馈程序的升级。而且,扫盘旋转状态下的电阻丝磨损量检测也是一个难点。
2.2 基于滑动变阻器检测压力的自适应系统

图4 滑动变阻器检测触地压力机理
另一种基于压力反馈的扫刷磨损量的检测方法,可考虑应用滑动变阻器检测触地压力进而程序自动控制扫刷离地高度。扫路车工作时,扫刷触地后会有一定的压力,当扫刷磨损后,扫刷的触地压力发生变化,从而引起安装在扫盘连接处的滑动变阻器阻值发生变化,根据阻值的变化,程序计算出需要调整的高度从而保证触地压力,这种检测方法同样需要进行试验标定,根据试验结果归纳出扫盘作业时离地高度与扫刷触地压力之间的关系。
2.3 一种新扫盘结构及基于触地压力测试的自适应系统
基于某新式扫路车研发项目,全新开发了一种气动扫盘,该结构如图5。扫盘系统包括气缸、扫刷支撑结构、四连杆机构及扫刷触地压力自适应系统。该扫盘的安装座、调整螺杆、转臂、连接座二组成四连杆机构,由气缸推动实现扫盘系统的升降,并可通过调节螺杆调节扫刷的接地角度。扫刷触地压力自适应系统包括梭阀、电磁换向阀、调压阀、调速阀及气源。通过控制系统调节回路的变化实现扫盘系统的升降及自适应调节,避免了不必要的人工调节,并有效降低了扫刷的磨损速度。
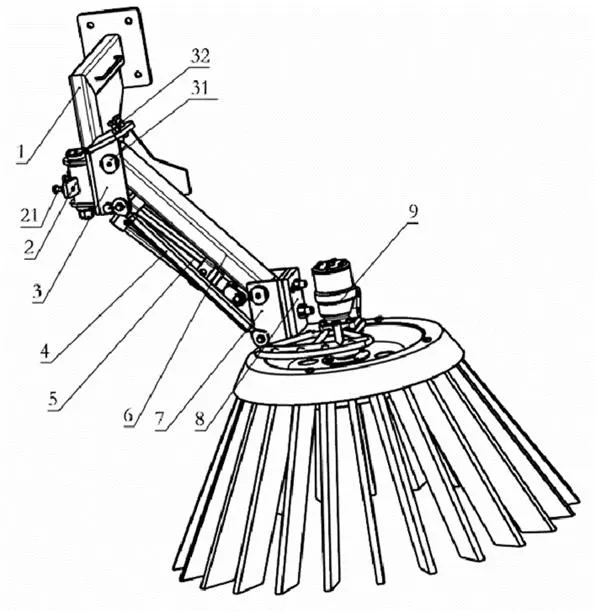
图5 清扫装置等轴测视图
如图6所示,所述控制系统包含两个回路,回路一为经由(51)气源、(52)两位五通电磁阀、(52)两位五通电磁阀A口、(53)调速阀、(541)梭阀进气口一、(543)梭阀出口、(57)气缸;回路二为经由(51)气源、(52)两位五通电磁阀、(52)两位五通电磁阀B口、(56)两位两通电磁阀、(55)调压阀、(542)梭阀进气口二、(543)梭阀出口、(57)气缸。

图6 气路控制系统原理图
所述气缸的有杆腔接口安装消音器,与大气接通。所述气源一般为专用二类底盘的辅助储气筒。
当(52)两位五通电磁阀得电A口接通时,此时(541)梭阀进气口一的压力大于(542)梭阀进气口二的压力,回路一处于接通状态,气缸无杆腔进气,气缸伸出,推动四连杆机构上行,实现扫盘的提升,并可通过(53)调速阀调节举升的速度。
当(52)两位五通电磁阀得电B口接通,(56)两位两通电磁阀未接通时,此时整个气路处于切断状态,气缸无进气,扫盘系统由自重作用向下运动,实现扫盘下降。所述(56)两位两通电磁阀采用时间控制,现有方案为(52)两位五通电磁阀得电B口接通2秒后(56)两位两通电磁阀接通。
当(52)两位五通电磁阀得电B口接通,(56)两位两通电磁阀接通时,此时(541)梭阀进气口一的压力小于(542)梭阀进气口二的压力,回路二处于接通状态,气缸无杆腔进气,对气缸施加一个向上的力,此时扫盘重力=气缸力竖向分力+扫盘旋转向心力竖向分力+扫刷触地压力,通过(55)调压阀调整系统压力,从而调节扫盘的接地压力。当扫盘持续工作磨损时,接地压力减小,扫盘重力>气缸力竖向分力+扫盘旋转向心力竖向分力+扫刷触地压力,扫盘在重力作用下自动下降,重新找到新的平衡,实现扫刷的自适应调节。
通过控制系统可实现扫盘的升降动作,可实现扫盘的自适应调节,并提供了一个反向力,从而减少了扫盘的磨损速度。
3 扫刷离地高度调节对比分析
综合研究三种扫盘自适应调节系统,理论上皆可行。方案1基于扫刷磨损量检测反馈及方案2基于滑动变阻器检测压力的自适应系统,理论上都是通过扫刷磨损补充量的检测,针对反馈信息以控制系统输出调节量,通过便于控制的电动执行器推杆伸出来实现扫盘离地高度的自适应调节。而方案3通过分析扫盘受力,根据平衡状态下“扫盘重力=气缸力竖向分力+扫盘旋转向心力竖向分力+扫刷触地压力”公式,通过气控系统内部无极调节,来实现扫盘离地高度的自适应调节,同时该结构也有改进空间,调整结构使扫盘收起状态下气缸有杆端回收,则气缸受力更佳。
4 结语
目前,扫路车扫盘自适应调节系统已获得专利保护(专利号:CN 107100122 A)。由于自适应调节系统的前端磨损量检测实现的难度较大,样件可靠性还有待验证,且样件工作状态还需进行大量的试验标定,目前还处于未大量推广阶段。但该技术的前瞻性及可实现性仍值得同行进行进一步细化,以此来推动我国扫路车行业的技术发展。
[1] 徐达.专用汽车构造与设计[M].北京:人民交通出版社,2008.
[2] 耿兴平,何黎娟.扫路车扫刷触地压力自控装置的研究[J].专用汽车,2009(09):61-62
The Comparative Study on the Self-adjustment Control System ofBrush Height off the Ground
Guo Jiapeng, Zhu Yang, Huang Zhenfeng, Cao Chenqiang, Ma Ying
( Technology Center, Shaanxi Automobile Holding Group Co., Ltd., Shaanxi Xi'an 710200 )
This paper analyzes the disadvantages of the general method to adjust the clearance height of road sweeper in the market at present, puts forward a variety of self-adjustment methods based on two kinds of floor clearance height struc -ture, introduces the structural principle of self-adjustment through the integration of machine, electricity and liquid (gas) technology, and conducts comparative analysis.
sweeper; ground clearance; self-adjustment; integration of machine; electricity and liquid (gas) technology
B
1671-7988(2018)20-145-03
U469.6+91
B
1671-7988(2018)20-145-03
U469.6+91
郭佳鹏,就职于陕西汽车控股集团有限公司技术中心。
10.16638/j.cnki.1671-7988.2018.20.053
