基于Advisor二次开发的6×4混合动力汽车建模与仿真
2018-10-26晁鹏翔范养强李江赵化刚申伶
晁鹏翔,范养强,李江,赵化刚,申伶
基于Advisor二次开发的6×4混合动力汽车建模与仿真
晁鹏翔,范养强,李江,赵化刚,申伶
(陕西重型汽车有限公司,陕西 西安 710200)
建立了6×4三轴汽车动力学模型,基于该模型对Advisor进行了二次开发。对牵引力耦合式并联混合动力汽车结构和控制策略进行了分析。搭建了某6×4牵引力耦合式并联混合动力汽车和与之参数相同的6×4传统燃油汽车Advisor仿真模型,进行了燃油经济性对比仿真分析。仿真结果表明:该牵引力耦合式并联混合动力汽车相比传统燃油汽车在山区高速工况下的油耗降低9.4%;牵引力耦合式并联混合动力汽车发动机工作点和发动机工作效率分布相对传统燃油汽车更加经济。
混合动力汽车;Advisor二次开发;燃油经济性;仿真分析
引言
随着全球能源危机以及环境污染等问题的逐渐加剧,新能源汽车已成为汽车工业发展的必经之路[1],然而受蓄能装置性能的影响,目前纯电动汽车技术仅用于部分乘用车和轻载短途商用车上[2],因此混动技术被认为是过渡时期商用车节能减排发展的最佳途径[3]。目前国内对混动技术的研究多集中在城市公交、短途运输和乘用车上,对于中长途商用车混动技术研究较少。
仿真计算是研究混合动力技术的重要手段,目前国内外主流混动动力技术仿真软件有Cruise、CarSim、PAST和Advisor等,其中Advisor由于其开源性被广泛使用于各大车企[4],本文对Advisor进行了二次开发,建立了6×4三轴汽车整车仿真模型,并基于该模型搭建了6×4牵引力耦合式并联混合动力汽车仿真模型,对该混合动力汽车的燃油经济性进行了仿真研究。
1 6×4三轴汽车动力学模型建立
设6×4三轴汽车在坡度为的路面行驶,加速度为,整车质量为,空气阻力、加速阻力、坡道阻力、滚动阻力分别为F、F、F和F,前轴载荷为F1,中桥载荷为F2,后桥轴荷为F3,各轮驱动力分别为F1、F2和F3。前轴距质心距离为,中桥距质心距离为,前轴距中桥距离为,前轴距后桥间距为,中桥距后桥距离为,整车质心高度为h,前轴、中桥、后桥悬架刚度分别为1、2、3,重力加速度为。
设汽车初速度为0,最高车速V,各轮滚动阻力系数分别为1和2,对其进行受力分析如图1所示:

图1 6×4三轴汽车受力分析
根据运动学定律可得:

其中:




v为迭代步长内的平均车速。

a为迭代步长内的加速度。

F为满足附着条件下的最大驱动力,设路面最大附着系数为μ则:

忽略空气阻力和滚动阻力对前轴取距:

根据受力分析可得:


结合式(9)、式(10)和式(11)可得(F2+F3)。
即可得到F,将式(2)~式(5)以及F带入式(1)得到关于v的一元二次方程:

结合式(6)、式(7)、式(8)、式(12)以及(F2+F3),最终得到驱动轮达到附着极限时迭代步长内的最大末速度V。
对于制动工况,当驱动轮发生制动附着极限时,其最大制动力F=-F,带入式(1)得到关于平均车速v的一元二次方程:

结合式(6)、式(7)、式(8)、式(12)以及(F2+F3),最终得到制动工况下制动轮达到附着极限时,迭代步长内的最小末速度V。
同时需要考虑每个步长内对驱动力和制动力的限制[5],根据地面附着条件,结合式(9)、式(10)和式(11)可得(F2+F3),代入式(8)即可得到最大驱动力F。地面最大制动力为全轮制动时极限附着条件下的制动力。即:

2 Advisor多轴混合动力汽车模型开发
Advisor是基于MATLAB/Simulink环境开发的一款高级汽车仿真软件。其主要用于新能源汽车动力性和经济性仿真分析[6]。由于其开源特性,目前该软件已被大量应用于新能源汽车等领域。然而目前该软件只有两轴前轮驱动型汽车仿真模板,对于后轮驱动汽车、四轮驱动汽车和多轴商用车尚未涉及。本文根据6×4三轴汽车动力学分析结果,对Advisor进行二次开发,建立6×4三轴汽车仿真模型。
2.1 整车动力学仿真计算模块建立
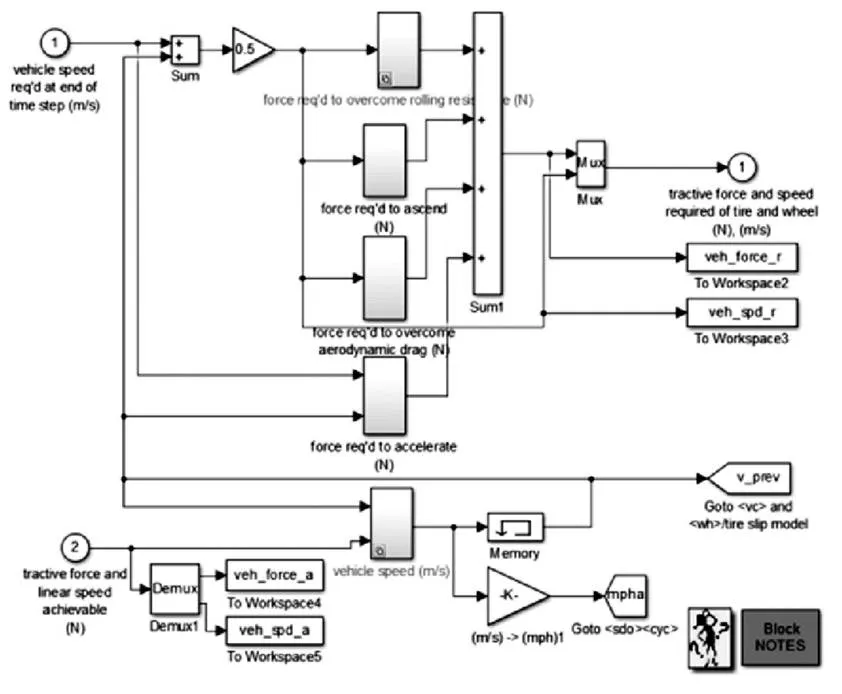
图2 整车动力学模型
整车动力学仿真计算模块包括前向计算模块和后向计算模块,其中前向计算模块是根据车轮车轴传递来的实际牵引力和车速,经vehicle speed子模块计算得到后向模块需求车速计算步长内的初始车速0。后向计算模块是根据整车动力学模型计算汽车需求车速和牵引力。根据6×4三轴汽车动力学分析过程,建立整车动力学模型结构如图2所示。
2.2 牵引力控制模块建模
牵引力控制模块主要用于限制计算的牵引力、制动力不超过轮胎与地面的最大附着力。整车需求速度不能超过最大牵引力所能提供的最大车速。
该模块由驱动力/制动力限制下的需求车速计算子模块和驱动力/制动力限制子模块组成。根据第一部分计算的加速/制动工况迭代步长内的末速度V,结合整车动力学计算模块后向计算模块所得到的初始车速0。根据式(6)即可得到当前步长内汽车的平均车速v。根据迭代步长内的末速度V的计算公式得到驱动力/制动力限制下的需求车速计算子模块,如图3所示。通过式(14)可得驱动力/制动力限制子模块模型,如图4所示。

图3 驱动力/制动力限制下的需求车速计算子模块

图4 驱动力/制动力限制子模块
3 牵引力耦合式并联混合动力汽车模型建立
3.1 牵引力耦合式并联混合动力汽车结构
目前,混合动力汽车的动力布置方式有串联式、并联式和混联式三种结构,不同结构具有不同的优劣势,本文以牵引力耦合式并联混合动力结构为目标,研究Advisor在多轴驱动混合动力汽车中的应用。如图5所示,牵引力耦合式并联混合动力汽车的动力系统由两根驱动轴、发动机、电机等构成,其中发动机为一轴提供动力,电机为二轴提供动力,蓄电池为电机提供电能。

图5 混合驱动模式
3.2 牵引力耦合式并联混合动力汽车控制策略
牵引力耦合式并联混合动力汽车一般具有辅助驱动,制动能量回收,发动机负荷率调节等功能,辅助驱动工况下发动机为一轴提供动力,同时电机为二轴提供动力,该功能能够增大汽车瞬时驱动力,提高汽车脱困能力。制动能量回收工况如图6所示,该工况下制动轮通过传动系统带动电机反转产生电能,并存入蓄电池中。发动机负荷调整主要针对发动机在低负荷区时由系统拉高发动机负荷,同时拖动后轮并带同电机进行反转发电。

图6 再生制动模式
3.3 基于Advisor的混合动力汽车模型建立
根据驱动力耦合式并联混合动力汽车结构,在Advisor中分别建立循环工况、整车模块、车轴车轮模块、差速器模块、变速箱模块、离合器模块、电机模块、电池模块、发动机模块、后处理模块以及控制模块,最终得到驱动力耦合式并联混合动力汽车顶层仿真模块如图7所示。

图7 驱动力耦合式并联混合动力汽车顶层仿真模块
4 牵引力耦合式并联混合动力汽车性能仿真
4.1 设置仿真参数进行仿真分析
在MATLAB/Simulink中搭建好仿真模型后,将发动机参数、电机参数、整车参数等进行逐个设置,并修改相应m文件,同时制定仿真CYC—HWFET行驶工况,然后启动Advisor并进行界面参数选择和调整,如图8所示。之后进行路面、电池初始状态等设置,如图9所示。

图8 整车参数调整界面

图9 路面及加速、爬坡性能设置界面
4.2 整车燃油经济性仿真分析

图10 传统燃油车仿真结果

图11 牵引力耦合式混合动力汽车仿真结果
为了研究牵引力耦合式并联混合动力汽车在燃油经济性方面的优越性,本文选用路况较为复杂的山地高速作为仿真循环工况,如图9所示,并选用与之参数相同的传统燃油汽车进行对比仿真。仿真结束后输出仿真结果,其中图10和图11分别为传统汽车和牵引力耦合式并联混合动力汽车燃油消耗情况、工况跟随情况、发动机特性及档位变化情况仿真结果,图12和图13分别为传统汽车和牵引力耦合式并联混合动力汽车发动机工作点分布图,图14和图15分别为传统汽车和牵引力耦合式并联混合动力汽车发动机工作效率分布图。

图12 传统燃油车发动机工作点分布图
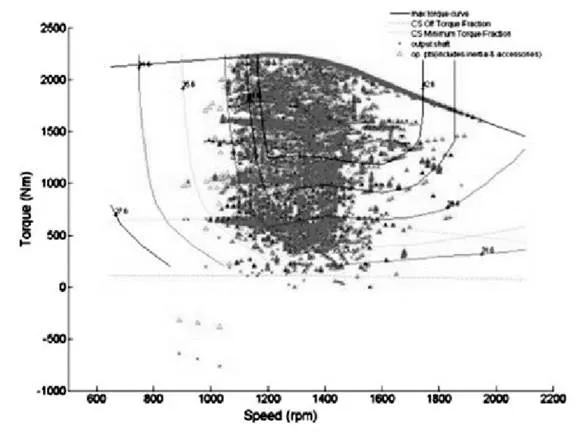
图13 牵引力耦合式混合动力发动机工作点分布图

图14 传统燃油车发动机工作效率分布图

图15 牵引力耦合式混合动力汽车发动机工作效率分布图
从图10和图11可以看出传统汽车发动机跟随情况没有牵引力耦合式并联混合动力汽车好,这是由于传统汽车动力性有限,进而制约了脱困能力造成的,同时从图10和图11还可以看出传统燃油汽车的百公里油耗为40.5L/100km,牵引力耦合式并联混合动力汽车的百公里油耗为36.7L/100km,因此该混合动力汽车油耗相比传统燃油汽车降低9.4%,从传统燃油汽车发动机工作点分布图12和牵引力耦合式混合动力发动机工作点分布图13可以看出,传统燃油汽车发动机工作点分布较为发散,其在低负荷区也分布了较多工作点,而牵引力耦合式混合动力发动机工作点分布大多集中在经济区,该结论从传统燃油车发动机工作效率分布图14和牵引力耦合式混合动力汽车发动机工作效率分布图15也可以得出,同时从发动机效率分布图还可以看出,牵引力耦合式混合动力汽车发动机工作效率大多集中分布在40%以上的高效区,而传统燃油车发动机工作效率分布较为发散。
5 结语
(1)建立了6×4汽车动力学模型,并基于该模型对Advisor进行了二次开发,建立了6×4汽车Advisor仿真模型。
(2)分析了牵引力耦合式并联混合动力汽车结构及控制策略,分别搭建了6×4传统燃油汽车和6×4牵引力耦合式并联混合动力汽车Advisor仿真模型。
(3)利用Advisor仿真软件对6×4牵引力耦合式混合动力汽车和与其参数相同的传统6×4燃油汽车进行了仿真,对
仿真结果进行了对比分析,结果显示,在山地高速循环工况下,牵引力耦合式并联混合动力汽车相比传统燃油汽车油耗降低9.4%,牵引力耦合式并联混合动力汽车发动机工作点和发动机工作效率分布点集中分布在高效区,而传统燃油汽车发动机工作点和发动机工作效率分布点分布较为发散。
[1] 田香玉,曲金玉,殷允朝,等.基于Advisor仿真软件的二次开发及其在液压混合动力车上的应用[J].液压与气动,2016,(2):23-29.
[2] Karen L. Butler,Mehrdad Ehsani, Preyas Kamath. A Matlab-based Modeling and Simulation Paekage for Electric and Hybrid Electric Vehicle Design. IEEE Transaction Vehicle Technology. VOL48,NO. 6,1999.
[3] 曾小华,王庆年,王伟华.基于ADVISOR软件的双轴驱动混合动力汽车性能仿真模块开发[J].汽车工程,2003.
[4] Wang Liangmo, Bai Weijun. Development and simulation of electric vehicle based on ADVISOR [J]. Jounral of Southeast University (English Edirion), 2006, 22(2):196-199.
[5] 余志生.汽车理论[M].北京:机械工业出版社.2009:75-88.
[6] 凌滨,王博强,卢晓琳.混合动力汽车功率分配管理优化研究[J].计算机仿真,2017,34(5):156-161.
Modeling and simulation of 6×4 hybrid electric vehicle based onADVISOR redevelopment
Chao Pengxiang, Fan Yangqiang, Li Jiang, Zhao Huagang, Shen Ling
( Shaanxi Heavy Duty Automobile Co, Ltd, Shaanxi Xi'an 710200 )
A 6×4 three axis vehicle dynamics model is established and the advisor is redeveloped based on this model. The structure and control strategy of traction coupled parallel hybrid vehicle is analyzed. A 6×4 three axis traction coupled parallel hybrid vehicle and a 6×4 conventional fuel vehicle simulation advisor model with the same parameters is built, comparative simulation analysis of fuel economy is carried out. The simulation result show that: Compared with the traditi -onal fuel vehicle, the fuel consumption of this traction coupled parallel hybrid vehicle is reduced by 9.4% at mountainous area highway; The engine working point and engine efficiency distribution of this traction coupled parallel hybrid vehicle is more economical than those of traditional fuel vehicle.
Hybrid car; Redevelopment of ADVISOR; Fuel economy; Simulation analysis
A
1671-7988(2018)20-11-05
U463.4
A
1671-7988(2018)20-11-05
U463.4
晁鹏翔,就职于陕西重型汽车有限公司汽车工程研究院,工程师,主要从事底盘各系统技术开发及应用。
10.16638/j.cnki.1671-7988.2018.20.004
