机舱区域人员疏散仿真分析
2018-10-25叶正华黄志刚蒲晓亮
叶正华,黄志刚,蒲晓亮
1中国船舶及海洋工程设计研究院,上海200011
2哈尔滨工程大学动力与能源工程学院,黑龙江哈尔滨150001
0 引 言
现代船舶具有体积庞大、乘员人数众多、结构复杂等特点。一旦在船舱中突发危险情况,例如:火灾、海水倒灌等,人身安全将遭受严重威胁。在此背景下,研究如何高效安全地疏散舱室内的人员具有重要的研究价值。
从20世纪50年代至今,国内外学者针对船上人员的疏散问题进行了大量的研究。陈淼[1]进行了舰船通达性仿真评估研究,使用基于网格法的疏散模型计算了人员的疏散时间;Lo等[2]开发了网络网格方法(SGEM)模型;Henderson[3]将多人员的疏散行为模拟成流体的流动,定义了多人员疏散的移动方式和速度。上述文献主要针对舱室的结构特点,模拟火灾发生时人员疏散的情况和时间,估算伤亡情况,评估、检验建筑物的消防设计。
前人文献中提出的模型及方法均以人员舱室建筑物为主,不能完全满足机舱环境的疏散情况。机舱内由于通道普遍比较狭窄,通往安全区域的出口有限,且设备繁多,因此,建立合理的疏散模型,是机舱区域人员疏散的研究重点。本文在船舶机舱复杂环境的模型基础上,拟提出机舱中的人员疏散方案,以获得机舱环境中人员疏散的时间和路线评估结果,为机舱环境中设备布置和人员疏散方案提供理论依据和技术参考。
1 人员疏散模型结构
1.1 模型结构功能划分
在实际人员疏散过程中,个人的行为动作和决策同时受内部状态、外部环境因素的影响以及与其他人员之间的相互影响。因此,通过模型结构的功能划分,建立了机舱人员的疏散模型(图1)。
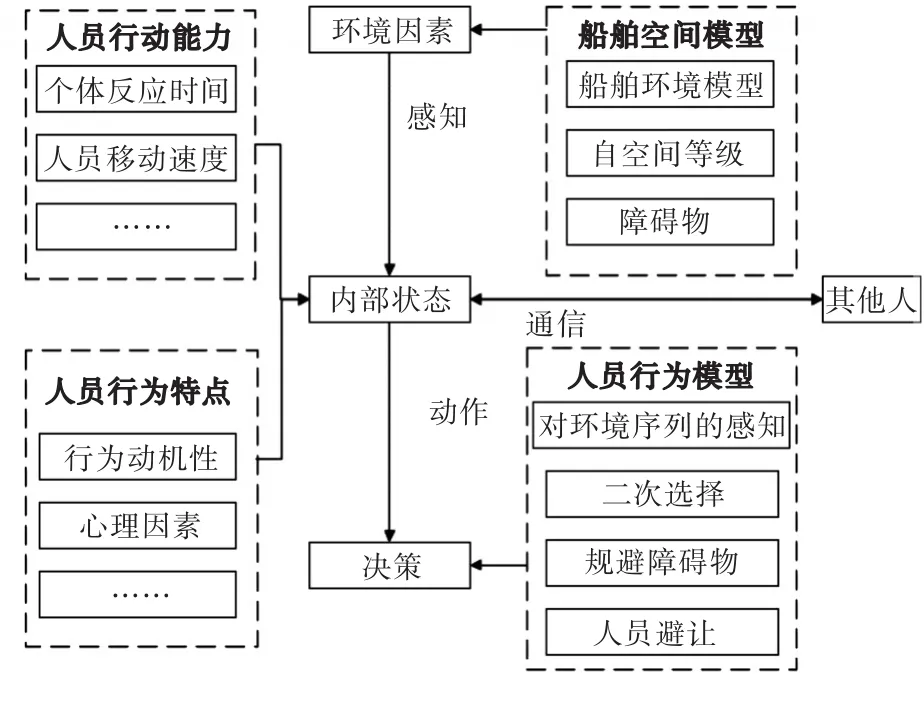
图1 人员疏散模型结构图Fig.1 Structure diagram of personnel evacuation model
由图1可见,人员疏散模型主要包括内部状态、环境因素和决策3部分。内部状态由人员行动能力及其行为特点模块组成,环境因素由船舶空间模型模块组成。内部状态首先感知到环境因素,然后做出动作,与其他人员互相影响,并做出决策动作,决策动作又包含了人员行为模型模块。
1.2 人员属性模型
在人员属性模型中,基本属性包含尺寸、反应时间、速度、位置。具体定义如下:
1)尺寸:人员的身体尺寸,不同的身体尺寸会对疏散带来不同的影响。
2)反应时间:从危险情况突发时刻开始到人员开始疏散所用的时间。
3)速度:人员在机舱开阔区域环境下的最大移动速度,即区域人员密度足够小的情况下的最大移动速度。
4)位置:人员所在点的圆形区域所占据的位置,通过其空间坐标(x,y)来表示。
本文假设人员属性模型固定,以男性标准身材1.78 m为标准,肩宽在390~410 mm之间;在水平通道上的平均疏散速度是人流密度的函数。Thompson等[4]在 Simulex模型中给出了在人员之间距离影响下的疏散速度曲线。通常情况下,人员行走速度不受其他个体影响,为自由移动状态,移动速度为1.2 m/s;而在火灾等紧急情况下[5],人员有恐惧感,相同人员密度下的移动速度增大至2.4 m/s,且速度随着所在区域的人员密度的增加而降低。人员属性模型如图2所示。
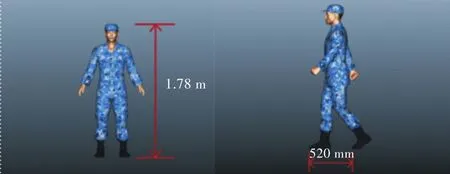
图2 人员属性模型Fig.2 Personnel attribute model
1.3 对环境序列的感知
从图1可以看出,疏散人员可感知机舱的环境序列 Environment[6]:

式中:Space为疏散人员所在区域的子空间及其空间安全等级;Exit为当前甲板的安全出口(假定疏散人员可以感知到所处甲板空间的所有出口,并且能进一步知晓通往出口的下一个子空间的安全等级);Obstacle为疏散人员所处的甲板及其子空间内的障碍,其参数包括位置、尺寸和类型。
(6)二级检查制度。作业人员自查、生产单位质检机构的最终检查是保证成果质量的重要环节。类似空间参考系、文件命名、线线相交、线面相交、极小面、极短线等问题只要进行严格的二级检查是完全可以避免的。
1.4 人员移动方式
人员移动方式采用基于最短路径的集合方法,避让模型包含3部分,分别为碰撞检测、行为决策和人员避让。假设条件如下:
1)人员总是以最短路径的方向向前运动,无需考虑身后因素的影响;
2)人员总是以最大速度前进,当所在区域的人员密度增加时速度才会降低。
遇到障碍物时,人员应在综合考虑后选择出口和短期目标位置,并绕过障碍物。碰撞检测方程为
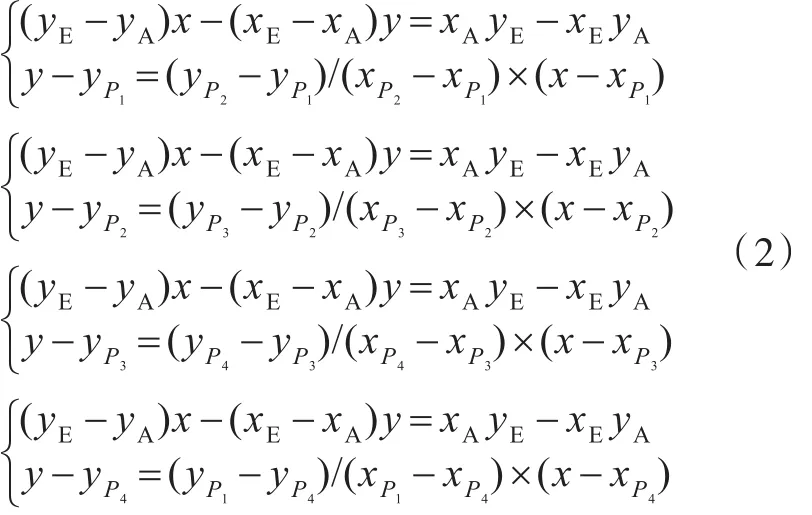
式中:(xA,yA)表示人员起始点A点的坐标,(xE,yE)表示当前空间出口的坐标,(xPi,yPi)(i=1,2,3,4)分别表示 P1,P2,P3,P4的坐标;每组二元一次方程的第1个方程为无视障碍视线方程,第2个方程为矩形障碍物的边线方程。4组二元一次方程中,若有1个方程组有解,则表明碰撞发生。
矩形障碍物的规避情况如图3所示。根据最短路径方法,以与无障碍视线AE夹角最小(α1<α2)的顶点为目标点,可见 P1为目标点,疏散时应从P1处进行疏散。
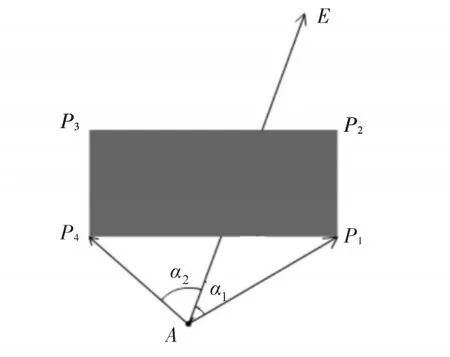
图3 矩形障碍物的规避Fig.3 The avoidance of rectangular obstacles
图4表示人员正前方有另外一个人的情况,若此时人员继续按照原来的目标方位移动,就会与前方的障碍物相撞,碰撞检测算法为[7]

式中:(xB,yB),(xC,yC)分别为人员B和C的中心位置坐标,rB和rC分别为两人的体型半径,vC为人员C的移动速度。不考虑人员的绕行,当出现前后相随情况时,一直保持人员的相随状态进入排队区域。
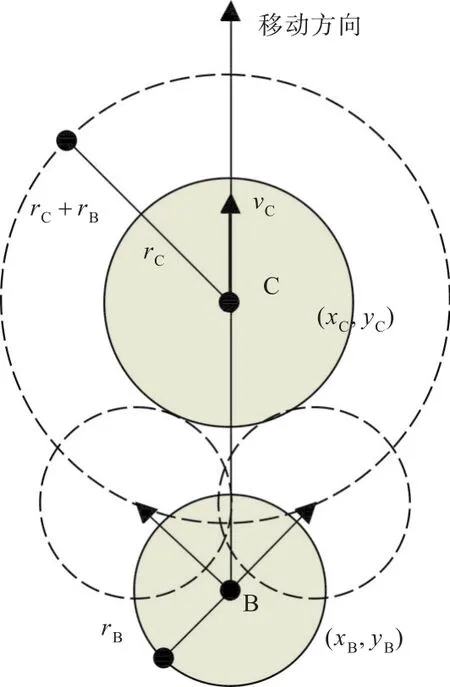
图4 人员避让规则Fig.4 Personnel avoidance rule
2 机舱疏散空间模型
2.1 机舱环境结构
利用本疏散模型对机舱环境进行划分,结构如图5所示。以Ei表示舱室的子空间,Ei包括舱室、走廊Ci和楼梯Si。Di表示连接Ei的门以及Ci通往Ei的狭窄区域。
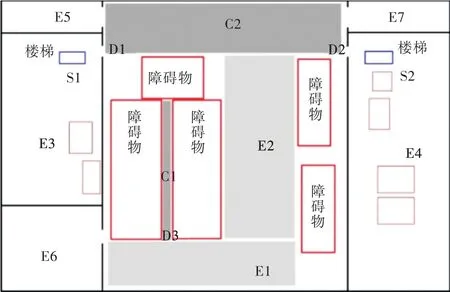
图5 机舱环境的空间划分Fig.5 Spatial division of the main engine room environment
2.2 安全等级划分
空间环境中各空间的状态不同,在疏散过程中,以SP0表示危险区域和大型设备夹缝区域,SP1表示主要舱室,SP2表示有楼梯的舱室,SP3表示通往上层安全区域的楼梯。机舱安全等级划分结果如图6所示,疏散人员可根据自己所在的节点空间安全等级来判断下一步的行动路线。
在对路径进行总体规划时,疏散人员将按照由低到高的安全等级选择即将经过的子空间。在机舱某区域发生危险情况时,安全等级顺序为SP0<SP1<SP2<SP3,进入上一层甲板是更为安全的逃生方式[7]。

图6 机舱安全等级划分Fig.6 Safety classification of main engine room
2.3 障碍物的仿真表达和数学表达
障碍物是一种阻挡逃生人员通过的结构体,当遇到障碍物时,人员会被其阻挡无法通过而停止逃生,此时需要寻找其他逃生路线。障碍物会影响人员疏散的速度。仿真时,障碍物模型的形状、尺寸、与出口的相对位置都是需要重点考虑的因素。为方便计算,将障碍物进行简化,根据障碍物的外部轮廓将其分为立方体、圆柱和平面3类,并进行三维建模。主机仿真结果如图7所示,支柱仿真结果如图8所示。基于外部轮廓的仿真结果,最终建立了如图9所示的机舱区域仿真模型。
在仿真模型中,通过坐标和长度标识来表示障碍物的位置、形状和大小。形如墙体的面状结构采用面片形表示,数学表达式采用起始点P1(x,y)和终止点P2(x,y)表示;方形设备采用矩形表示,数学表达式采用矩形的4个顶点坐标Pi(x,y)表示;支柱采用圆形表示,数学表达式采用圆心P(x,y)和半径R表示。
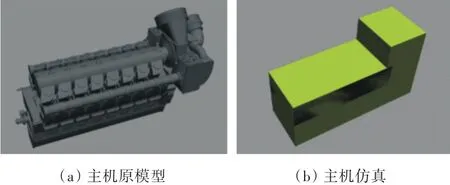
图7 主机模型仿真结果Fig.7 The simulation of main engine model
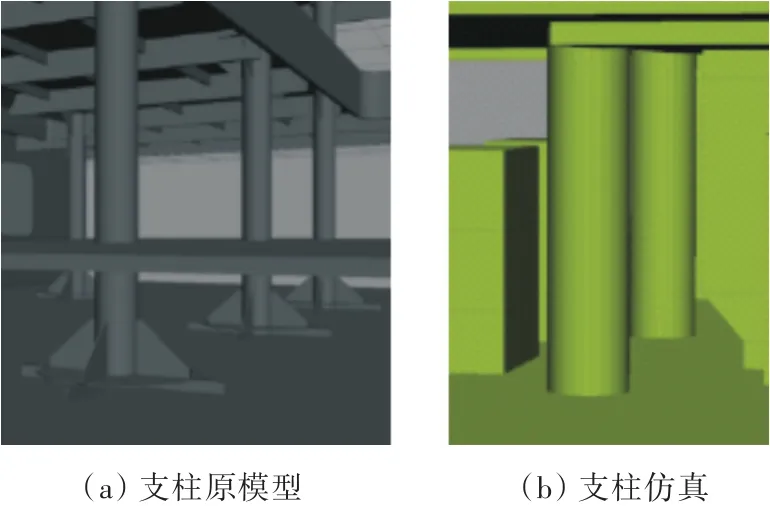
图8 支柱模型仿真Fig.8 The simulation of pillar model
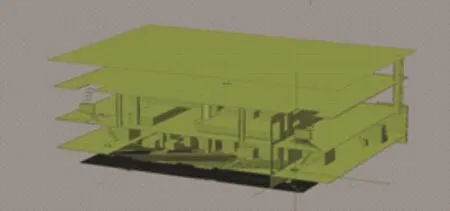
图9 机舱区域模型仿真Fig.9 The simulation of main engine room model
3 基于Unity 3D软件的机舱人员疏散模型仿真
本文采用Creo软件绘制船体结构模型、大型设备模型及其他设备模型,通过3D MAX软件对模型进行了轻量化处理,满足Unity 3D软件的实时渲染。同时在Unity 3D软件中对障碍物进行轻量化定义,便于在人员疏散时进行碰撞仿真。最后通过OpenGL软件的图像流处理,对模型单元进行定点描述[7],采用智能寻路算法对机舱内的人员进行疏散路线模拟,基于人的从易行为和从近行为对碰撞情况进行仿真处理。
以四机四桨的民船机舱为疏散环境模型,灾害种类以火灾为主。在疏散过程中,遇到火灾警报时,机舱中的人员需要避开火灾区域,通过尽量短且安全的路线向上层甲板疏散。
3.1 系统模块设计及建模
疏散模型系统由4个模块组成,分别是图形处理模块、前处理模块、数据处理模块、结果显示模块。仿真模块结构如图10所示[8]。
图形处理模块的主要功能包括:1)绘制机舱及人员的三维模型;2)绘制机舱区域人员的疏散过程;3)通过鼠标操作,实现对场景的缩放、平移、旋转等视角操作。
数据处理模块的主要功能包括:1)计算疏散人员的移动速度,根据疏散人员的属性特征及所在区域,判断其在当前时刻的最大移动速度;2)对人员行经路径进行规划,依据图6的子空间安全等级和出口数量选择出口,根据1.4节的障碍物避让方式选择最优疏散方向;3)当多人同时进行疏散时,首先依照单人疏散方法,在选择出口和最优疏散方向后,对多个疏散个体进行实时定位,计算人员之间的距离,根据1.4节的人员避让方式处理碰撞情况。
结果显示模块的主要功能包括:1)显示疏散时间;2)显示疏散路径;3)多人疏散时对疏散个体进行定位。
采用Creo软件建模,并通过3D MAX软件优化模型。将机舱疏散模型导入Unity 3D软件,显示如图11所示。
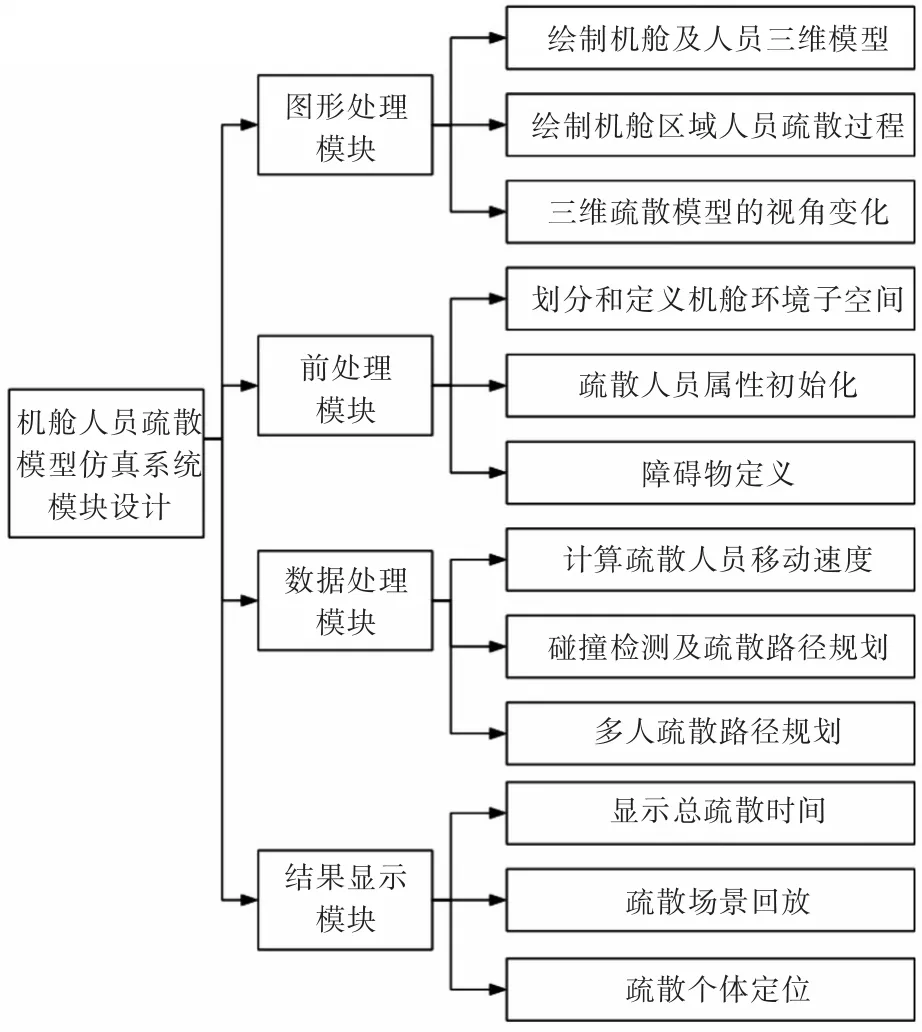
图10 机舱人员疏散模型仿真系统模块设计与划分Fig.10 Design and division of simulation system modules of ship engine room evacuation model
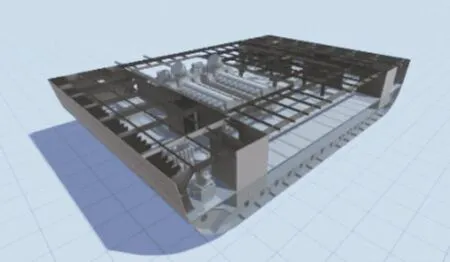
图11 人员疏散场景Fig.11 Personnel evacuation scenario
3.2 单人疏散
疏散界面中有4个人员工作区域,单人疏散过程如图12所示,区域C1为主机夹缝,区域E1为集控室,区域E2和C2为甲板中间的开阔区域。
当人员从E1区域进行疏散,往甲板中央区域前进。通过E1左侧区域(船体右舷)、E2区域、C2右侧区域(船体左舷),进入右侧(船体左舷)的D2门,通过S2楼梯向上层甲板移动。仿真疏散路线如图13所示。
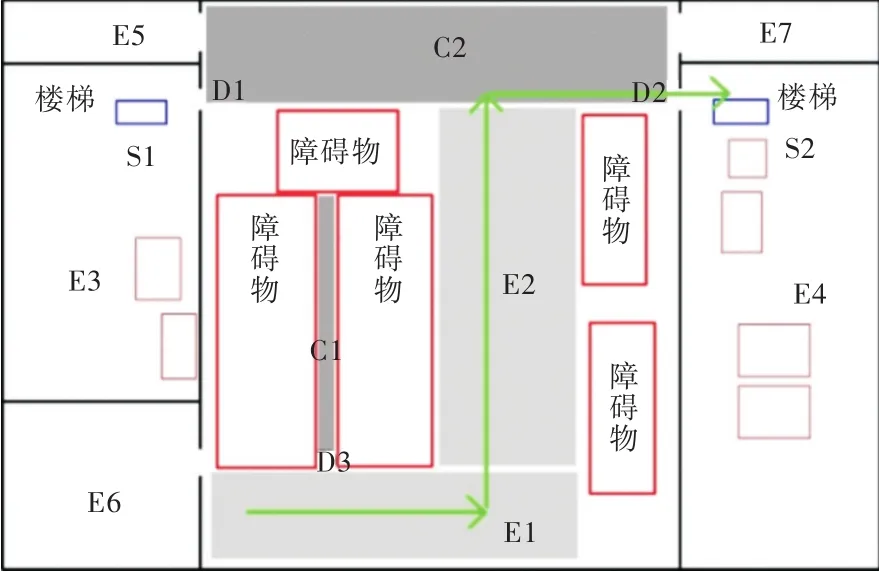
图12 区域E1单人疏散过程Fig.12 The solo evacuation procedure of area E1
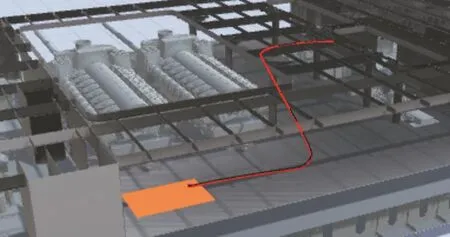
图13 区域E1单人疏散路线Fig.13 The solo evacuation of area E1
3.3 多人疏散
多人疏散时,人员初始工作区域固定。依照最优疏散路线,所有人员通过楼梯向上层甲板进行疏散。多人疏散的起始状态如图14所示,多人疏散路线如图15所示。
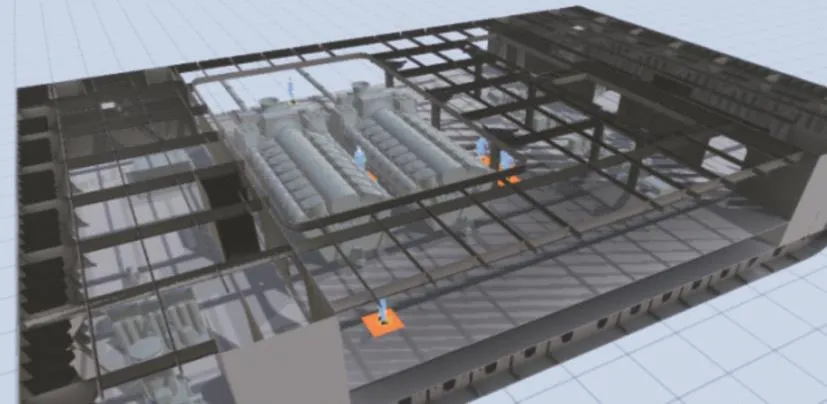
图14 多人疏散场景Fig.14 Multiple evacuation scenarios
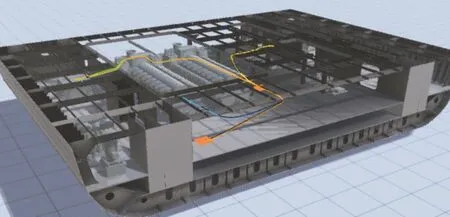
图15 多人疏散路线Fig.15 Multiple evacuation processes
在多人疏散仿真中,疏散完成时可以浏览每一个工作区域人员的疏散情况,如区域C1人员的疏散情况如图16所示。
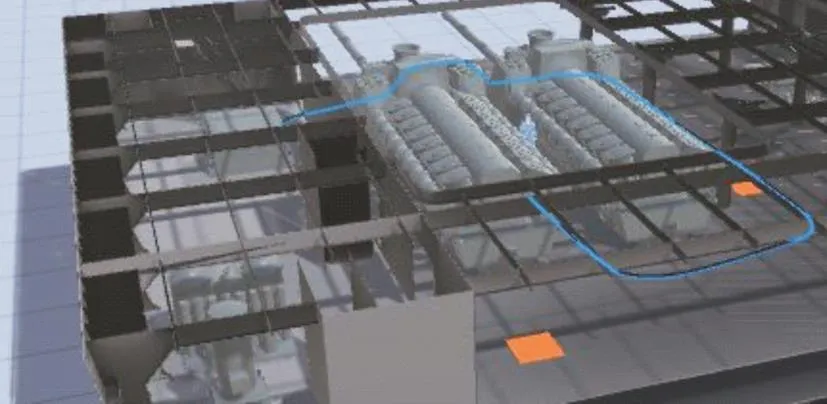
图16 区域C1人员的疏散情况Fig.16 Personnel evacuation situation in area C1
4 结 语
详细分析了机舱布置特点以及疏散人员的属性特点和行为模式,划分了机舱环境结构,定义甲板、走廊和楼梯为环境子空间。这些环境子空间具有不同的安全等级,根据这些子空间的连接情况与安全等级完成人员疏散的总体路径规划;采用Creo软件绘制模型,采用Unity 3D软件建立疏散仿真系统,模拟特定情况下各工作区域的机舱人员对路径的选择,生成路线图,为机舱中人员的疏散方式提供参考。
