EAST上基于图像显著性的快速边缘提取算法
2018-10-24谢更新罗正平
谢更新 张 恒 罗正平
1(中科院等离子体物理研究所 安徽 合肥 230031)2(中国科学与技术大学 安徽 合肥 230026)
0 引 言
EAST超导托卡马克是我国自主设计建造的国际上第一个全超导托克马克核聚变研究装置[1]。EAST具有国际热核聚变实验堆[2](ITER)类似的先进技术,具有与ITER类似的超过1 000 s的长脉冲高参数运行能力,已经取得了超过400 s的偏滤器位形等离子体以及稳定重复的超过100 s的长脉冲“高约束模”等离子体,创造了新的记录。EAST致力于解决ITER及未来聚变堆高性能稳态运行相关的关键物理和工程问题。
在托克马克装置中重建等离子体位置和形状是实时控制等离子体放电的重要基础。对控制托克马克装置的等离子体位形进行实时控制可以优化等离子体的运行时的参数,减少某些不稳定性的发生,控制真空室壁和偏滤器靶板上的热负荷和粒子沉积,减少对真空室内部件的损伤[3]。
现阶段运行的托克马克装置中,大都采用磁测量的方式获取装置的磁场和磁通信息,通过平衡反演算法,如:EFIT[4-5],获取等离子体的最外层磁面及其他的等离子体信息。但是,磁测量受装置的电磁环境影响较大,其本身也存在着一些问题,诸如数据漂移、线圈校准的敏感性[6]。
为了解决磁测量的这些问题,开发一套新的等离子体边界重建系统对托克马克装置未来的发展很有必要。随着托克马克装置上诊断技术的完善和计算机性能的提高,基于计算机视觉和高速可见光诊断系统的等离子体边界重建技术逐渐进入研究者的视野。从图像中提取等离子体的边缘可以避免磁测量对磁通的时间导数进行积分带来的磁通测量的漂移,提供更直接的等离子体边缘诊断方法。国内外的研究者也不断投入到托克马克装置上的高速可见光诊断系统的研发及基于可见光诊断系统的边界识别系统。如MAST、TCV等[6-8]。
但是,基于图像数据的等离子体边缘提取依旧面临着一些需要解决的问题。要想实现基于可见光的托克马克等离子体位形控制,首要的就是开发快速的图像处理算法,满足EAST上等离子体控制系统(PCS)的实时性要求。系统的实时性是指系统能在限定的时间里完成指定的任务并对外部事件做出及时响应的能力[9]。EAST上的位形控制对系统的时间延迟要求一般在百微秒左右,对诸如等离子体垂直不稳定性事件(VDE)等快速的等离子体不稳定性事件进行控制对系统的时间延迟要求更为严苛。传统的Canny算子[10-11]和Sobel算子[11]在边缘检测领域具有良好的表现。可是,在实际应用中发现,由于可见光诊断系统采集到的图像数据一般存在着噪声。同时,EAST真空室壁在放电过程中也会反射光线,在远离等离子体边界处形成新的灰阶梯度,基于梯度设计的Canny算子和Sobel算子会提取出比较丰富的边缘。这些丰富的边缘信息在等离子体的边缘提取中会带来更多的其他操作。因为我们需要识别的等离子体边缘实际上是一条封闭的曲线,检测到的其他边缘需要进行必要的图像预处理和后续的筛选,将会影响系统的实时性。为了解决这一个问题,TCV上的处理系统在光学系统中加入滤波镜片,可以将可见光的光谱滤到466 nm附近[7]。完善的光学滤波使得TCV上的系统可以采用传统的梯度算子进行边缘提取工作,即使如此,在TCV上的实际应用中,依旧需要手动选取ROI区域,以减少在灰阶变化平缓区域所产生的不必要的时间开销。通过光学滤波和手动选取感兴趣区域(ROI),TCV上的研究将系统的延迟降低到了1~2 ms,基本满足位形实时控制时对系统的延迟性的要求。而在EAST上,可见光系统的光学滤波还有待发展,近期基于梯度算子的边缘处理方法[8]也未能提供有效的边界识别。
有鉴于此,在分析了EAST的等离子体图像信息后,本文提出了一种基于图像显著性的等离子体边缘检测技术。该方法能够有效地识别出EAST可见光系统采集到的图像中等离子体边缘,且花费的时间比传统的Sobel算子和Canny算子要少很多。
1 显著性算法
1.1 概 述
图像显著性算法[12]是一种模拟人眼视觉注意力机制的图像处理算法。当人眼看到一幅图像的时候,会迅速捕捉图像中与背景不同的显著性区域,并忽视图中的背景部分。认知实验表明,图像中的确存在着这些显著性区域,并且在这些区域中包含有图像较多的信息。图像显著性算法通过对人类视觉认知过程建模,以此为基础计算图像的显著性值,并应用到图像压缩、编码,目标分割、提取,图像边缘或区域加强等领域。
1.2 HC算法
心理学的研究发现,人们的认知系统对视觉信号的对比,如颜色、强度和纹理等,会比较敏感。基于这一假设,研究者们提出了一种通过颜色直方图快速计算图像像素级显著性图的算法[13]。在该算法中,图像I中的某一个像素点Ik的显著性值可以定义为:
(1)
式中:图像的像素点Ik的取值范围在[0,255]。
式(1)展开后,可以表述为:
S(Ik)=‖Ik-I1‖+‖Ik-I2‖+…+‖Ik-IN‖
(2)
式中:N表示图像的像素点数。给出一张输入图像,即可以根据式(2)计算出该点对应的显著性值。该方法能够简单有效地计算图像各像素的显著性值,并一次为依据,进行图像的区域划分和目标识别。
1.3 算法改进
基于EAST放电过程中拍摄到的图像质量,我们提出了一种基于HC显著性算法的改进算法。在新的算法中,各个像素点的显著性值被定义为:
女人的男朋友比她大一岁,属虎。两人在一起同居时男朋友经常跟她开玩笑地说,虎吃牛。女人就咯咯地笑,她喜欢被男朋友吃,确切点说是吃她的身体。男朋友在一所农业科研所里搞农作物的繁殖,很废寝忘食的。他不时地就出国考察,也下到全国各地的农村实验田里做试点。男朋友只有回到他们住的小屋里才会有笑容。

(3)
为降低算法的复杂度,对式(3)做进一步的简化,可以得到:


2 边缘提取
2.1 托卡马克等离子体边缘特点
托卡马克装置中,等离子体的边界定义为最外层闭合且不与第一壁相交的磁面LCFS(Last closed flux surface or separatrix)。在托卡马克装置的极向面上,等离子体的边界由最外层的闭合曲面,X点(偏滤器位形)和打击点构成。通常情况下,为了获得更高的等离子体性能,等离子体的边界和真空室壁的距离会很小。托卡马克装置放电过程中拍摄到的真空室内的图像显示,在可见光波段的辐射光谱主要集中在等离子体的边缘位置,并且由Hα辐射占主导地位。Hα辐射指处在n=3激发态的氢原子退激到n=2的过程中发射的辐射,其辐射的波长为656 nm,处在可见光的波长范围内。Hα辐射及其他一些Balmer辐射是托卡马克等离子体在边缘等位置出现辉光现象的主要原因。
在等离子体的边缘位置附近,因为等离子体不再受约束,等离子体的电子密度剖面和温度剖面出现明显的下降。在等离子体内部,等离子体的温度和密度很高,因而此部分等离子体主要由电离的电子和离子组成。而产生Balmer辐射的主要原因是中性氢原子和高能粒子的碰撞,在等离子体内部产生Balmer辐射的概率很低。在等离子体边缘外部,高能粒子密度很低,碰撞产生的激发态的氢原子数量也很少。没有激发态的氢原子,在等离子体边缘之外的区域,产生Balmer辐射的份额也很少。由此,可以看出,只有在等离子体的边缘位置,才有足够多的氢原子和高能粒子,保证有充足的处于激发态的氢原子,以产生Balmer辐射,形成辉光现象。Balmer辐射产生的原理使得我们观察到的等离子体边缘辉光位置和等离子体最外层闭合磁面的位置近似在同一个位置。
由以上的分析,我们可以得到托卡马克等离子体边缘的一些特点:
1) 托卡马克等离子体边缘在极向上是一个封闭的曲线,且靠近真空室壁;
2) 托卡马克等离子体边缘位置因为Balmer辐射发射可见光,和其他区域有明显的区别。
2.2 等离子体边缘提取
根据上文分析,等离子体边缘处能够产生更多的激发态的氢原子,那么相应的,等离子体边缘位置也会比其他区域更亮。在视觉上,等离子体边缘的位置也就更加的“显著”。
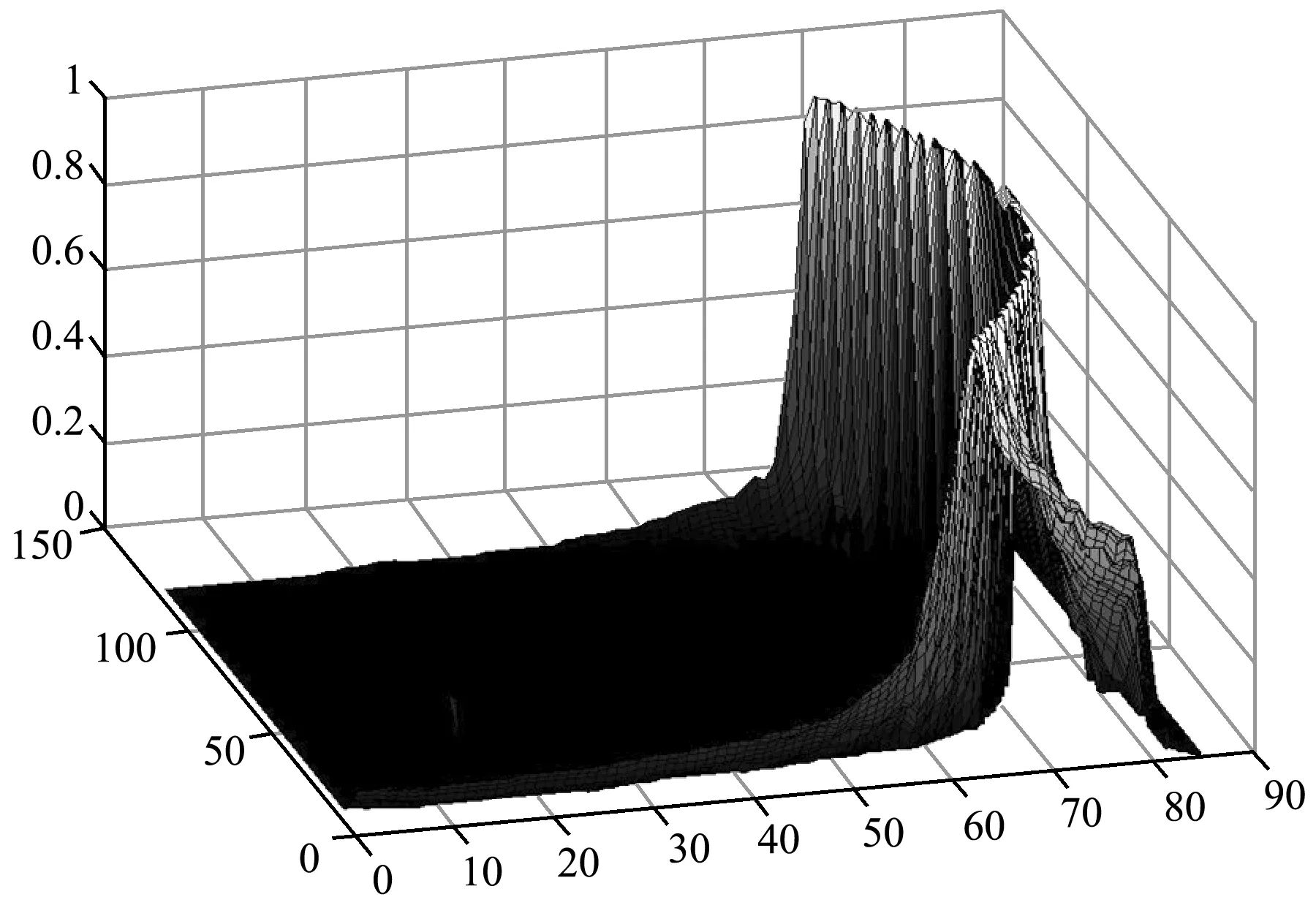
图1 EAST图像ROI区域归一化显著性值三维视图
为了更为简单地实现边缘提取,我们将等离子体区域划分为四个ROI区域。如图2所示。划分好ROI区域后,沿行或者列方向,显著性区域内显著性极大值只有一个,即为显著性值的最大值。在算法的实现上来说寻找最大值比寻找极值要更为简单。
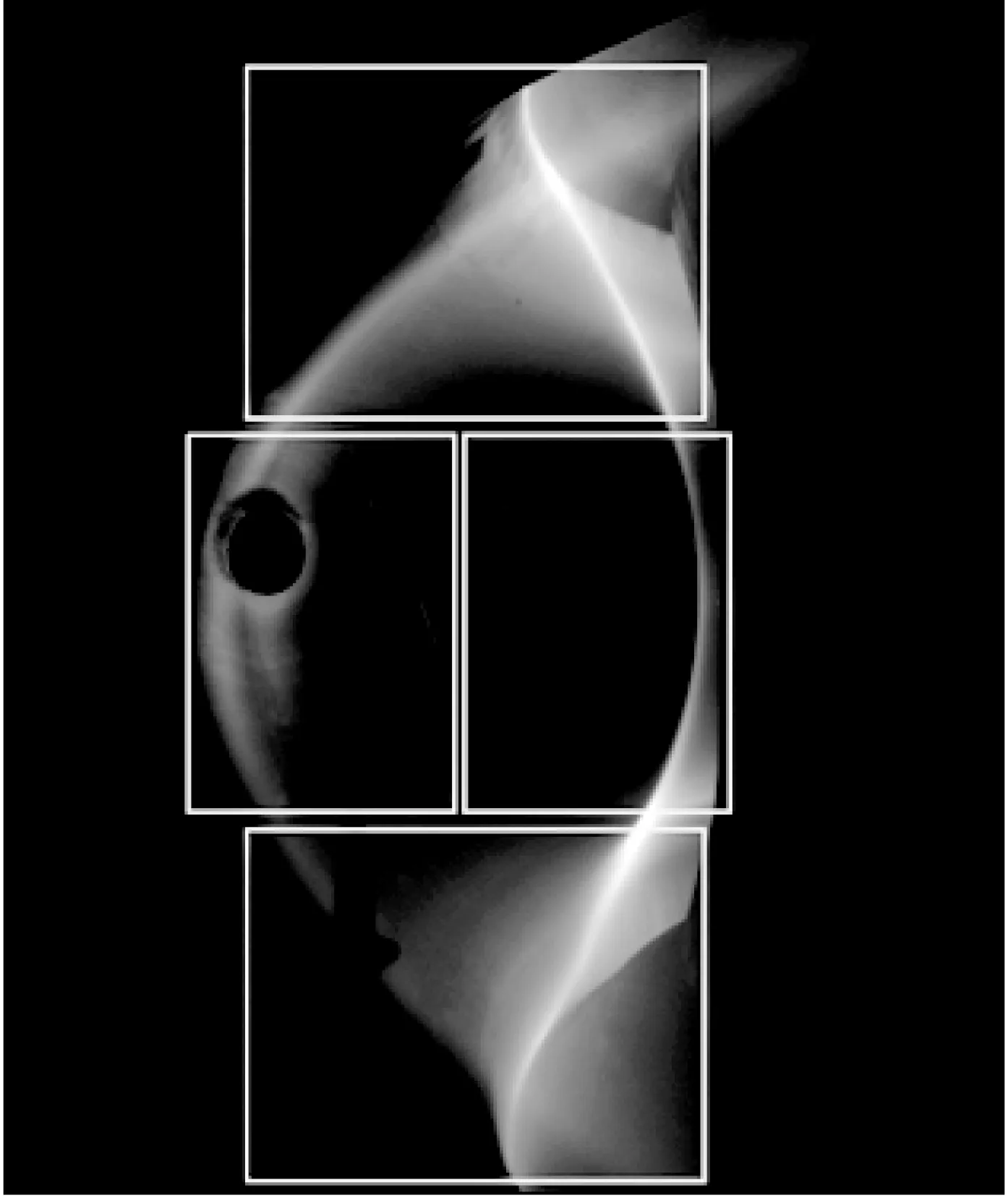
图2 EAST图像ROI区域划分
从显著性图中寻找显著性值最大值的位置不可避免地需要先通过比较各点的显著性值来获得,这样将会在非显著性区域花费大量的时间计算。根据等离子体边缘的特点,边缘是连续的封闭曲线,且边缘靠近真空室壁,那么在搜寻显著性最大值的时候,上一个最大值点已经确定时,下一行的极值点应该在上一个最大值点的附近。假设我们已经有一个包含已搜索完的边缘点集合Boundary={s1,s2,…,si},那么下一个边缘点si+1满足如下条件:
(4)
式中:s(i+1,j)为计算得到得的显著性值;len标示搜索范围的半长度,该值由相机采集到的图像分辨率确定,通常比图像的宽度要低一个数量级以上。
完成一整幅图像的搜索后,得到边缘点的集合Boundary就是图像中等离子体边缘的位置。算法伪代码如下:
Step1计算图像显著性值;
Step2划分ROI区域;
Step3ROI区域前pre_rows行搜索显著性极值,确定边界起始位置;
Step4给定搜索长度,由前一边缘点位置计算搜索范围;
Step5在给定的搜索范围内寻找显著性最值;
Step6搜索完成,生成边缘点集合Boundary。
3 实验结果与分析
实验分别选取了Canny算子、Sobel算子与本文提出的算法对图1中的同一个ROI区域进行计算。处理图像来自EAST 52050炮放电数据。图3展示三种算法的处理结果。表1统计了三种算法的用时。图4展示了新算法处理EAST放电过程中典型的几个阶段的结果。其中:(a)是EAST等离子体爬升段;(b)、(c)是等离子体平顶段,分别是在下偏滤器位置有异常亮斑和正常放电情况;(d)是等离子体下降段。
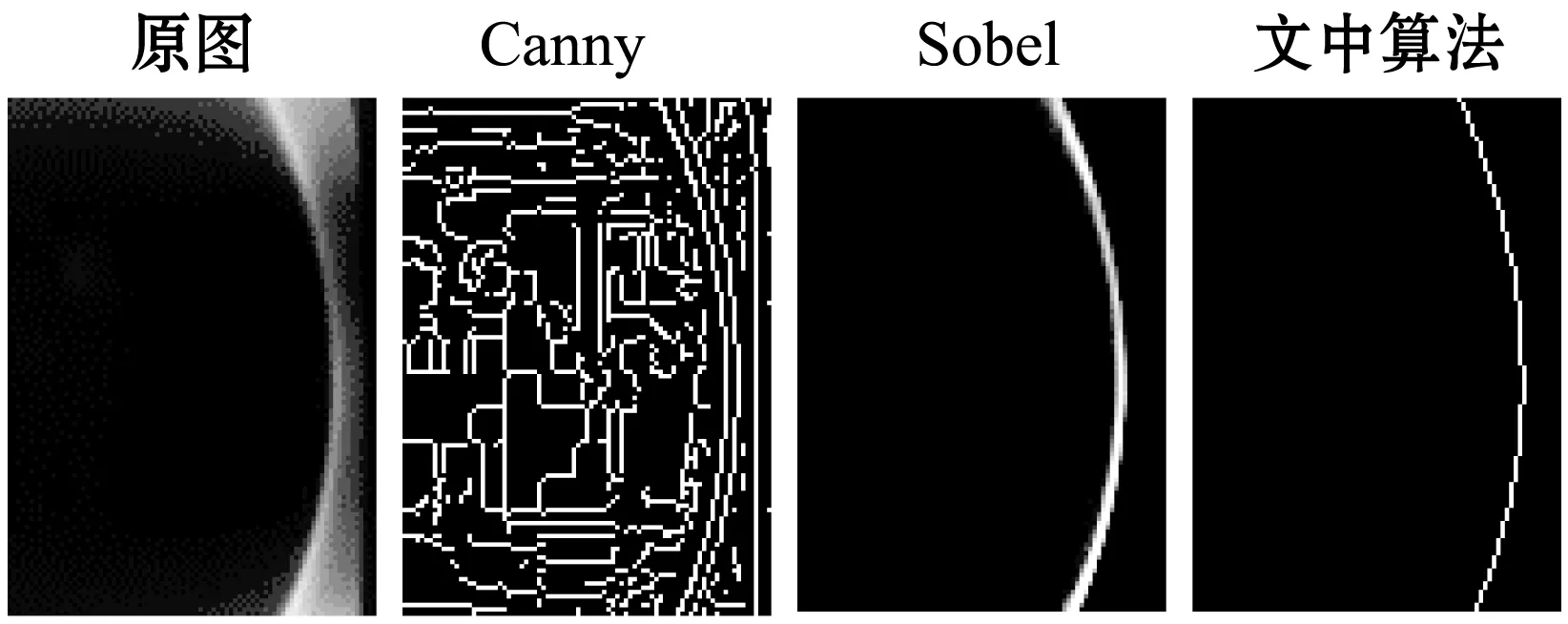
图3 原图与各算法处理结果图
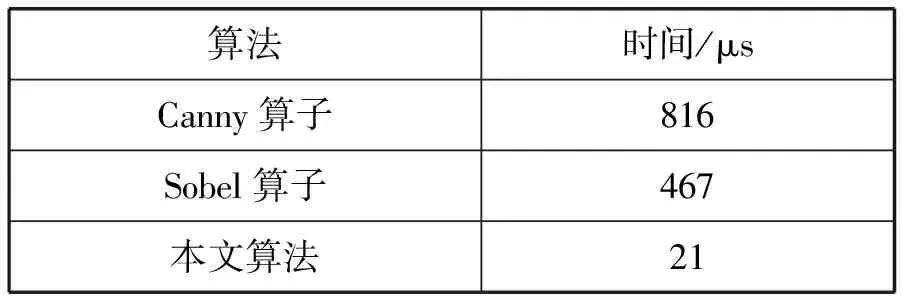
表1 不同算法用时
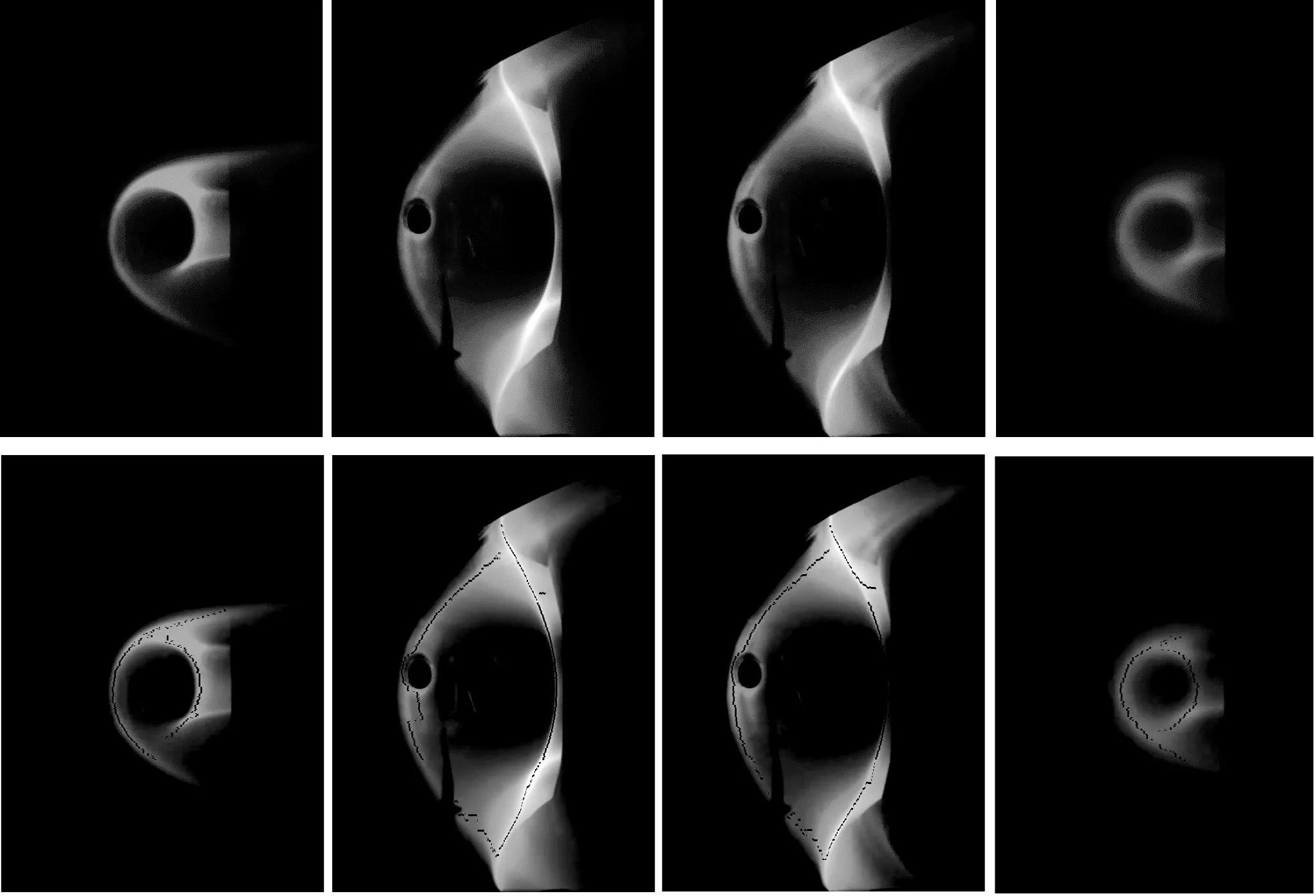
(a) (b) (c) (d)图4 新算法全图处理结果
选取的ROI区域的大小为85×120像素,并已经进行过灰度化处理。实验采用的计算机处理器为Intel(R) Core(TM) i3-540 CPU@ 3.06 GHz,内存6 GB,操作系统为Windows 7 64位专业版,编译环境为Visual Studio 2013,图像处理库为OpenCV 2.4.13。
实验中,OpenCV中的Canny算子滞后性阈值分别取3和9,计算梯度与方向的Sobel算子大小为3;Sobel算子只进行x方向的梯度计算,Sobel核的大小和Canny算法一致。
从处理的结果上看,Canny算子为了降低错误率,提高算法的定位性,处理过程中尽可能保留了梯度边缘,导致没有进行滤波的情况下得到了很多边缘。Sobel算子和本文提出的算法只提取出了比较明显的边缘,相对的,Sobel算子得到的结果显得更宽。在对应到等离子体边缘的空间位置时候,Sobel算子还需要进一步的处理,并且对图中的左上方出现的hot spot形成的亮斑不能很好地处理,边缘识别出来后也需要进行处理。从时间上来看,Canny算子和Sobel算子计算时间都在几百微秒,再考虑到图像采集、传输和预处理中花费的时间,使用Canny算子和Sobel算子这一类的梯度算子很难满足EAST装置控制系统的实时性要求。新算法将ROI区域的边缘识别时间降低到了21 μs,为实现系统的实时性提供了基础。
4 结 语
识别托卡马克装置放电过程中图像数据的等离子体边缘,并进行等离子体的位形控制是一种可以弥补利用磁测量数据进行等磁通控制不足之处的新颖思路。但是,在实现基于高速相机的图像数据进行反馈控制中,系统的实时性很难得到保证。本文提出的基于显著性的快速等离子体边缘提取算法可以快速地实现等离子体边缘提取,并且对噪声的敏感性也较弱。但是,算法没有考虑对一些在等离子体边界上出现的不稳定性如hot spot、MARFE的处理。这些现象会在边缘处呈现异常的亮点或者亮斑,会导致出现错误的边缘识别。在实际中,为了提高算法的鲁棒性,还需要进一步研究一些特殊情况下的边缘提取。
