农机自动导航驾驶系统在苏州市的试验研究及推广建议
2018-10-23黄裕飞张文斌程玉龙李志刚
黄裕飞 张文斌 程玉龙 李志刚
为高质量推进粮食生产全程机械化,促进农业装备智能化、精准化发展,充分发挥先进装备技术对农业现代化发展的支撑作用,苏州市农业机械技术推广站通过市场调研,对不同类型的农机自动导航驾驶系统进行比较,选型引入了拓普康System 150自动驾驶系统,主要应用于机插秧作业,旨在减轻劳动强度,降低劳动成本,提高机插作业质量,促进劳动生产率提高。
1 国内外技术研究现状
1.1 国外研究现状
目前,美国、俄罗斯、中国及欧盟国家都建有各自独立的卫星导航系统。其中美国的全球定位系统GPS在农业机械导航领域应用最为广泛。伊利诺斯大学的Benson等混合使用GDS(Geomagnetic direction sensor)和一个中等精度的GPS系统(20 cm),引导拖拉机沿着直线行驶,其平均误差小于1 cm。日本的Yoshisada、Nagasaka等为久保田SPU650型插秧机开发了自动导航系统。在该系统中,使用RTK GPS来提供插秧机的精确定位信息,并用光纤陀螺仪检测插秧机前进方向。水田实验表明,当插秧机以0.7 m/s的速度行驶时,与期望直线路径的均方根偏差为5.5 cm,最大偏差小于12 cm。荷兰的TijmenBakker等在甜菜地开展了农业机器人平台的自主导航研究,同样使用了RTK GPS进行导航,田地实验精度达到了厘米级。
1.2 国内研究现状
国内学者对农业机械GPS导航的研究起步相对较晚,在最近几年逐步发展起来。张智刚等在久保田插秧机上开发了基于DGPS和电子罗盘的导航控制系统,当速度为0.75 m/s直线路径跟踪时,平均误差0.04 m,最大误差0.13 m;当速度为0.33 m/s圆曲线路径跟踪时,平均误差0.04 m,最大误差0.09 m。罗锡文等在东方红X804拖拉机上构建了基于RTK DGPS的自动导航控制系统,在拖拉机行进速度为0.8 m/s时,直线跟踪的最大误差小于0.15 m,平均跟踪误差小于0.03 m。
农业机械的卫星导航系统技术总体而言已经基本成熟,随着卫星导航系统产品的普及,其使用成本也将不断下降。我国配有北斗导航系统的拖拉机已经进入一些大型农场的田间地头,可以减轻劳动强度、延长作业时间、改善作业质量。
2 试验研究
2.1 试验目的
通过试验研究,探索拓普康System150自动导航驾驶系统应用于相关农机作业的适用性、可靠性、经济性。
2.2 试验条件
试验前按要求对自动导航驾驶系统进行安装、调试。配套试验机具为久保田M954KQ拖拉机、久保田2ZGQ-6B插秧机、洋马2ZGQ-6D插秧机。
2.3 试验地点
试验地点分别选在太仓市、吴江区及相城区,依托金香溢农机服务专业合作社、同里镇北联农机服务专业合作社及东林农机服务专业合作社开展项目试验。这些合作社的农田具有不同的土壤类型、不同的耕整地农艺条件,在苏州市具有代表性。
2.4 试验方法
试验主要测定拖拉机机耕路、未旋耕田块直线度及插秧机作业邻接行宽绝对偏差两个指标。
(1)直线度测定。将拓普康System150自动导航驾驶系统安装在久保田M954KQ拖拉机上,在机耕路面、未旋耕田块两端通过控制器设定预定行走的AB直线路径,AB直线距离为100 m,地头与地尾10 m距离为非测量区,在一个作业长度内每间隔3米选取1个点,共选取20个点测定其绝对偏差,验证导航精准度。
(2)邻接行宽绝对偏差测定。将拓普康System150自动导航驾驶系统分别安装在久保田2ZGQ-6B插秧机和洋马2ZGQ-6D插秧机上开展邻接行宽试验。测量邻接两行之间的行宽,地头与地尾10 m距离为非测量区,在一个作业长度内每间隔2米选取1组邻接行对称点,共取20组,对称两点应保持在同一水平线上,测量每组对称点之间的距离,从而计算邻接行宽与设定行宽的绝对偏差。
3 性能测试结果与分析
3.1 直线度测定
在金香溢农机服务合作社附近的机耕路与未旋耕田块上进行不同速度下的直线度测定,测定数据见表1。
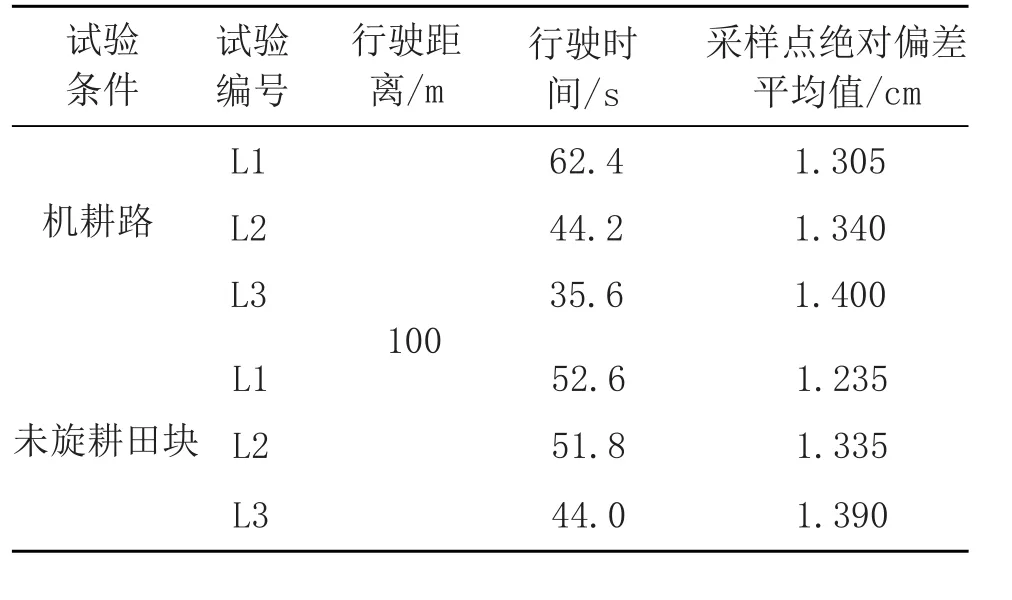
表1 不同速度下直线度测定
从直线度测定试验数据中发现,自动驾驶系统在拖拉机上的应用能符合自动导航RTK(±2.5 cm)指标要求,且数据显示拖拉机行驶速度越快,采样点绝对偏差平均值就越大。
3.2 邻接行宽绝对偏差测定
相城望亭、吴江同里、太仓东林试验田块的基本情况调查与测定结果见表2。相城望亭、吴江同里、太仓东林的机插秧作业邻接行宽测定数据见表3。
试验结果表明:深翻条件下自动导航邻接行宽绝对偏差平均值达到13.3 cm,适应性相对较差。主要原因为深翻后田块平整度不高,插秧机作业时容易陷进去,导致车体阻力增大,与标定状态发生偏差,参数无法及时纠偏,有时会触及系统安全保护设定条件,发生自动解除自动驾驶模式现象。旋耕条件下,自动导航邻接行宽绝对偏差平均值均小于5 cm,作业质量相对稳定,适应性较好。
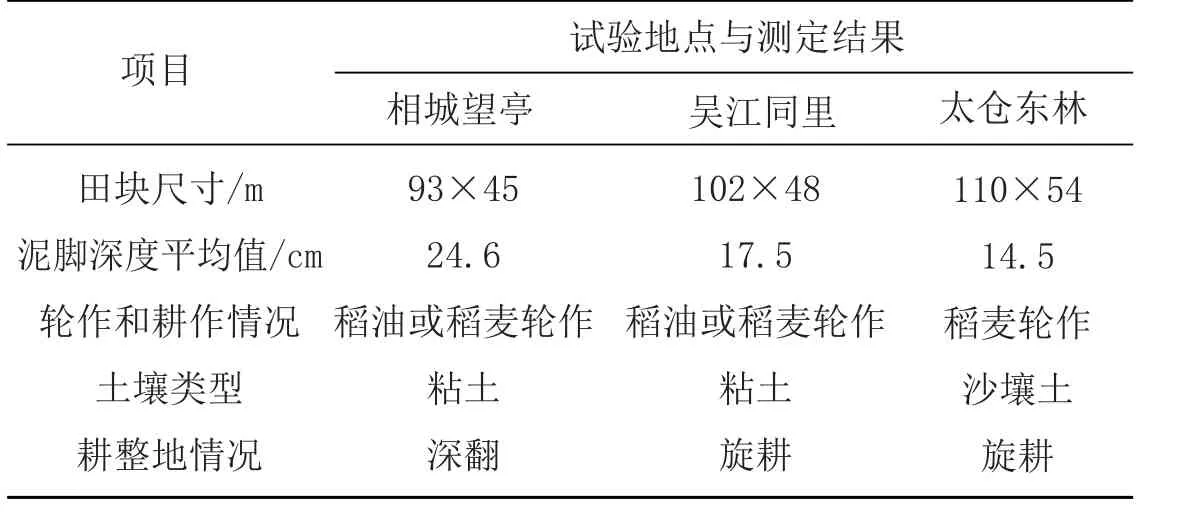
表2 试验田块基本情况调查与测定
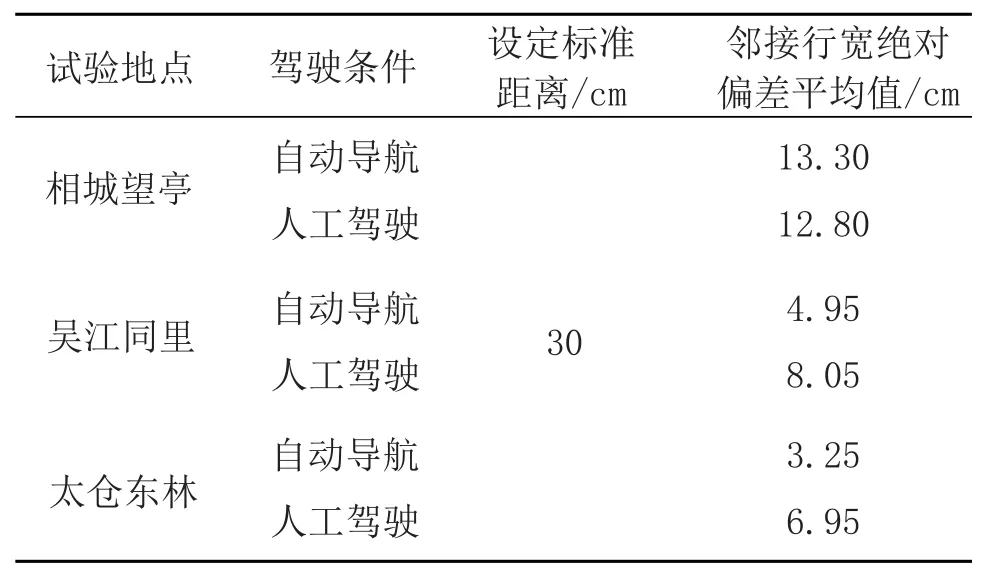
表3 邻接行宽绝对偏差测定
4 经济效益分析
项目主要围绕用工成本、作业效率开展经济效益分析。自动导航驾驶与人工驾驶的作业效率见表4。
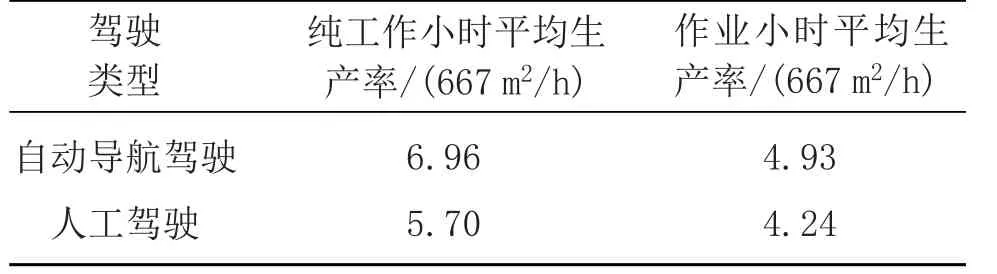
表4 自动导航驾驶与人工驾驶的作业效率
自动导航驾驶仅用1名驾驶员就可以完成加秧、插秧作业,而人工驾驶至少需要2人才能完成加秧、插秧作业。按一个作业季节20 d计算,自动导航驾驶比人工驾驶每季可节省人工成本8 000~12 000元(熟练机手人工费按500~600元/天计算,加秧手人工费按400~500元/天计算)。按每天工作12 h计算(早上6点下地,晚上7点结束,中午休息1 h),自动导航驾驶每台插秧机一个作业季可插秧78.88 hm2,人工驾驶一个作业季可插秧67.84 hm2,使用自动导航系统每台插秧机每季可多插11.04 hm2,作业效率提升约14%,节本增效明显。需说明的是人工驾驶的隐形成本未计算在内,如培养一名熟练的插秧机操作手的成本(文中的熟练机手指具有5~8年驾龄的机手)。自动导航驾驶的驾驶员只需了解插秧机操作规程,会田头转弯即可,作业过程中劳动强度不大。
5 推广建议
农机自动导航驾驶系统在东北、新疆等地域辽阔的地方已经有了一定的推广量,并基本实现了国产化。由于农业劳动力有效供给趋于紧张,自动导航驾驶系统在苏州市具有一定的推广价值。因此,针对农机自动导航驾驶系统在苏州市的试验应用效果,提出以下推广建议:
(1)由于单套导航设备价格目前仍较高,对于小规模种植的农民来说很难接受。建议国家科研机构对进口设备技术加快消化吸收,加快研制符合中国国情的拥有自主知识产权的北斗卫星自动导航驾驶系统,并提高其可靠性、稳定性。
(2)从苏州市使用情况来看,农机自动导航驾驶系统更适应较长的田块。建议相关部门结合农机发展前景,建设便于自动导航驾驶的高标准农田,同时,鼓励引导区域性土地适度规模经营。
(3)自动导航驾驶系统安装在插秧机上进行机插秧作业时,作业质量主要取决于田块的耕翻质量。建议自动导航驾驶插秧前,尽可能进行高质量的耕整地。

(4)拓普康自动导航驾驶系统非拖拉机、插秧机原装标配产品,改装换装相对复杂,需要专业技术人员安装,增加了使用难度。建议厂家提高设备安装简便性。另外,由于该系统是智能、先进的农机装备,需要操作使用者具备一定的知识水平,建议农机主管部门、推广机构、厂家及经销商对农民、机手开展自动导航驾驶安装、操作培训。
(5)农机自动导航驾驶系统使用时受环境的影响比较大,如在周围有林带、地势较低洼、附近有电力及具有强干扰信号的污染源的地方,会发生差分信号不稳定或信号中断问题,导致定位精度不准确。移动基站在使用方面会受到限制,建议在地块宽广地段建立固定基站,提高系统使用的便携性及稳定性。
(6)建议各级管理部门强化政策引导,充分利用国家农机购置补贴政策及省、市农机化专项资金,加大对精准农业技术的推广应用力度,提高补贴标准,鼓励、引导农机用户购买智能、先进、适用的农业机械,促进苏州市农机化高质量发展走在全省前列。