机载非正侧视阵雷达杂波分布特性研究
2018-10-23邓杏松
邓杏松,任 斌
(1.中国船舶重工集团公司第七二三研究所,江苏 扬州225101;2.北京航天长征飞行器研究所,北京100076)
0 引 言
空时自适应处理(STAP)技术是阵列自适应技术的推广和延伸,可实现对机载雷达强杂波的有效抑制,显著改善机载雷达对地面运动目标的检测性能。1973年,Brennan和Reed首次提出了空时二维自适应处理的概念,将阵列信号处理的基本原理推广到脉冲和阵元采样的二维数据立方中。经过四十多年的发展,STAP技术已经成功应用于美国新一代“先进鹰眼”E-2D预警机雷达中[1-3]。
STAP技术的基础是机载雷达杂波的建模,机载雷达通常处于下视工作,由于机载平台的运动,主杂波中心频率将产生多普勒频移,偏离杂波谱的中心,不再位于零频处,同时主瓣和旁瓣杂波的频谱将发生展宽。这种杂波相对于机载平台运动的特殊性,带来杂波的空时耦合。因此,机载雷达要实现强杂波背景中的低速目标探测,首先必须对杂波分布特性进行研究[4-6]。
然而,目前文献中关于机载杂波的研究大都是基于正侧视阵的,但在实际使用时,为了完成全空域的态势感知,机载雷达通常需要具备全方位多角度的扫描和对特定扇区目标连续跟踪的能力,这就需要机载平台安装多个覆盖不同空域的天线阵列,从而出现天线阵列轴线方向与载机飞行速度方向不在一条直线上,也即非正侧视阵的情况[7]。针对这一问题,本文开展了机载非正侧视阵雷达杂波分布特性研究。
1 机载非正侧视阵杂波建模
假设载机沿Y轴方向水平飞行,速度为V,如图1所示,天线阵面与载机飞行方向夹角为θp(θp=0°为正侧视),机载雷达波长为λ,若地面杂波散射点相对于天线的方位角和俯仰角分别为θa和φ,则该散射点的多普勒频率为:
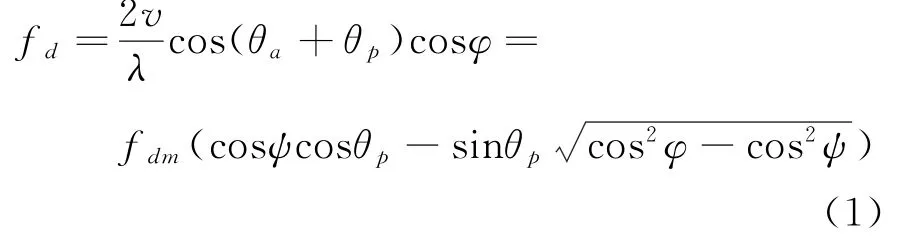
式中:fdm=2 V/λ,代表最大多普勒频率;ψ为相对于天线轴的锥角。
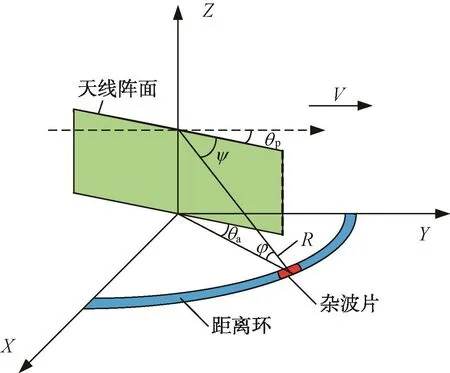
图1 机载非正侧视阵的几何关系
对式(1)移项可以得到:

对于θp不为零,当φ为常数时,式(4)为椭圆方程,此时为斜侧视阵的情况。
当θp取零时,机载雷达天线阵面平行于载机的飞行方向,此时为正侧视阵情形,式(5)变为:

根据上面的推导可知,机载雷达的杂波分布特性和天线阵面与载机飞行方向夹角θp关系密切。当θp为0°时,机载雷达处于正侧视阵列情况下,杂波二维功率谱在归一化多普勒频率和空域锥角余弦构成的坐标轴上呈现为一条固定斜率的直线分布;当θp的取值是0°到90°之间时,机载雷达就处于非正侧视阵列环境下,杂波谱在上述坐标轴上不再只是简单的线性函数关系,而是更加复杂的变化曲线,即呈现为一簇椭圆或者圆形分布。
2 机载非正侧视阵杂波的仿真
根据上一节建立的模型,对非正侧视阵雷达杂波进行仿真。当θp=0°、30°、60°和90°时,地杂波的分布如图2所示。
从图中可以看出,在由归一化多普勒频率和归一化空域锥角余弦构成的坐标平面内,正侧视阵雷达(θp=0°)的杂波呈现为高斯分布的切面分布,其投影为一条固定斜率的直线。当θp不为零时,杂波分布随θp的增大而增大,并逐渐发生偏转,从椭圆最终变成圆形。
由式(5)可以知道,杂波的分布除了与θp有关外,还与β和φ等变量相关。下面分别对这些变量的影响进行仿真。图3为在不同β下,当θp=0°、30°、60°和90°时,地杂波的二维分布曲线。
由图3可以看出,地杂波分布随β的变化而变化。对于正侧视阵,雷达杂波在β=2时,出现了多普勒模糊,即对同一空域锥角余弦,存在多个多普勒频率。对于非正侧视阵,对于同一个β,杂波分布随着θp的变化而发生偏转,并且偏转的程度随θp的增大而加剧。此外,随着β的增大,杂波分布区域变大,达到一定程度时会出现多普勒模糊。
图4为在不同φ下,当θp=0°、30°、60°和90°时,地杂波的二维分布曲线。
由图4可以看出,机载雷达地杂波的分布随φ的变化而变化,当φ由30°增大到50°时,对于同一θp,杂波分布的归一化多普勒频率和归一化的空域锥角余弦覆盖范围变小。
在进行杂波滤波时,杂波相关矩阵的大特征值数目决定了空时二维处理的运算量和运算速度。图5为不同β下的杂波特征值图。

图2 不同θp下的地杂波分布

图3 不同β下的地杂波分布

图4 不同φ下的地杂波分布
由图5可以看出,机载雷达杂波特征值随β的变化而变化,对于非正侧视阵雷达,当β由0.5增大到1时,特征值的数目由54逐渐增大到85,对于正侧视阵,特征值的数目和特征值的大小基本不变。当θp从30°增大到90°时,对于相同的β,其特征值的数目和特征值的大小基本不变。
图6为不同φ下的杂波特征值图。
由图6可以看出,机载雷达杂波特征值随φ的变化而变化,对于非正侧视阵雷达,当φ由30°增大到50°时,特征值的数目由80逐渐减小到62,对于正侧视阵,特征值的数目和特征值的基本不变。当θp从30°增大到90°时,对于相同的φ,其特征值的数目和特征值的大小基本不变。
图7为不同主副瓣比下的杂波特征值图。

图5 不同β下的杂波特征值

图6 不同φ下的杂波特征值图

图7 不同幅瓣电平下的杂波特征值图
由图7可以看出,机载雷达杂波特征值随主副瓣比的变化而变化,对于非正侧视阵雷达,当主副瓣比由-20 d B减小到-40 dB时,特征值的数目由90逐渐减小到85,对于正侧视阵,特征值的数目和特征值的大小基本不变。当θp从30°增大到90°时,对于相同的主副瓣比,其特征值的数目和特征值的大小基本不变。
3 结束语
本文针对机载雷达非正侧视下的杂波分布特性进行了研究。首先分析了非正侧视阵杂波分布的基本原理,然后对机载非正侧视阵杂波建立了模型,最后通过改变天线阵面与载机飞行方向夹角、杂波脊的斜率、俯仰角的数值,对机载雷达杂波分布和杂波特征值影响进行了仿真研究。本文的研究可以为机载非正侧视雷达的空时自适应处理设计提供一定的参考。