有源相控阵雷达阵面热变形预测建模理论
2018-10-22苗恩铭魏新园潘巧生
苗恩铭 魏新园 刘 辉 潘巧生
合肥工业大学仪器科学与光电工程学院,合肥,230009
0 引言
近年来,随着对雷达观测目标和功能等方面的需求不断提升,雷达技术得到了飞速发展[1-2]。其中有源相控阵雷达(active phased array radar,APAR)以其机动性高、自适应能力强、可靠性高、探测和跟踪能力强等优点日益得到广泛应用,尤其在军事领域[3-4]。有源相控阵天线阵面作为雷达的重要结构,受到自重、振动、冲击、太阳辐射和雷达自身器件热功耗等因素影响会产生结构变形[5],其中雷达内部器件热功耗和环境温度变化导致的阵面热变形对电性能的影响不可忽略,它可使得增益减小、波束指向角度产生误差等。实现对雷达阵面热变形的准确预测,是减小热变形对雷达电性能影响的前提。热变形量的大小和方向随温度的变化不断发生改变,属于动态误差源,热变形量的测量和热变形规律的获取较为复杂。
国内外学者对雷达结构的变形进行了研究。WANG[6]研究了结构变形导致的阵元位置误差对相控阵天线电性能的影响,并指出大型天线可通过适当相位调整来提高性能,但并未针对热变形进行分析。PING[7]、叶菁[8]对雷达热设计进行了热控制研究,并未对雷达阵面的热变形进行研究。WANG等[9]采用软件仿真的方法建立了结构-电磁-热耦合模型,以减小由热功耗和外部负载造成的天线结构变形对相控阵雷达电磁性能的影响。软件仿真中依据的传统热变形计算理论与实际雷达热结构的热变形非相似性规律(即热变形后形体不再保持原有形状特征,会呈现出非相似性特征)具有一定差异[10],这导致软件仿真得到的热变形量与实际情况存在很大偏差。
本文对有源相控阵雷达热变形进行研究,通过实验实际测量出雷达阵面热变形量,基于模糊聚类结合灰色关联度算法,优选出温度测点,从而建立预测精度高且稳健性好的热变形预测模型;并根据预测结果对雷达电性能进行补偿,以验证模型对雷达电性能补偿的实际效果。
1 雷达阵面热变形实验
本文依据有源相控阵雷达阵面受自身T/R组件热功耗影响的原理,自行设计了一套雷达模型,测量其在受内部热源影响时阵面在X、Y和Z 3个方向的热变形量,用以研究雷达阵面受内部热源影响时,各方向热变形量的变化规律。
1.1 实验装置
自行设计的雷达模型包括雷达模块、加热器、立柱和支撑架4个部分,其装配图见图1,其中矩形框架为雷达模块,尺寸为400 mm×360 mm,材料为45钢,用以模拟雷达阵面。雷达模块下安装有加热器,用以模拟相控阵雷达T/R组件作为内部热源。雷达模块上安装有矩形长方体立柱即为测量标准件,共55根,用以模拟雷达天线作为测量雷达模型热变形量的直接测量对象。
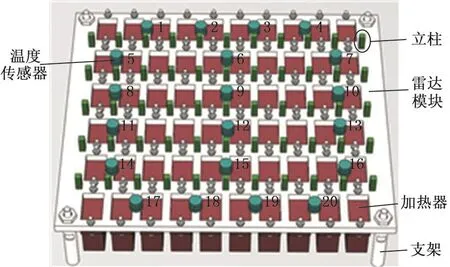
图1 雷达模型装配图及温度传感器分布Fig.1 Assembly diagram of radar model and distribution of temperature sensor
实验测量系统包括温度测量系统和坐标测量系统,分别用于测量阵面温度变化和各方向热变形量。使用20个DS18B20温度传感器,测量精度为0.5℃,分布情况见图1,其中圆柱体为温度传感器贴放位置(传感器导线未画出),各传感器的编号已在图中标出。坐标测量系统包括上位机程序、坐标采集卡和数控机床在线检测系统。在线检测系统使机床具有三坐标测量机的功能,测量精度为1 μm。
1.2 实验方案
雷达在实际工作时,不同T/R组件的工作状态会不断改变,其热功耗也会相应变化,导致雷达内部热源不均匀分布且动态变化,因此需要研究雷达模型在不同位置的温度变化对阵面热变形的影响。
本文通过控制不同加热器的开启与关闭来模拟实际雷达内部热源的变化。雷达模型实物图见图2,其中加热器沿X轴方向为一行,各行编号已在图中标注。每一行加热器同时由同一控制电路控制,因此本文通过控制电路改变6行加热器的工作状态来模拟雷达实际工作中不同内部热源的发热。
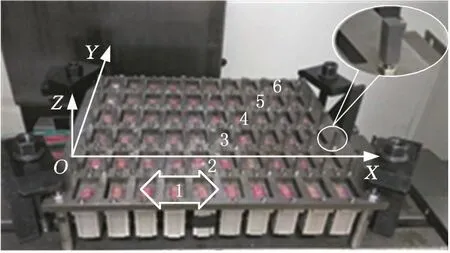
图2 雷达模型实物图Fig.2 Physical map of radar model
为了以较少的实验次数实现研究目的,本文采用田口实验法设计实验。实验安排情况见表1,共E1~E8组实验。
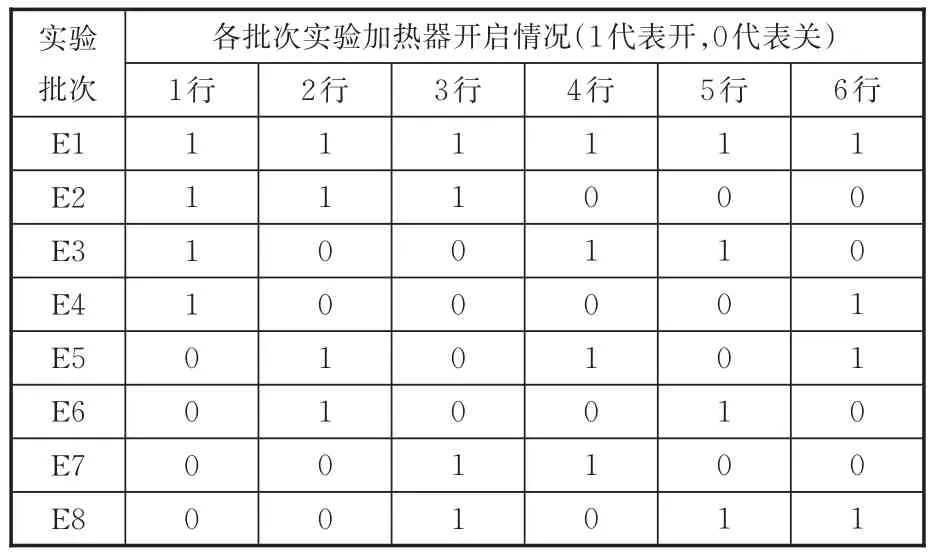
表1 实验安排情况Tab.1 Experimental arrangement
每批次实验中,对于开启的各行加热器,可通过依次调节加热电压至“5 V”、“11 V”和“20 V”三档来升高加热温度(初始电压为0,初始温度为室温),并对雷达模型进行加热。每增大一次加热电压,持续加热1.5 h,待雷达模型温度场稳定后,测量一次坐标值和温度值。
1.3 实验结果
限于篇幅,仅列出E1批次的实验结果,包括温度测量数据和热变形量数据。根据20个温度传感器的测量值和对应位置坐标,绘制出该批次实验的温度场分布曲面图(图3),且坐标系原点与图2中一致,图中的29.66℃为初始环境温度。
根据55根立柱的Z向热变形量测量数据和对应立柱的位置坐标,绘制出该批次实验中雷达模型阵面的Z向热变形曲面图(图4),且采用与图2相同的坐标系,不同加热电压下的热变形曲面用不同颜色绘制。
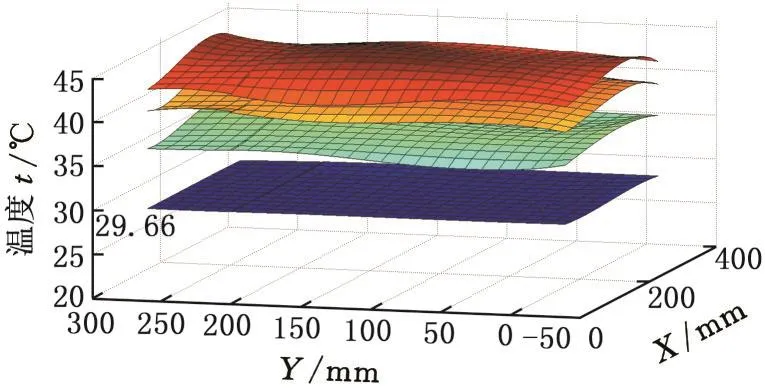
图3 E1实验温度场测量结果Fig.3 Measurement results of temperature in E1 experiment
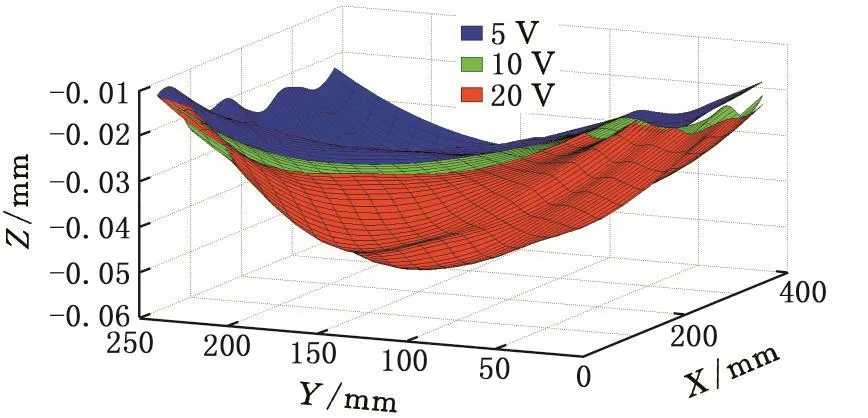
图4 E1实验Z向热变形测量结果Fig.4 Measurement results of thermal deformation in Z direction in E1 experiment
由图4可以看出,当雷达阵面温度升高时,热变形并非按比例向外膨胀,而是呈向下凹陷的趋势,这与传统热变形理论不相符,由此证明了有源相控阵雷达阵面热变形的非相似性。所以通过软件仿真得到的热变形量并不准确,从而证明了需通过实际测量来研究雷达阵面热变形规律的必要性。
2 雷达阵面热变形建模
2.1 阵面热变形建模理论分析
机械零件在工作温度改变后会产生变形,即热变形,通常热变形量依据传统热变形理论公式ΔL=αLΔT计算得到,其中ΔL为热变形量,α为热膨胀系数,L为初始长度,ΔT为温度变化量。但实际上由于温度场分布的不均匀性、构件材料的原子间距、内部缺陷形态等因素的影响,零件的热膨胀不能自由发生,导致零件热变形前后在形状上具有非相似性[10]。若仍根据传统的热变形理论计算热变形量,会与实际情况存在偏差。有源相控阵雷达阵面的热变形即具有这种非相似性,因此本文通过实验研究,建立了热变形和阵面温度之间的数学模型,其模型表达式如下:

式中,Δxm,n、Δym,n、Δzm,n分别为有源相控阵雷达阵面各天线X、Y、Z 3个方向的热变形量;m、n分别为天线的行数和列数;ΔTi、ΔTj、ΔTk分别为雷达各位置处的温度变化量;fXm,n、fYm,n、fZm,n分别为3个方向的热变形与阵面温度之间的函数关系。
本文采用较为常用的多元线性回归算法[11-12]建立模型,输入量为温度传感器变量,输出量即为雷达阵面热变形量。若21个温度传感器变量(包括20个阵面温度传感器和1个环境温度传感器)全部用于建模,则模型的复杂程度会大大增加,同时各温度传感器之间的共线性也会对模型的预测效果产生较大影响[13-14],因此在建模之前,需要对温度传感器变量进行筛选,以优化用于建模的温度测点个数。
本文采用模糊聚类结合灰色关联度算法[15]对雷达阵面的的温度测点进行优化,以提高模型的预测精度和稳健性。模糊聚类算法基于温度测点之间的模糊相似关系对温度测点进行分类,进而从各类中采用灰色关联度法,优选出与热变形关联性最大的温度传感器变量参与建模。
2.2 阵面热变形建模结果
依据上述建模理论,可分别建立雷达阵面X、Y和Z 3个方向热变形量关于温度传感器变量的多元线性回归模型。实验研究表明,温度传感器变量的个数为2时,模型的预测效果最好,因此本文优选出2个温度测点,建立最高次为2的回归模型。模型表达式如下:

式中AX、BX、CX、DX、EX、FX均为模型系数;ΔTa、ΔTb为优选出的2个温度传感器变量。
式(2)中仅列出X向模型表达式,Y向和Z向类似,不再列出。
利用E1~E8批次数据,分别对雷达阵面测得的55根立柱X、Y、Z 3个方向的热变形量优选温度测点,并建立热变形量和温度测点回归模型。其中优选温度测点是从21个温度变量中筛选的。
建模结果见表2,即式(2)中各项模型系数。表2中温度测点优选结果列出了温度传感器的编号,编号对应位置见图1,其中21号为环境温度传感器。限于篇幅,本文仅列出了Z向热变形量的建模结果。
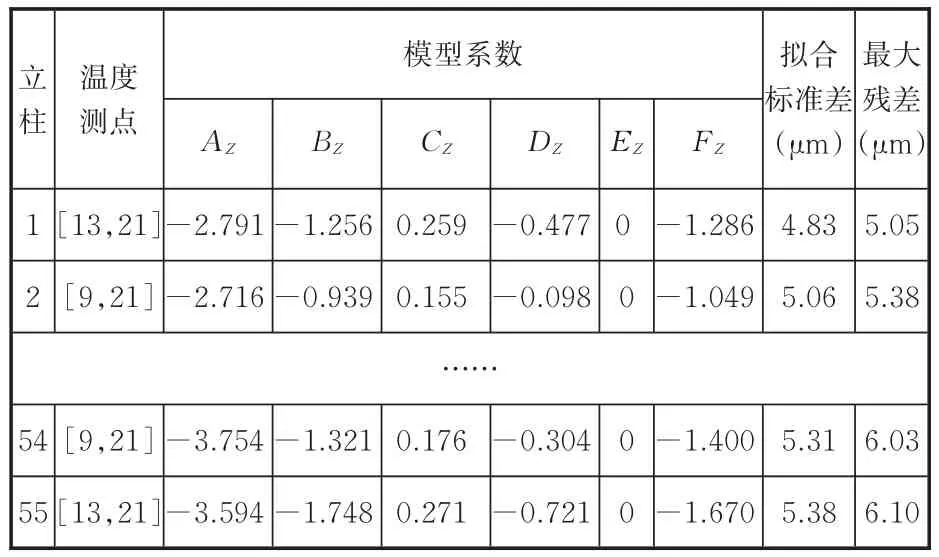
表2 阵面Z向热变形量建模结果Tab.2 Modeling results of Z direction thermal deformation
3 雷达热变形预测效果及电性能补偿
为了验证所建立模型的预测效果,本文随机选取6种加热器开启方式,仿照E1~E8批次实验流程进行了6批次验证实验,记为F1~F6实验。使用表2中所建立的各热变形模型,对F1~F6批次实验数据进行预测,预测结果见表3。
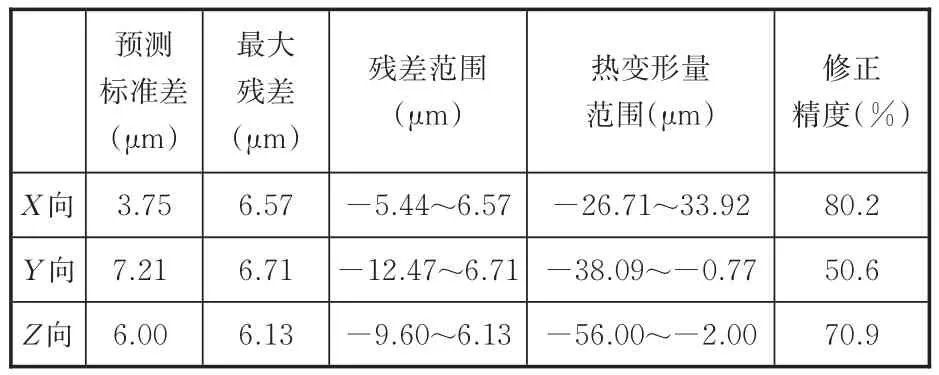
表3 热变形量模型预测结果Tab.3 Prediction results of thermal deformation models
由表3可知,本文所建模型对雷达阵面X向热变形量的修正精度达到80.2%;对Y向热变形量的修正精度达到50.6%;对Z向热变形量的修正精度达到70.9%。
根据对F1~F6批次实验的热变形预测结果,通过软件基于相位调整法的电性能补偿方法[16],对雷达电性能进行补偿。为了直观地表现出补偿效果,将补偿前和补偿后的最大方向增益变化误差和指向角度变化误差分别绘制成图5和图6,其中18个数据点依次为F1~F6批次实验的5 V、11 V和20 V 3个数据点。
由图5和图6可以看出,根据本文所建模型的热变形预测结果对雷达电性能进行补偿后,雷达最大方向增益变化误差和指向角度变化误差均明显减小。根据计算结果,最大方向增益变化误差和指向角度变化误差分别平均减小89.5%和58.7%。表明本文所提有源相控阵雷达雷达热变形预测建模理论可准确预测出阵面的热变形量,从而为雷达电性能补偿提供可靠依据。
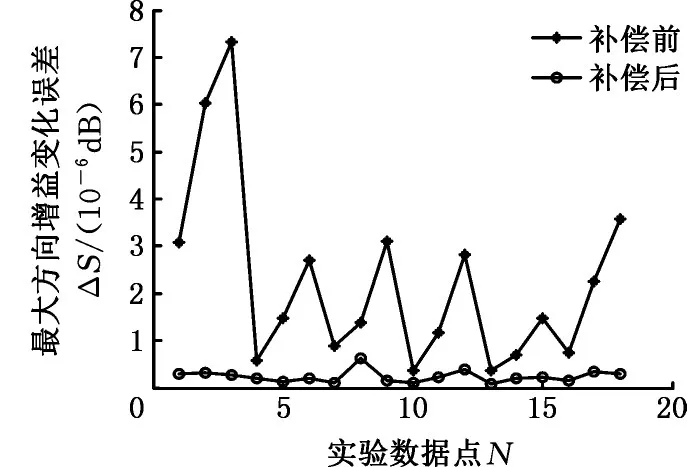
图5 最大方向增益变化误差补偿效果比对Fig.5 Comparison of maximum direction gain error compensation effect
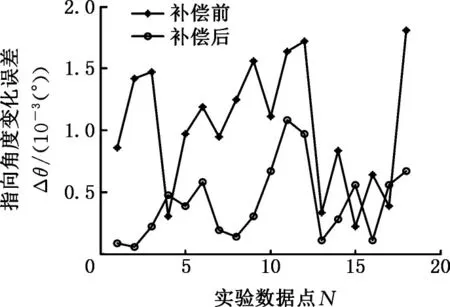
图6 指向角度变化误差补偿效果比对Fig.6 Comparison of angle variation error compensation effect
4 结论
(1)本文基于非相似性热变形理论,通过实验研究建立有源相控制雷达阵面热变形量预测模型。建模前使用模糊聚类结合灰色关联算法优化温度测点个数,以得到高预测精度和高稳健性的模型。并使用所建模型对6批次不同实验数据进行预测,X、Y和Z 3个方向热变形的修正精度分别达到了80.2%、50.6%和70.9%,模型重复性较好。
(2)依据预测结果对雷达电性能进行补偿。结果表明,补偿后最大方向增益变化误差和指向角度变化误差分别平均减小89.5%和58.7%。所以本文所提有源相控阵雷达热变形预测建模理论可有效用于雷达电性能补偿中的热变形量预测。
(3)本文在雷达阵面热变形预测建模理论的研究中仍存在较大的提升空间,尤其是用于建模的温度测点优化理论研究。保持一定的预测精度的同时应进一步减少温度传感器变量参与建模的数量以降低预测成本。该方向的研究具有重要的理论研究和工程应用价值。
