基于多体动力学的汽车操纵稳定性试验研究
2018-10-21杨俊华
杨俊华
摘 要:汽车的操纵稳定性是保持汽车稳定行驶的重要特性,关系到车辆、驾乘人员以及行人的安全。文章以基于多体动力学的汽车操纵稳定性试验作为主要研究课题,选取某车对其操纵稳定性进行仿真试验,得出该车具有较好的操纵稳定性能的结论,希望文章研究可以为汽车的开发设计起到一定的指导作用。
关键词:多体动力学;汽车;操纵稳定性;仿真
中图分类号:U461.6 文献标识码:B 文章编号:1671-7988(2018)17-41-06
Abstract: The steering stability of a car is an important feature that keeps the car moving steadily. It concerns the safety of vehicles, occupants and pedestrians. In this paper, based on the multi-body dynamics of the vehicle handling stability test as the main research topic, select a car to simulate its handling stability and draw the conclusion that the car has good handling and stability, I hope this study can be for the car The development and design play a guiding role.
Keywords: multi-body dynamics; automobile; handling stability; simulation
CLC NO.: U461.6 Document Code: B Article ID: 1671-7988(2018)17-41-06
引言
所谓汽车操纵稳定性能,指的是汽车能根据驾驶员的控制能力进行行驶,且能够抵抗外界干扰保持稳定行驶的性能。操纵稳定性决定着车辆在行驶过程中是否安全,且已作为关键技术指标用来对汽车性能进行评价。多体动力学为一种复杂机械系统,是由多个物体通过运动副连接而成。随着计算机技术的不断发展与进步,计算机仿真技术广泛应用于汽车工业中。尤其是多体动力学理论的发展,让多体动力学理论广泛应用于汽车操纵稳定性研究和设计领域中。本文则基于此,以多体动力学为理论,对汽车操纵稳定性进行了试验与仿真分析。通过仿真分析得知,该车操纵稳定性能较好。
1 方向盘角阶跃输入试验
1.1 仿真标准与方法
根据GB/T 6323-2014标准,该车在仿真车速为90kmh的情况下,进行整车动力学模型的满载试验,方向盘的角阶跃表现为0.1秒的时间内起跃9.2°,使得汽车稳态侧向加速度的数值增长为0.2g。
1.2 仿真数据处理及试验结果
对于方向盘角阶跃的输入试验,其主要涉及到以下几个变量。见图1-图6。
横摆角速度峰值时间能够由图3得知。
横摆角速度超调量根据式(1)明确:
在此之中,“汽车因素”TB主要由横摆角速度峰值响应时间和汽车质心稳态侧偏角相乘得来。
基于以上计算,得到表1所示的相关数据结果。
1.3 仿真结果评价
根据GB/T 6323-2014标准,汽车横摆角速度响应时间的评分见式(4):
2 方向盘角脉冲输入试验
2.1 仿真标准与方法
根据GB/T 6323-2014标准,该车在仿真车速为90kmh的情况下,进行整车动力学模型的满载试验,其中,方向盘转角输入脉宽表现为0.4s,在2s时,方向盘转动88°,使之最高侧向加速度增长到0.4g,同时,仿真时间表现为10s。
2.2 仿真数据处理及试验结果
对于方向盘角脉冲输入试验,其主要涉及到以下几个变量。见图7-图10。
根据试验所得到的结果,取其均值,可得出汽车的幅频及相频特性图,见图11、图12,其中,横坐标的最大值表现为3Hz。
根据GB/T13047-1991分别计算出谐振频率fP平均值,谐振峰水平D与相位滞后角α。数据结果见表2。
2.3 仿真结果评价
根据GB/T 6323-2014标准,对转向瞬态响应试验及方向盘角脉冲输入试验进行评分。
对于本车,f、D及α的上限值f100、D100、α100分别选择1.00、2.00、40.0,其下限值f60、D60、α60则分别选择0.60、5.00、80.0。
谐振频率f的评价分值,根据式(6)明确:
NM表示的是方向盘角脉冲输入试验的综合评分。
根据以上参数和公式,可以得到Nf=100,ND=97.24,Nα=100。最终得出NM=99.08。
3 转向回正性能试验
3.1 仿真标准与方法
根据GB/T 6323-2014标准,于低速情况下对车采取转向回正试验。以半径为15m为基础,让汽车以圆周行驶,将侧向加速度提升至4m/s2,而后维持均匀车速,3s后突然松开方向盘,对其运动不低于4s的过程做记录,运用公式 對其仿真时的车速计算出为27.8Km/h,该试验侧重对横摆角速度与时间变化关系的研究。
3.2 仿真数据处理及试验结果
对该车参照上述试验方法来作仿真试验,于横摆角速度与时间历程曲线上,定义t=10s时为坐标原点,评价指标如下:
1)稳定时间—时间坐标原点到处于新稳态值时横摆角速度的时间间隔;
2)残留横摆角速度—放开转向盘3s时的横摆角速度值(包含有零值);
3)横摆角速度超调量—第一个横摆角速度峰值超出新稳态值的部分与新稳态值之间的比值;
4)横摆角速度总方差值。
表3和图13为转向回正仿真试验结果。
3.3 仿真结果评价
由上述公式算出低速转向回正仿真试验的评价计分值,NH=83。见下表4。
根据表4计分值可见,低速转向回正下橫摆角速度总方差计分较小,应加大初始横摆角速度值,整体上的低速回正性能较好。
4 转向轻便性试验
4.1 仿真标准与方法
根据GB/T 6323-2014标准,转向轻便性实验是让汽车按照双扭线进行等向行驶,并对转向盘力矩等值做相关记录。该试验往往用于转向盘力输入特性的评价,尤其是转向轻便性的评价。
双扭线的极坐标方程见式(13):
5 稳态回转试验
5.1 仿真标准与方法
根据GB/T 6323-2014标准,仿真中汽车以最低匀速按照初始半径为20m进行圆周运动,转向盘转角为303.8度。然后加速(加速度为200mm/s2)并稳定转向盘转角。本试验为左转转向盘组,仿真分析结果见图18-图21:
5.2 仿真数据处理及试验结果
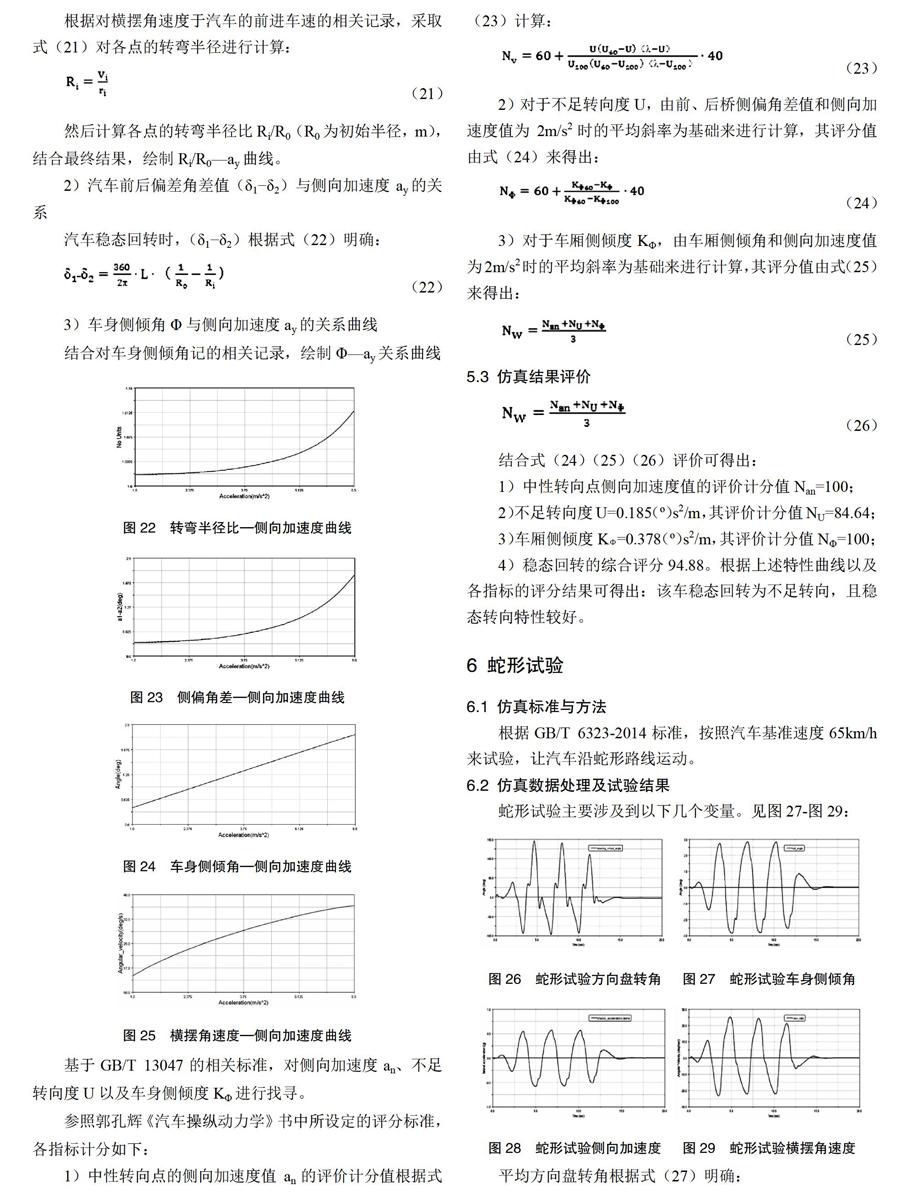
1)转弯半径比Ri/R0与侧向加速度ay关系
根据对横摆角速度于汽车的前进车速的相关记录,采取式(21)对各点的转弯半径进行计算:
然后计算各点的转弯半径比Ri/R0(R0为初始半径,m),结合最终结果,绘制Ri/R0—ay曲线。
2)汽车前后偏差角差值(δ1?δ2)与侧向加速度ay的关系
汽车稳态回转时,(δ1?δ2)根据式(22)明确:
3)车身侧倾角Φ与侧向加速度ay的关系曲线
结合对车身侧倾角记的相关记录,绘制Φ—ay关系曲线
基于GB/T 13047的相关标准,对侧向加速度an、不足转向度U以及车身侧倾度KΦ进行找寻。
参照郭孔辉《汽车操纵动力学》书中所设定的评分标准,各指标计分如下:
1)中性转向点的侧向加速度值an的评价计分值根据式(23)计算:
2)对于不足转向度U,由前、后桥侧偏角差值和侧向加速度值为2m/s2时的平均斜率为基础来进行计算,其评分值由式(24)来得出:
3)对于车厢侧倾度KΦ,由车厢侧倾角和侧向加速度值为2m/s2时的平均斜率为基础来进行计算,其评分值由式(25)来得出:
结合式(24)(25)(26)评价可得出:
1)中性转向点侧向加速度值的评价计分值Nan=100;
2)不足转向度U=0.185(?)s2/m,其评价计分值NU=84.64;
3)车厢侧倾度KΦ=0.378(?)s2/m,其评价计分值NΦ=100;
4)稳态回转的综合评分94.88。根据上述特性曲线以及各指标的评分结果可得出:该车稳态回转为不足转向,且稳态转向特性较好。
6 蛇形试验
6.1 仿真标准与方法
根据GB/T 6323-2014标准,按照汽车基准速度65km/h来试验,让汽车沿蛇形路线运动。
6.2 仿真数据处理及试验结果
将以上各操纵稳定性试验所得到的评分值代入式中,可以得到该车操纵稳定性的综合分数,即为NZ=89.06,说明整车操纵稳定性较好。
8 结论
本文以多体动力学为基础,对某车操纵稳定性进行了仿真试验,最终得出此车的操纵稳定性总评价为89.06分,说明该车操纵稳定性良好。本文研究可以为汽车设计起到一定的指导作用,降低汽车设计的成本。但由于笔者自身能力的不足,加之相关资料的缺失,本文研究还不够深入详细,在后期还有待进一步完善。
参考文献
[1] 王鑫,赵强,何法,等.线性二自由度汽车操纵稳定性仿真分析[J]. 森林工程,2016,32(1):64-67.
[2] 潘公宇,张明梅.高速转向工况下汽车操纵稳定性和平顺性研究[J]. 广西大学学报(自然科学版), 2016, 41(3):674-683.
[3] 余卓平,肖振宇,冷搏,等.分布式驱动电动汽车操纵稳定性控制评价体系[J].华东交通大学学报, 2016, 33(5):25-32.
[4] 魏道高,李莉莉,王鹏,等.考虑悬架影响的汽车操纵稳定性闭环系统Hopf分岔特性[J].汽车工程, 2016, 38(2):141-148.
[5] 赵旗,王维,罗兰,等.基于UniTire侧向力模型的汽车操纵稳定性的建模和仿真[J].科学技术与工程, 2016, 16(32):127-131.
[6] 田原嫄,任利亚,李伟.刚柔耦合独立悬架对汽车操纵稳定性的影响[J].拖拉机与农用运输车, 2016(2):16-18.
[7] 潘佳炜,袁世海,谢伟忠.拟合次数对汽车操纵稳定性客观评价指标的影响[J].汽车技术,2016(2):29-32.
[8] 高小清,程军.汽车操纵稳定性评价方法研究[J].汽车技术, 2017 (3):8-11.
