铁氧体伺服电机转子初始位置估计研究
2018-10-20李新华陈加伟徐亚文朱厚钰王晓光
李新华,陈加伟,徐亚文,朱厚钰,王晓光
(湖北工业大学,武汉 430068)
0 引 言
铁氧体永磁辅助式磁阻同步伺服电机(以下简称铁氧体伺服电机)使用铁氧体永磁材料制成主磁极,永磁材料成本低,较好地解决了目前钕铁硼永磁同步伺服电机成本不断上升的问题,且高温性能稳定,恒功率调速范围宽,不存在过压风险,在伺服驱动系统中有着良好的应用前景[1-4]。
永磁同步电机通常使用磁定位方法来对电机的转子初始位置进行预定位,预定位完成后,可近似将电机的d轴与A相重合的位置视为电机的零度位置。这种方法实现起来简单可靠,在工程中应用广泛[5-6],但是由于铁氧体伺服电机一个对极的转矩周期内可能有两个极值[7-8],若仍采用磁定位方法预定位,则存在两个零度位置。即使通过零度位置辨识和补偿的方法实现了电机的正常起动,但是辨识和补偿过程中的误差也会对伺服系统性能带来不利影响。对于要求较高的伺服系统,此方法不再适用。
针对铁氧体伺服电机的静态转矩特性,本文提出一种基于双坐标参考系铁氧体伺服电机转子位置的估算方法。该方法是在电机控制参考坐标系中施加2个不同的参考转矩指令,通过位置传感器计算转子最大移动距离,利用反三角函数和割线法估计电机初始磁极位置。这种方法能有效避免电机参数变化对位置估计的影响,且易于实现。样机仿真和现场实验结果表明,本文的基于双坐标参考系铁氧体伺服电机转子位置估算算法能够快速收敛至估计值,估计误差小,简单易行。
1 双坐标参考系原理
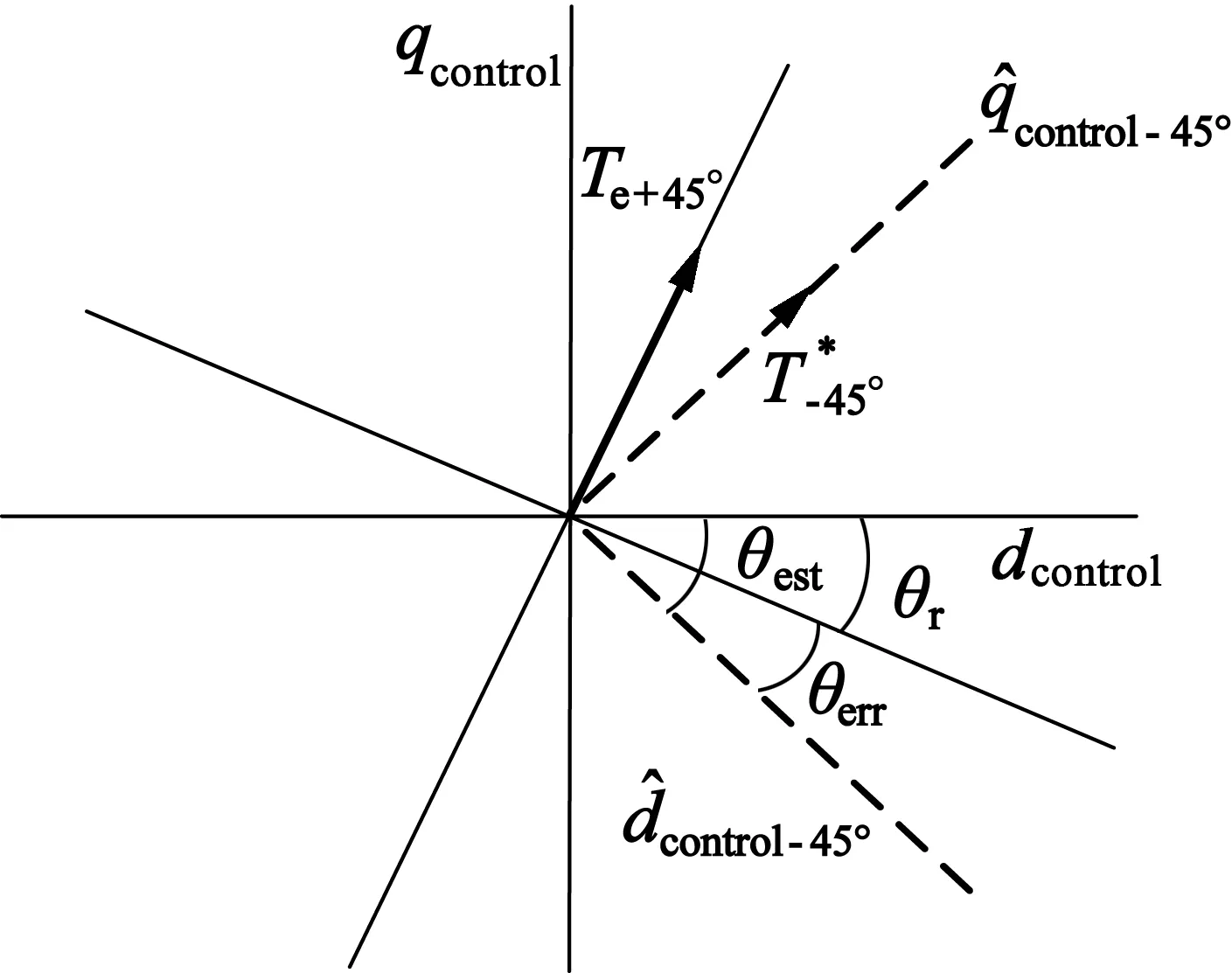
如图1所示dreal,qreal为电机实际参考系,dcontrol,qcontrol为电机控制系统参考系,dreal,qreal和dcontrol,qcontrol称之为双坐标参考系。dreal轴轴线置于铁氧体伺服电机转子磁极位置(即转子初始位置),参考转矩指令分别加在控制参考系dcontrol和qcontrol。由图1可知,如果能估算出两坐标系对应轴线的误差角θerr,就可以知道电机磁极的初始位置。

图1 双坐标参考系

利用正余旋定理计算铁氧体伺服电机的实际转矩Te+45°:

(1)

(2)
反馈到电流控制器的位置角:
θref=θfb+θcmp+θshift
(3)
式中:θfb为增量式编码器反馈的相对位置角;θshift为转矩指令(+45°或-45°)的施加角;θcmp为磁极初始位置误差补偿角。

(a) qcontrol轴移动+45°
(b) qcontrol轴移动-45°
当Te+45°=Te-45°时,有:
(4)
于是误差角θerr:
(5)
(6)
式中:J为转动惯量;F为摩擦系数。

(7)
对式(7)进行拉普拉斯变换,同时初始位置条件θ(0)= 0,θ′(0)=0,有:
Te(s)-TL(s)=θ(s)(Js2+Bs)
(8)
式中:s为拉普拉斯算子。
故可求出θ(s):
(9)
将式(1)和式(2)分别代入式(9),有:
(10)

(11)
为了便于计算,假设在位移中负载是恒定不变的,可以忽略,得:
(12)
(13)
上式表明,可从q轴控制轴测试转矩指令Te+45°,Te-45°计算出误差角。因此,必须选择合适的转矩指令信号才能准确估计θerr。
2 参考转矩指令选择与象限判断
2.1 参考转矩指令选择
选择合适的转矩指令用于估计转子初始位置十分重要。若施加转矩指令时导致转子出现较大的位移,就会产生估计误差。电机转子在转矩指令作用下产生的位移和速度会因转子初始位置不同而不同,如图3所示。图3的参考转矩指令包括暂停段、正转矩段和负转矩段,其中,正、负转矩都有加速、恒速和减速部分。如果参考转矩使正、负转矩抵消,电机转子就不会有角位移。

图3 不同参考转矩指令转子位移和速度
2.2 象限判断
位置估计时首先要判断转子磁极所在的象限。根据矢量控制方法,2个电流指令作用在电机的qcontrol轴+45°和qcontrol轴-45°方向上,在间隔很短的时间内持续给出幅值较小的电流指令,从而确定电机转子的旋转方向和θinitial,将θinitial代入式(14)中就可计算出电机近似的初始位置角。
θref=θfb+θcmp+θshift+θinitial
(14)
施加不同电流指令,表1给出了电机转子初始位置象限判断规则。

表1 电机转子初始位置象限判断规则
可见,当2个电流指令作用下的旋转方向都是反转,则电机转子处于参考坐标系的第Ⅰ象限,此时θinitial=0°;当-45°电流指令作用下的旋转方向是正转、+45°电流指令作用下反转,则转子处在第Ⅱ象限,θinitial=90°;当2个电流指令作用下的旋转方向都是正转,则转子处在第Ⅲ象限,θinitial=180°;当-45°电流指令作用下的旋转方向是反转、+45°电流指令作用下正转,则转子处在第Ⅳ象限,θinitial=270°。
3 初始位置精确估计
为了得到θerr值,使用正割线的连续根来近似等效函数的根,割线法公式:
(15)
连续估计θerr值直到收敛,每次估计时可更新θerr,更新算法:
(16)
根据象限判断的结果可以确定迭代的初始值,磁极初始位置补偿角:
θcmp(n)=θcmp(n-1)+θerr(n)
(17)
最终初始位置估计角:
θest=θcmp+θinitial
(18)
图4是铁氧体伺服电机初始位置估计控制框图,用初始位置的象限判断模块和初始位置估计模块来修正矢量控制的反馈角度。图5是初始位置估计模块框图。

图4 铁氧体伺服电机初始位置估计控制框图

图5 初始位置估计模块框图
4 仿真与实验验证
为了验证双参考坐标系铁氧体伺服电机初始位置估计方法的有效性,试制了一台1.5 kW铁氧体伺服电机作为样机,并构建如图6所示的实验平台。
场路联合仿真是在Maxwell中修改电机的初始位置Simplorer提供硬件电路,通过MATLAB施加参考转矩电流指令。仿真时施加周期为0.2 s,幅值为0.1 A的电流指令,依次加在参考轴qcontrol-45°和qcontrol+45°上。在Maxwell中改变铁氧体伺服电机转子位置,通过反馈转速和角度判断电机转向以及转子初始位置所在的象限。为准备起见,这里用0.01 s和0.20 s时电机转子位移,即反馈位置曲线的斜率来确定转子运动的方向。
实验前在电机前端盖贴一个刻度盘,同时在轴上贴一个箭头(箭头指向d轴)。实验时改变电机转子的初始位置,记录对应的估算位置,将仿真条件的设置和测试转矩指令一样,记录场路联合协同仿真和现场实验结果。图7给出了转子初始位置设置在185°时的仿真和实验结果,图8是转子在不同的位置下初始位置估算实验结果与转子实际位置的比较曲线。
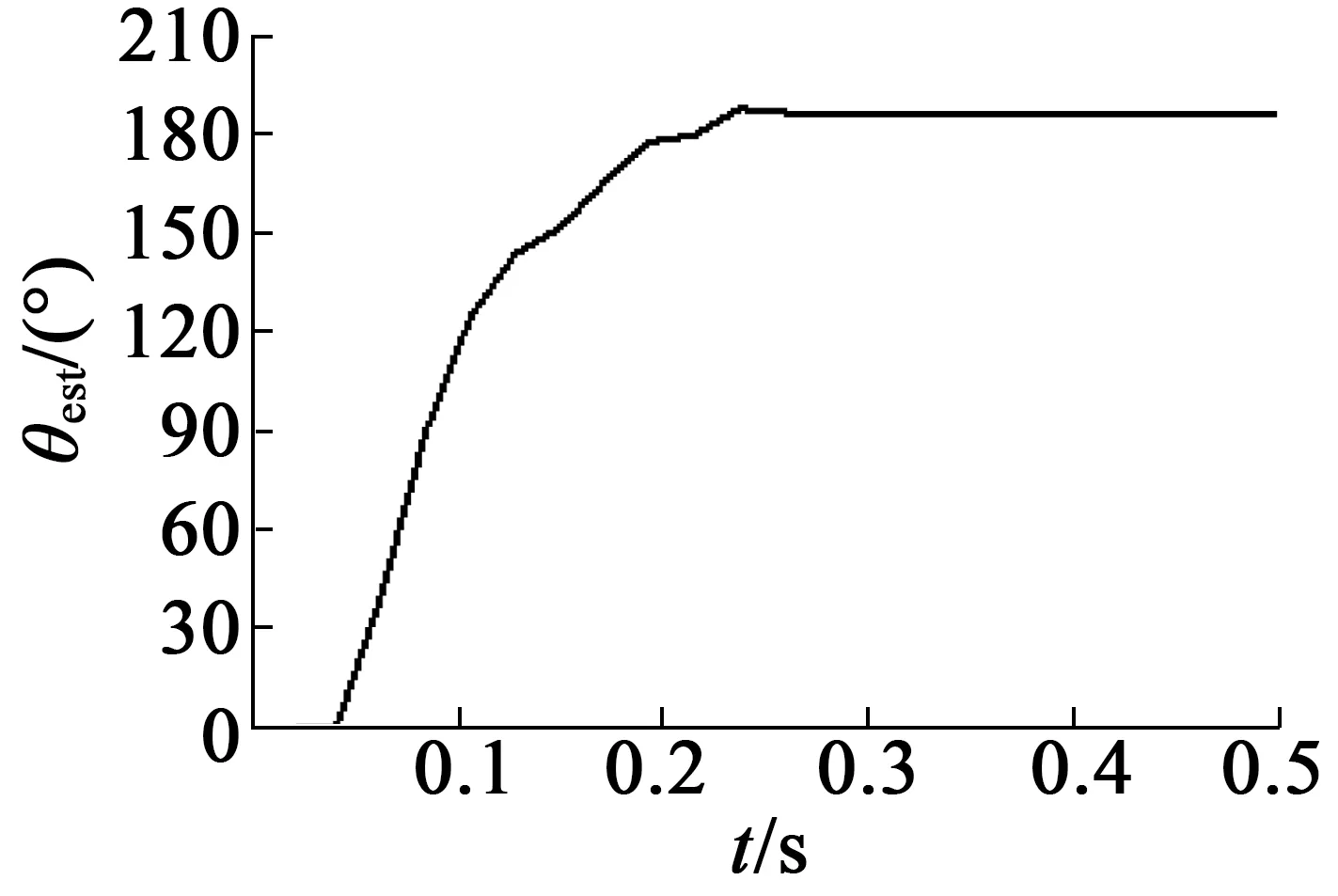
(a) 位置估算协同仿真结果
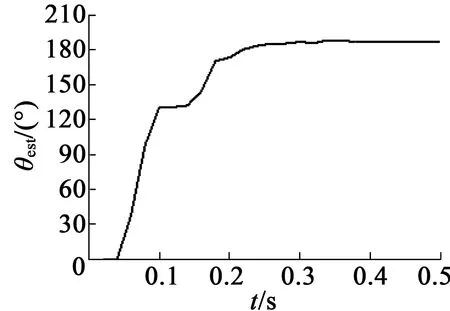
(b) 位置估算实验结果

图8 转子初始位置估算实验结果与转子实际位置比较
图7中,转子初始位置设置在185°时的协同仿真和现场实验都能快速收敛至估计结果,两者误差在2°电角度(机械角度1°)以内,误差较小。图8的转子初始位置估算实验结果与转子实际位置误差波动在-1°~1°之间。可见,本文方法能够比较准确地估计铁氧体伺服电机的转子初始位置。
5 结 语
针对铁氧体伺服电机初始位置定位困难的问题,提出一种基于双坐标参考系铁氧体伺服电机初始位置的估计方法,协同仿真和现场实验验证了该方法的有效性。该方法能避免电机参数变化对位置估计的影响,且只需要通过使用电流控制器和PI控制器来实现,简单易行,所估计的铁氧体伺服电机初始位置和误差角精度高,快速收敛。