基于低频脉冲电压注入的PMSM降噪驱动控制
2018-10-20杨成禹
刘 巍,杨成禹
(1.吉林市广播电视大学,吉林,132001;2.长春理工大学,长春 130012)
0 引 言
为了降低成本并提高永磁同步电动机(以下简称PMSM)驱动系统的可靠性,PMSM无速度传感器控制技术近年来得到了广泛研究[1-2]。通常,无速度传感器控制方案主要分为两类:基于电机模型的方法和基于信号注入的方法。基于电机模型的方法采用反电动势或磁链来进行转子位置和转速的估算,在电机高速运行时效果较好[3-5]。当电机低速运行时,很难用低信噪比反电动势信号来提取转子位置信息,从而需要额外的信号注入到定子中以实现无速度传感器控制[6-11]。信号注入法有不同的类型,包括旋转注入[6-7]、脉冲注入[8]、差分注入[9]和方波注入等[10-11],在电机零转速或低转速时均有较好效果,但通常注入信号属于一种高频信号,感应出高频电流后带来了噪声问题,限制了实际工程应用。
目前已有一些设计方案来降低噪声,文献[12]提出了无额外注入信号的新方法,即在零电压矢量持续时间内,转子位置可通过精确的电流测量获得,却对电流采样噪声极其敏感。文献[13]设计了一种低幅值的注入信号方案,但随着幅值降低,位置估计愈加困难。为了确保合适的信噪比,文献[14]在文献[13]的基础上提出了自适应调整注入电压幅值的方法,其可以调整设定最小幅值,以减少损耗并降低噪声。
调整注入电压信号的频率也是可行的降噪方法,若注入电压信号的频率远高于20 kHz,则噪声不会传入人耳,但是开关损耗将急剧增加。因此,大容量PMSM驱动系统中注入的信号频率难以升高。采用随机调制可以在一定程度上减弱噪声污染,因为其与固定频率的信号相比,能量可扩展到边带频谱,不再产生尖锐的噪声[15],但为了有效地分离基波电流和感应电流,注入频率仍为高频。进一步,考虑低频注入方案,但受滤波器带宽限制,位置估计很难实现。文献[16]研究了应用电磁转矩脉动的低频脉动电流注入方法,位置误差可以通过转矩估算有效地跟踪,但该方法强烈依赖电机参数进行计算。
根据前述文献研究,本文设计了一种基于低频脉冲电压注入的PMSM降噪驱动控制。不同于传统低频注入方案,它无需数学滤波器即可提取感应电流,避免了额外相位延迟,使位置估计更为准确。同时提出一种基于空间傅里叶级数的增强型矢量跟踪观测器,以消除离散位置信号的谐波分量。然后,分析了观测器的稳定性,并采用陷波滤波器消除固定频率谐波,进一步提高了转速估计精度。最后基于PMSM驱动平台对新方案进行了实验验证。
1 基于信号注入的转子位置估计原理
在d,q转子同步坐标系上的PMSM电压方程可以描述[1]:
(1)
式中:ud,uq和id,iq是定子电压和电流;Rs是定子电阻;Ld和Lq是定子d,q轴电感;ωe是转子电角速度;ψf是永磁磁链。
如果电机以低速运行,而注入的电压幅值足够大,则定子电阻上的压降与转速相关项可忽略不计。根据文献[17],注入恒定振幅的Vi时,αβ轴上的电流差可以表示:
(2)
式中:iαi和iβi分别为α轴和β轴感应电流;θe是实际转子位置;Δθ是转子位置估计误差;ΔT是开关周期。K值波动对电流差的影响可通过标幺化来消除:
(3)

(4)
为了获得转子位置,式(4)可通过外差法计算如下:
式中:上标“^”代表估计值;ε是等效误差。如果ε由观测器收敛到零,则可获得转子位置信息。
2 基于脉冲电压注入的无速度传感器控制方案实现
2.1 高频脉冲电压注入方案
数字滤波器被广泛应用于信号注入后的分离处理中,但也存在相位延迟。为此,文献[18]给出了一种无数字滤波器的新型高频脉冲电压注入方案,如图1所示,该方案相当于在电流反馈回路和电流控制器输出中增设开关。图1中,uINJ是注入电压矢量,uFOC是磁场定向控制电压矢量。与传统方法类似,脉冲电压也注入到d,q轴,两者的不同点是传统方案注入连续电压叠加在参考电压上,而新方案注入脉冲电压时将中断正常的磁场定向控制。
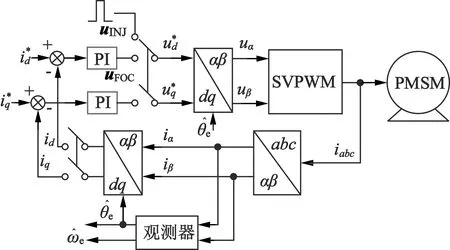
图1 脉冲电压注入方法框图


图2 高频脉冲电压注入序列和感应电流
定子电流在每个采样周期开始时测量。在高频信号注入期间提取感应电流进行位置估算,将不存在基波电流的干扰。电流反馈只有在正常控制时才会打开。在信号注入期间,反馈电流保持最后控制周期中采样的电流值,故方案中不需要使用数字滤波器。此外,正负序高频电压信号同时注入,可消除式(2)中忽略分量所导致的估计误差[18]。图2中2个信号注入周期的电流差:
(6)
从图1中可以看出,通过开关切换,很容易提取到感应电流。但如果注入频率设置较高,则控制频繁中断会降低系统带宽。同时高频信号注入将带来噪声污染问题。
2.2 低频脉冲电压注入方案
为了尽可能减少噪声污染,采用低频信号注入。如图3所示,注入电压的时间间隔延长,间隔期间含有多个控制周期。与高频注入法类似,在脉冲期间进行转子位置估计,不依赖于电机参数和数字滤波器;同时,磁场定向控制依然在所提出的方案中占主导,因此可忽略控制中断的影响。由于注入信号为低频,噪声污染被减弱,提高了系统性能。若进一步降低注入信号频率,则2个相邻信号注入周期间的时间间隔将增加,导致位置估计精度下降。如图4所示,因其更新速度下降,误差增加,估计出来的转子位置不连续,严重时可导致系统失稳。
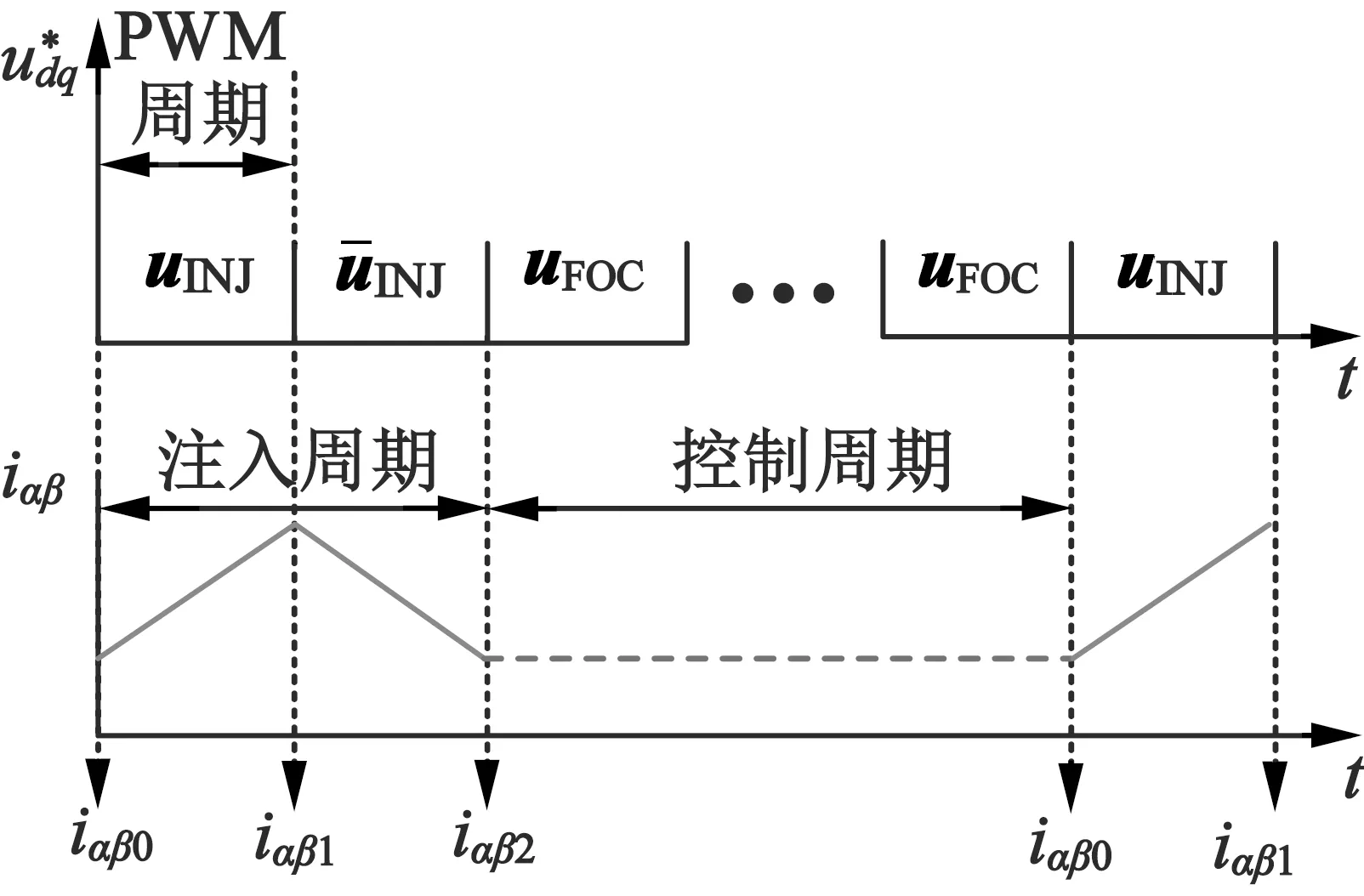
图3 低频脉冲电压注入序列和感应电流

图4 低频注入增大时转子位置估计误差示意图
3 新型低频脉冲电压注入方案
3.1 用于转子位置估计的增强型矢量跟踪观测器
低频脉冲电压注入方案的精度主要取决于注入频率。若注入频率设置为接近人类可以听到的最低频率50 Hz,则转子位置将以50 Hz的固定频率进行更新,这属于非常低的精度。但电机在低速区工作时,即使注入频率设置低,也容易满足奈奎斯特采样定理。图5为离散转子位置空间旋转矢量。其电气循环近似为矢量圆,但由于估计精度低,H通常为不规则多边形,从式(6)中可得H的表达式:
H=cos(θe-δ)+jsin(θe-δ)
(7)
H由一组正负旋转谐波矢量Hh和连续旋转基波矢量Hf构成。H的空间傅里叶级数:
(8)

(9)
为了提取H中2个矢量,离散转子位置空间傅里叶级数可通过式(7)至式(9)得到:
H=Hf+Hh=ej(θe-δ-φ)+

(10)
式中:N表示一个周期内采样次数;φ=π/N为相位延迟;ωi是注入信号频率。与低分辨率霍尔位置传感器应用不同,在该无传感器方案中,由于系统运行频率与转速相关,故N不再是固定的,其具体计算如下:
(11)
式中:ωe是系统运行频率。基波矢量Hf是高分辨率的理想转子位置,谐波矢量Hh是需要消除的干扰。为了获得准确的转子位置,设计了离散增强型矢量跟踪观测器,如图6所示。
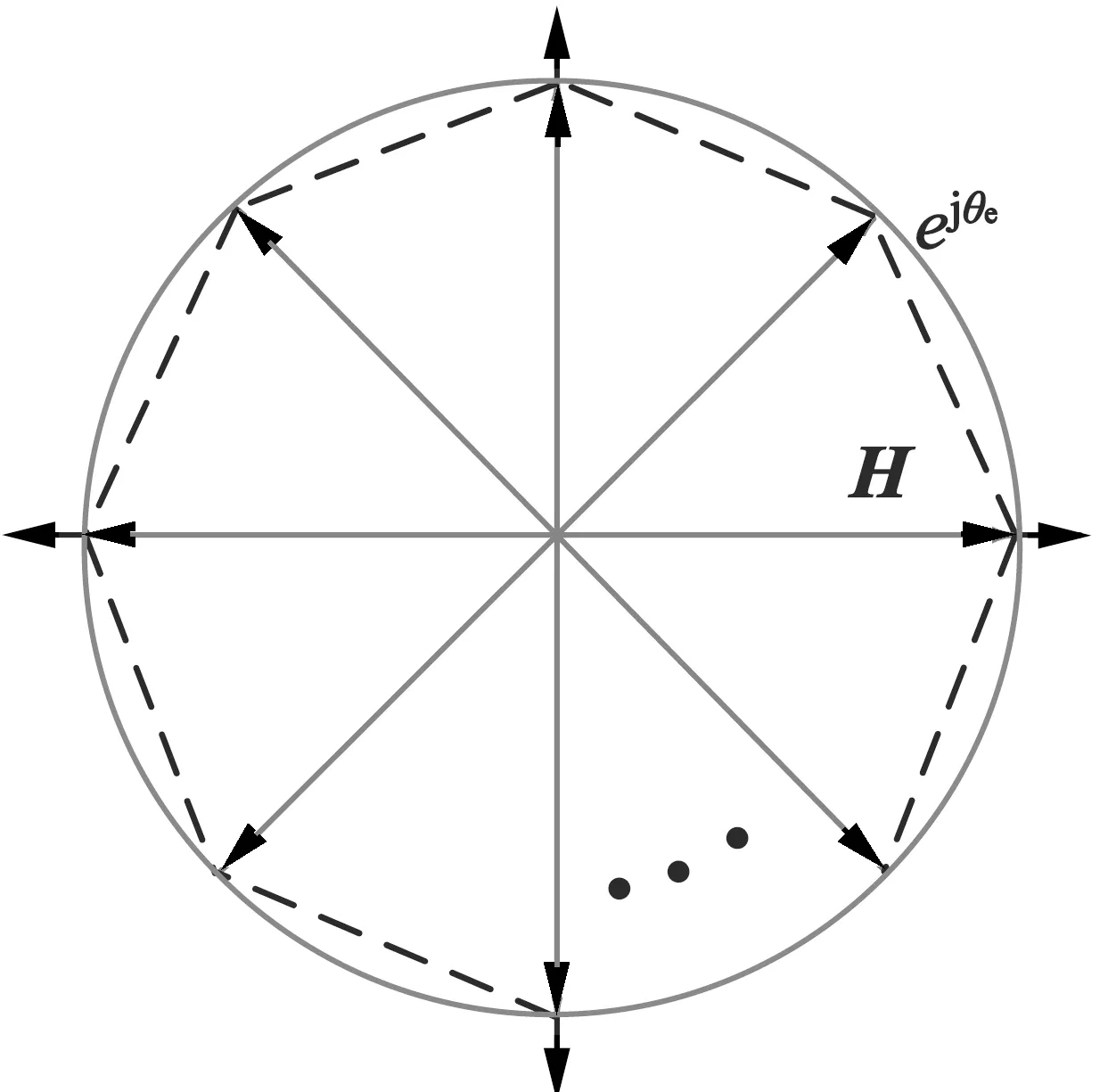
图5 低频脉冲注入对应的离散位置矢量
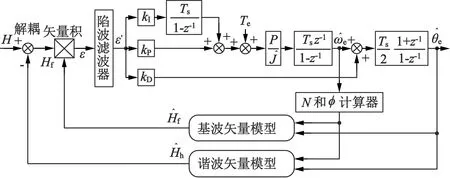
图6 新型矢量跟踪观测器结构图

(12)

(13)

(14)

(15)
式中:Δθ为估计位置误差。如果Δθ足够小,式(15)可看作是一个线性函数,那么当ε收敛到零时可获得转子位置。
3.2 观测器稳定性分析
由于观测器使用了附加的非线性反馈,需要对其进行稳定性分析。对于全局稳定性,类似于传统标量Luenberger拓扑一样,取决于特征值选择。
(16)
式中:λ是三重根。然而,反馈中非线性因素会影响局部稳定性。如果观测器稳定,在负反馈下,Δθ和ε的极性应相同。为了分析反馈闭环的非线性特性,删除了正向通路中的PID控制器和陷波滤波器,这意味着Δθ和ε的变化仅受反馈的影响。为了简单说明稳定性,将H和θe设置为零,并用不同的频率和幅值设置变化的Δθ,以判断稳定性如下:
(17)

(18)

(19)
图7为Δθ和ε的变化关系,在图7(a)中,基波矢量模型仅用作反馈,Δθ以步长1 Hz进行变化,变化范围从-3.14~3.14 rad。可以看出,ε与Δθ具有相同极性,这意味着负反馈将保持误差范围。如果Δθ超过π,则误差ε将具有相反的极性,但由于采用的是闭环框架,Δθ超过π不易形成,故基波矢量模型的非线性对系统稳定性影响不大。在图7(b)中,Δθ的设置与图7(a)中相同,但基波和谐波矢量模型均用于反馈。与图7(a)结果相比,由于谐波解耦的影响,出现了一些振荡,但整体趋势相似。在图7(c)中,Δθ的步长提高到5 Hz后,其分辨率将进一步降低,导致局部出现不稳定区域,虽然全局稳定性不受影响,但估计的位置信息在局部不稳定区域时将产生小范围振荡。

(a) 仅使用基波矢量模型

(b) 同时使用基波和谐波矢量模型

(c) 步长提高至5 Hz

图8 估计转子位置的频域分析
3.3 估计误差的负面影响和进一步降低谐波
实际工程中,无速度传感器控制器依然存在转子转速和位置估计误差。如果误差进入反馈,则谐波矢量不能完全解耦,因此基波矢量跟踪性能受到影响,这将导致前述的局部不稳定,应该进一步降低谐波的负面影响。为了便于分析,对转速和位置估计误差的影响分别讨论如下。

基波矢量估计值可从位置估计值获得:
(22)
联立式(21)和式(22),可得到等效位置误差:

式(24)的转速估计误差对ε的影响如图9(b)所示,其中Δω设置为-π~π rad/s,注入频率设置为50 Hz,转子频率为5 Hz,ε包含了较大的谐波分量,降低了观测器性能。结合式(23)和式(24),可得到不同ωe(0~5 Hz)对应的ε值。图中可以看出ε在低速区中包含了固定频率的谐波分量,这不利于位置估计。故在所提出的矢量跟踪观测器中采用了陷波滤波器,如图6所示。陷波滤波器的传递函数:
(25)
式中:ω0为陷波频率;k1为影响陷波宽度的参数;k2为影响陷波深度的参数。

(a) 位置误差的影响

(b) 转速误差的影响

(c) 位置和转速误差综合影响
4 实验验证
为了验证新型基于低频脉冲电压注入的PMSM降噪驱动控制策略的效果,搭建了如图10所示的实验平台,实验中PMSM的参数如表1所示。负载转矩采用连轴耦合感应电机,算法核心采用DSP芯片TMS320F28335,逆变器开关频率设置为6 kHz,注入脉冲电压幅值和频率分别为120 V和50 Hz,观测器的三重根设计为-30,2个陷波滤波器的陷波频率为50 Hz和100 Hz,滤波器参数k1=0.2和k2=0.01。

图10 PMSM实验平台

参数数值参数数值额定功率Pn/kW2.2额定转矩Tn/(N·m)21额定转速ωn(r·min-1)1 000定子电阻Rs/Ω2.75额定电压Un/V380永磁磁链ψf/Wb0.56额定电流In/A5.6d轴电感Ld/mH48额定频率fn/Hz5q轴电感Lq/mH59
4.1 位置观测器验证
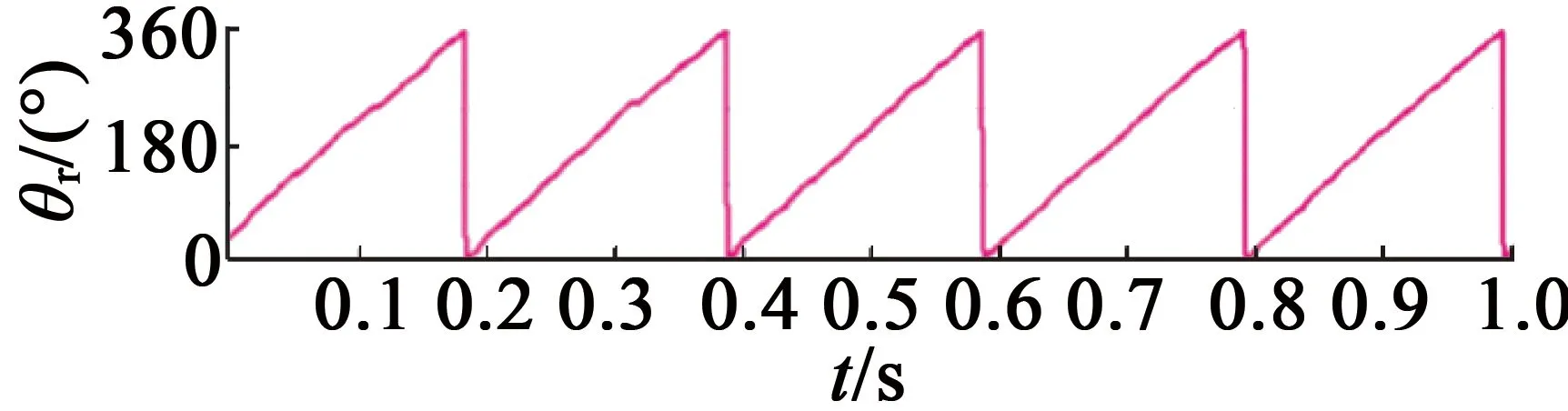
首先开展对位置观测器的验证。图11为PMSM转速为100 r/min时的位置估计实验结果,包含了实际转子位置、离散转子位置和电机相电流波形。在注入电压的作用下,额外的电流纹波出现在相电流波形中,其包含了转子位置信息,对电流进行微分可在没有数字滤波器的情况下获得转子位置,但估计精度受到限制。为了提高转子位置分辨率,设计了基于谐波分析和陷波滤波器的增强型矢量跟踪观测器。图12为电机以转速100 r/min运行时的实验波形。图12(a)和图12(b)为不采用观测器时的基波矢量和谐波矢量波形,图12(c)为采用观测器和陷波滤波器后的基波矢量波形,从波形可以看出,观测器结合陷波滤波器能较好地提取出基波矢量,有利于提高位置估计的精度。

(a) 实际转子位置

(b) 离散转子位置
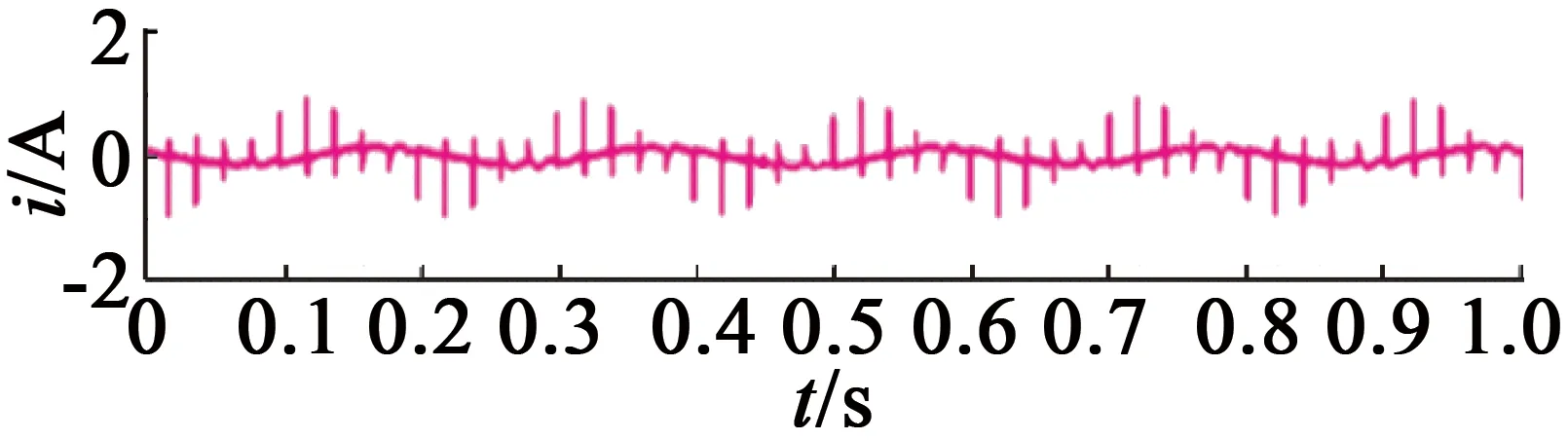
(c) 电机相电流

(a) 不使用观测器时的基波矢量波形
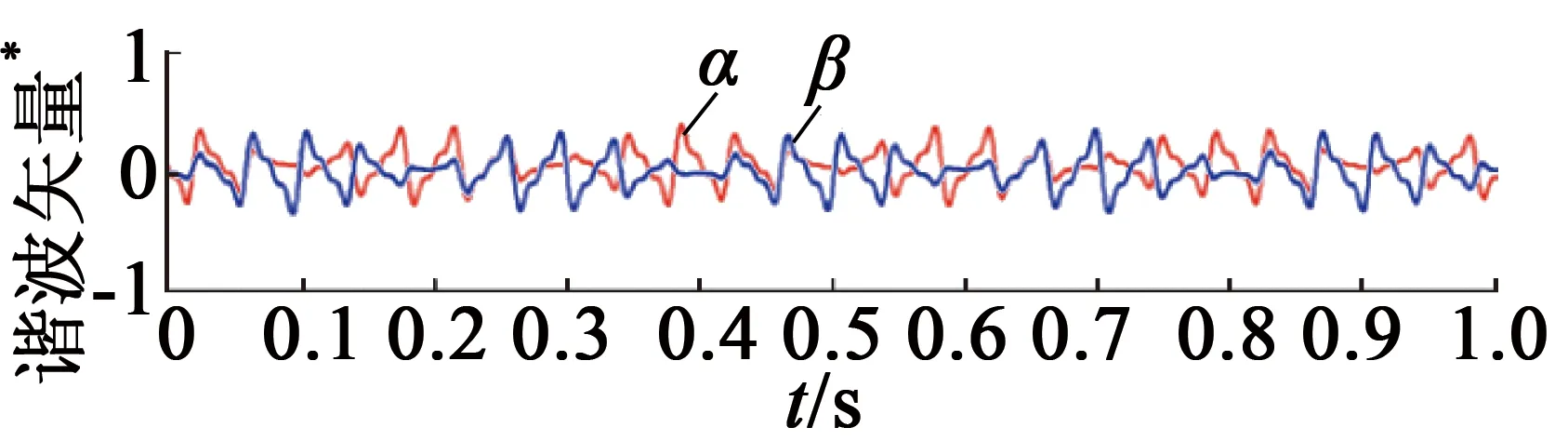
(b) 不使用观测器时的谐波矢量波形

(c) 使用观测器和陷波滤波器时的基波矢量波形
4.2 无速度传感器控制器验证
下面进一步对PMSM无速度传感器控制系统的性能进行验证。图13为转速为100 r/min时的实际转子位置、离散转子位置和估计转子位置波形,可以看出,估计转子位置较之离散转子位置更为平滑。尽管注入频率设置得较低,但仍可以有效地提取转子位置。图14为电机转速从100r/min至-100r/min再回到100 r/min时的动态实验波形,整个动态过程中位置估计误差在20°以内。图15为电机控制在零转速时,突加额定转矩负载的实验波形,整个动态过程中位置估计误差在30°以内。为了证明新型控制策略可降低噪声的优点,给出了采用高频注入(1 kHz)和采用低频注入(50 Hz)时电机相电流的功率谱对比分析,如图16所示。从图16中可以看出,高频电压注入下,电流功率的分布集中在注入频率和谐波频率上,其处于人能敏锐听到的频率范围内,噪声非常尖锐。而对于低频电压注入,电流功率的分布转移到低频区域,声音更柔和。

(a) 实际转子位置

(b) 离散转子位置
(c) 估计转子位置
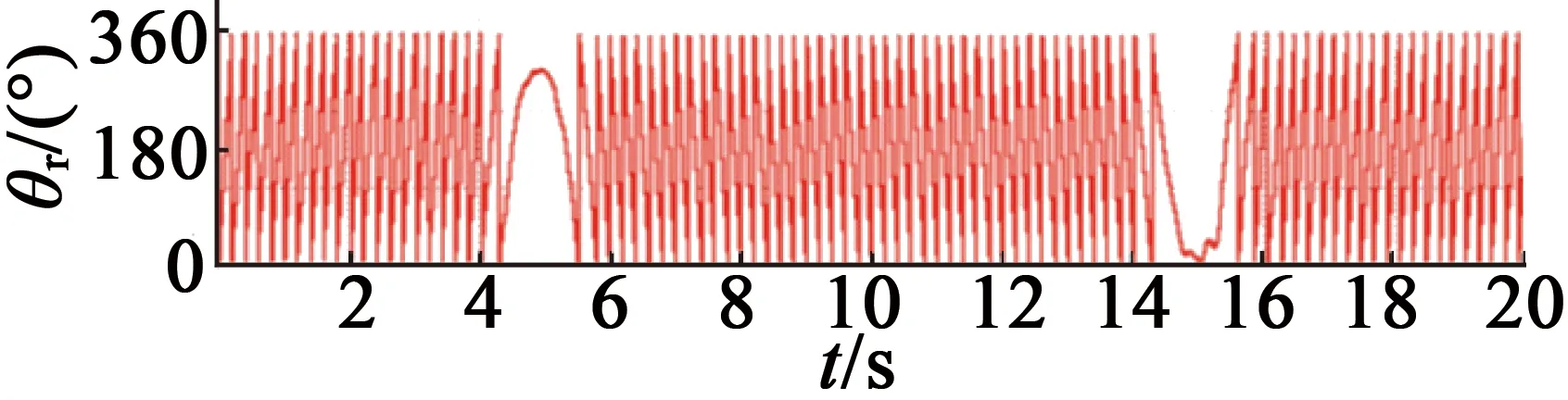
(a) 实际转子位置

(b) 转子位置估计误差

(c) 转速
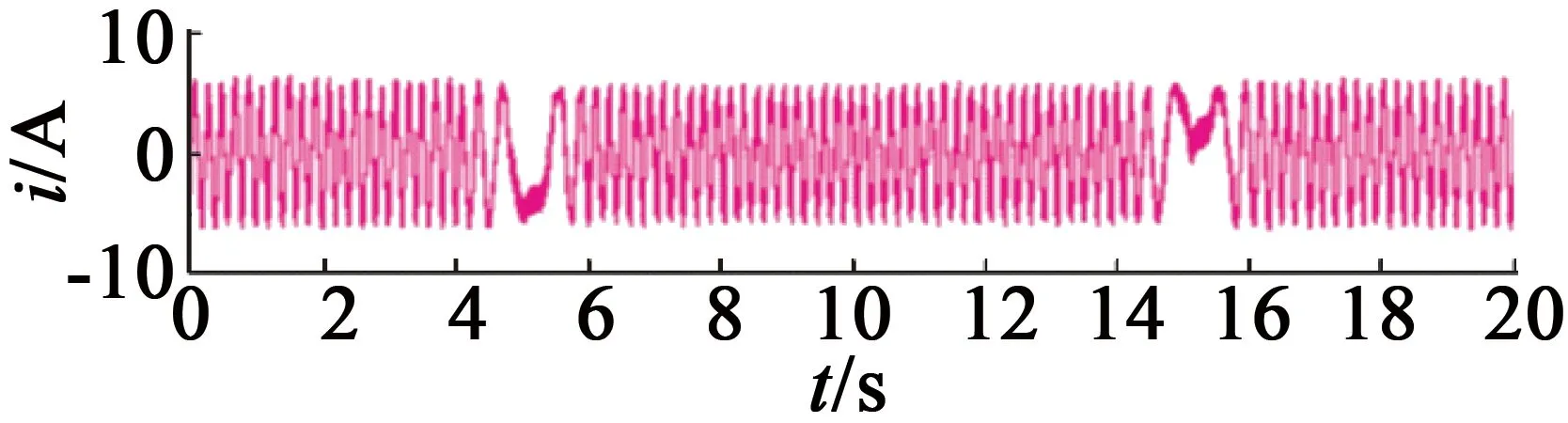
(d) 相电流
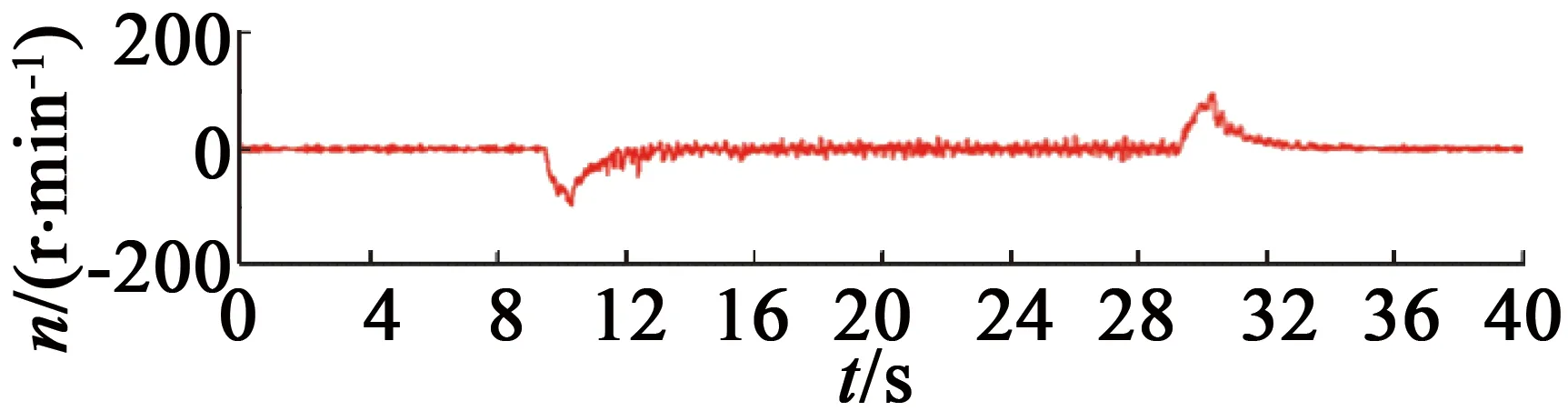
(a) 转速

(b) 转子位置估计误差
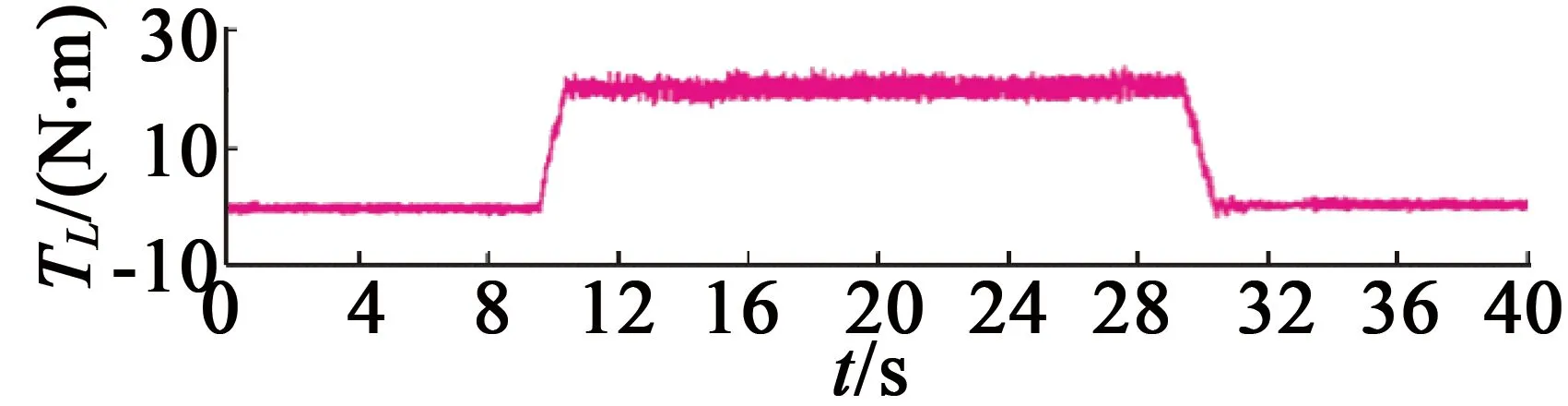
(c) 转矩

(a) 高频注入方案

(b) 低频注入方案
5 结语
围绕着PMSM低噪声驱动控制器设计问题,提出了一种新型的基于低频脉冲电压注入的PMSM无速度传感器控制策略。通过理论设计和实验,可得出如下主要结论:
1) 通过分离注入周期和磁场定向控制周期,可在没有滤波器的情况下有效估计转子位置。但注入频率低会导致位置估计精度的降低,而采用基于增强型矢量跟踪观测器可消除离散位置信号的谐波分量,从而提高位置估计精度。
2) 对观测器的稳定性进行了分析,采用陷波滤波器来降低固定频率谐波。
3) PMSM低速运行实验结果验证了新型控制策略的有效性。
在实际工程中,低频脉冲电压注入方案主要用于估计电机低速运行时的转速。对于宽域转速的电机,可以进一步开发一种结合电机模型和低频脉冲电压注入的复合无速度传感器控制策略。