基于伺服控制技术的下肢智能训练系统研究
2018-10-18金振华王京华韩爱民成志新陈剑英李尚宾孙谦
金振华,王京华,韩爱民,成志新,陈剑英,李尚宾,孙谦
(山东省药学科学院,济南 250101)
1 引 言
当今中国随着老龄化的加剧,越来越多的人因为脑卒中等疾病导致下肢运动障碍。研究表明,下肢运动障碍患者能够通过积极的康复训练获得较好的治疗效果[1-4]。
传统的康复训练治疗的方法存在一些不足,传统康复训练通常由康复医师进行按摩和训练的方式来治疗,患者增多造成康复医师的数量短缺,并且按摩治疗作为一种高强度治疗方式,对医师的精力及体力均具有较大的挑战,康复训练受到医师主观条件的制约和限制,治疗中的运动参数无法准确反馈及控制等一系列问题[5-9]。
目前国内外在此领域进行了诸多研究,如苏黎世Balgrist医学骨髓康复中心研制的LOKOMAT康复机器人,通过机电设备辅助患者进行行走训练[10];南洋理工大学设计的BWSLT步行训练设备,通过为患者进行步行训练让患者恢复运动能力[11]等一系列的运动康复训练设备;国内研究有浙江大学设计的用于康复治疗下肢外骨骼辅助行走机构[12],哈尔滨工程大学研制的助行机器人等[13]。
针对下肢运动障碍患者的康复训练的需求,我们设计了一套下肢智能康复训练系统。通过借助计算机技术和自动控制理论,利用单片机来控制伺服电机系统,带动行走机构模拟正常人体的行走运动,实现对患者进行科学有效的下肢康复训练治疗。
2 系统总体设计
本系统通过单片机控制两台伺服电机分别独立控制左右双腿,在训练过程中两台伺服电机进行相反方向的运动,并设定起始位置和终点位置,分别在起始位置和终点位置间不间断循环往复,并且运动方向相反,来实现分别控制双腿交替向前和向后运动,实现模拟人体正常步行的功能。训练中的时间、速度参数以及开始和结束训练由上位机设置,通过上位机按下开始按钮,命令便传导给下位机开始按照设定的速度和时间,控制两台伺服电机开始按照交替向前和向后的方式带动双腿开始运动,当到达设定的时间便停止运动。以此方式来实现对下肢运动功能障碍患者进行行走康复训练。
下肢智能训练系统分为上位机系统和下位机系统两部分,上位机用来设定治疗时间、速度及痉挛灵敏度等治疗参数,开始及结束治疗,记录患者资料数据库及储存治疗记录等,并通过与下位机进行通信来实现对系统控制,包含人机交互界面模块、通信模块、控制模块和数据库系统模块;下位机通过接收上位机传来的控制参数及控制命令,来驱动伺服控制系统进行运动,并实时读取传感器反馈数据来实现闭环控制,并将运动数据实时反馈上位机,以及通过急停按钮使系统紧急停止。包括核心控制模块、伺服控制模块、电源模块、传感器模块和紧急停止模块等,系统的总体结构图见图1。

图1下肢智能训练系统总体结构图
Fig1Theoverallstructureoflegsintelligenttrainingsystem
3 下位机系统设计
下位机系统硬件主要为单片机核心控制模块、伺服驱动模块、A/D信号采集模块、紧急停止模块等部分。下位机硬件电路编辑采用Altium Designer软件工具进行绘制,下位机软件采用ICCAVR环境下C语言进行编写。核心控制芯片采用ATmega16单片机,来实现对下位机系统的核心控制功能,实现AD数据采集、驱动伺服控制器以及控制算法实现等功能,是整个下位机系统的核心[14]。伺服驱动模块是单片机对伺服驱动器的控制电路,通过给伺服控制器脉冲信号及其他驱动信号来驱动伺服电机进行运动[15]。
伺服电机系统采用松下A5系列伺服电机作为动力系统,可满足高精度、高性能的系统动力需求。其中,伺服电机控制系统是采用位置控制模式下,通过给伺服控制器一定频率的脉冲来驱动伺服电机转动,然后由伺服电机带动行走机构进行运动治疗。
通过AVR单片机T1定时器工作在CTC模式下,并将AVR单片机引脚OC1A和OC1B设定为信号输出模式,便可在单片机引脚OC1A和OC1B分别产生方波脉冲信号输出作为伺服电机脉冲控制信号,通过调整T1定时器的寄存器参数可调整脉冲频率大小,来调节伺服电机速度,并通过AVR单片机PB1和PB2端口的高低信号来分别控制左右腿伺服电机运动方向。此时,将伺服电机工作方式设置为位置模式,PULS引脚和SIGN引脚分别接收单片机发来的脉冲信号和方向信号,脉冲PULS信号和方向SIGN信号分别控制伺服电机的运动速度和运动正反向来控制伺服电机的运动。
A/D(模拟/数字信号转换)信号采集模块采用AVR单片机自身携带的A/D寄存器,A/D通过角度传感器获取左右双腿运动的角度位置信号,通过角度位置信息来判断双腿当前运动位置,判断是否运动到指定的角度位置,如判断已到达指定起终点位置,便驱动双腿伺服电机进行反转来实现往复循环运动。A/D模块通过运算放大器对信号进行滤波并放大来实现对传感器信号的采集,并将采集到的信号送入单片机进行读取以及进一步处理;A/D信号滤波及放大电路设计图见图2。

图2 A/D信号采集电路
同时会不间断检测系统急停状态,患者按下紧急停止按钮,便会触发一个低电平信号,此信号与AVR单片机外部中断引脚INT0连接,当AVR单片机检测到该信号时,便会自动触发AVR单片机进入外部中断处理程序,控制伺服电机停止运动,使系统停止运动。
4 系统PID控制系统设计
下位机启动后,就将等待接收上位机传来的控制参数及控制命令,当下位机检测到上位机传来的数据后,对数据进行处理,按照上位机设定的参数及控制命令向伺服驱动器发出控制命令。同时开始读取角度传感器数值,对当前运动角度进行检测,来与系统设定值作对比,将差值根据PID(比例-积分-微分控制器)控制算法计算输出控制量,精确控制伺服驱动器按照上位机设定的参数进行治疗。
伺服系统采用闭环负反馈控制方式,通过数字PID增量型控制算法来实现对系统行走机构运动的精确控制。数字PID增量控制算法是在PID控制算法的基础上经过离散化得到的,便于微处理器计算的一种控制算法,本系统数字增量型PID控制器控制框图见图3[16]。

图3系统数字增量型PID控制器结构图
Fig3SystemdigitalincrementalPIDcontrollerstructure
PID控制器算法的微分方程为:
其中e(t)=r(t)-c(t)
将其离散化为数字PID控制算法表达式为:

为便于微处理器进行计算,采用数字增量式PID控制算法进行计算,数字增量型PID控制器运算方程为:
Δu(n)=u(n)-u(n-1)
将系统运动设定运动角度值r(t)与系统经传感器反馈回来的实际角度值c(t)进行求差,得出系统运动的角度偏差值e(t),然后通过PID控制算法进行计算求出需要对伺服系统给出的控制量Δu(n)大小,来控制伺服电机带动行走机构,以实现对系统精确的运动控制。
5 上位机软件设计
上位机由人机交互界面、通信模块、控制模块以及患者数据库系统组成。上位机软件采用Visual Basic语言进行编写,编程环境采用微软Visual Studio。人机交互界面用来实现用户与计算机之间数据交互的目的,用户可以在上位机软件界面上设置治疗参数,操作开始治疗及结束治疗,以及查看治疗记录等功能。
用户通过点击软件界面上的上下箭头按钮,调整设定左右腿运动的角度范围,并通过调整界面上的左右箭头调整运动速度和治疗时间参数。当这些参数设定完成后,通过点击“开始”按钮,开始治疗。此时,用户设定的“活动范围”“速度”“治疗时间”等参数以及开始命令参数将通过通信模块传递给下位机,上位机与下位机之间通信采用232串行总线通信协议实现,上述数据及命令将会转换成十六进制数据并组织为一个队列按字节传递给单片机,当这些数据到达单片机时,单片机便会触发串行数据接收中断,将这些数据按照统一协议重新转换为相应数据和命令,并按照相应的数据和命令驱动伺服电机开始工作。同时单片机启动定时器进行计时,当治疗时间到达设定的时间之后,同样会将一个结束命令传递给上位机,上位机接收到结束的信号时,便结束治疗过程。
本系统携带患者数据库系统,数据库采用微软Access数据库系统,通过Visual Basic中的(active data objects data base,ADODB)对象实现建立数据库的连接、存储和读取工作,用户可以在患者信息界面将患者信息录入各关键字段作为一条记录录入数据库,同时每次治疗,系统都会将此时的患者信息和治疗参数作为一条记录进行自动存储,作为患者治疗记录进行备案。系统界面见图4。
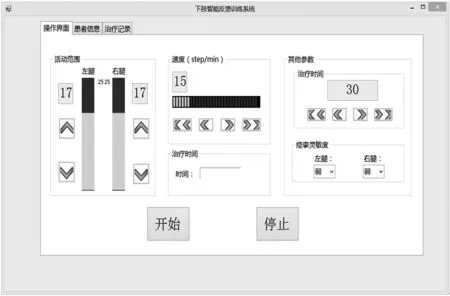
图4 上位机程序控制界面图
Fig4Hostcomputerprogramcontrolinterfacediagram
在上位机界面上用户可以对痉挛灵敏度进行设置,设置是数据会通过232串行总线传递给下位机,下位机通过检测伺服电机反馈的力矩参数,来判断患者是否出现痉挛,当力矩参数超过正常范围一定比例时,系统便判断患者出现痉挛,此时便会结束治疗。
6 总结
本研究针对下肢运动功能障碍患者康复训练需求,通过结合计算机和单片机技术,利用伺服控制系统设计了一种下肢智能训练系统。给出了系统的整体模块结构图,并对系统下位机软件和硬件及上位机软件进行了详细分析。相对于目前传统治疗及其他类似产品,本系统极大的减轻了医疗人员的工作强度,简洁易用的界面更便于患者操作,通过计算机及PID控制算法提高了伺服系统控制精确度,并且通过自动痉挛检测功能有效的保护了患者不受伤害,通过数据库有效存储了患者治疗数据作为后续治疗参照。经过实验,本系统对于下肢运动障碍患者具有较好的训练效果,满足了对患者进行精确康复训练治疗的需求。