康复移位机构型综合和尺度优化研究*
2018-10-18任武任琼琼赵宗亚于毅
任武,任琼琼,赵宗亚,于毅
(新乡医学院生物医学工程学院,新乡市神经传感与控制工程技术研究中心,新乡市生物医学信息研究重点实验室, 河南 新乡 453003)
1 引 言
近年来计算机在辅助医学工程设计和分析中作用明显增强,为临床医学研究和应用提供了重要支持。截至2016年底,我国残疾人口总数达9 000万,其中肢体残疾2 472万人。患者康复移位机能实现患者在床上、卧室、餐厅、浴室、卫生间方便转移的功能,因此有广泛应用前景。
国内外对移位机的研究主要有:1975年美国Brown设计了一种用于定位升降机或变速器的升降装置,减轻了护理人员的工作量,开创了移位机研究的先河,但未对升降装置的结构做详细设计描述[1]。1996年美国Capaldi等将房顶安装吊轨的移位机进行改进,实现了将患者在室内进行任意位移的改变的功能,是现代固定移位机的雏形[2]。1998年美国Simon 设计了一种用于提升和转移患者的便携式升降装置,有利于帮助医生和护理人员对下肢瘫痪患者进行护理和检查,在移位机综合性能设计上有了突破性进展[3]。2001年美国Hakamiun设计了一种支撑腿可线性伸缩和角度开合的患者提升装置,具有防止提升患者的过程中提升装置发生偏移的作用,此结构的设计增加了移位装置的安全性[4]。2014年美国Martin等人设计了一种稳定、安全的提升装置,并且能够增加使用人员舒适度的设计,易于操纵和操作[5]。国内2002年高进钦等设计了防止使用者身体向后倾倒的电动移位机,以电动代替手摇,将设计理念从手动转移到了电动,大大降低了看护者的劳动强度[6]。2012贾祝军等设计了一种利用托起悬挂的吊挂装置将重症患者托起,且底盘四角带有万向活动的万向轮,一人就可将患者轻松地转移到重症患者移位机上,在功能多样化和患者使用针对化方向上又迈进了一步[7]。2012年王英会、刘珊设计的采用以电为驱动的Z字型结构的插板式座椅和护肩,避免了像吊兜式穿戴的麻烦,降低了操作时间[8-9]。朱迺易、陈宣豪等人对移位机的设计和应用做出了探索,设计了一种电动移位机,并对移位机的运动做出了规划[10-11]。此外,计算机辅助设计在康复机械相关领域的研究还有:张宇利用Matlab对末端牵引式某康复设备进行了轨迹运动规划设计,并对其进行运动控制研究,使设备能按照人体的运动特点来调节[12]。Guess等利用ADAMS对人体膝盖骨进行了离散动力学仿真,为临床外科手术操作提供数据保证[13]。Xie在其康复器械论著里,对康复机器人的动力学特性研究和人体四肢轨迹规划做了探讨,为人机工程学做出了贡献[14]。Rice利用计算机模拟系统研究了固定式和移动式搬运器受力分析,得出两种不同形式设备的优缺点,为家庭康复护理提供帮助,利于康复设备个性化,家庭化和社会化的发展[15]。Bostelman对康复机械家庭化使用做了研究,旨在减轻康复护理医院和社区负担,并对某护理中心的使用状况做了调查分析,指出了下一步发展方向[16]。Krishnan专门对老年人康复设备的自动化系统做了研究,旨在降低使用复杂度,方便肢体功能缺陷人员使用[17]。另外,计算机在图像识别等领域还有广泛应用,程勇把计算机技术应用到人脸识别技术中,可为法医人员提供帮助[18]。计算机工程在医疗大数据分析和诊断方面同样发挥着重要作用[19]。
综上,计算机辅助设计(CAD)和计算机辅助工程(CAE)在医学工程设计分析中虽有一定应用,但是应用还相对薄弱,还没有对患者康复移位机的建模设计以及乘坐分析的研究。本研究在现有专利定性分析基础上,对移位机不同载荷下所需具体尺寸的综合设计和针对设备自重进行轻量化优化分析。利用Creo/parametric建立了某康复移位机三维模型,然后利用Creo/simulate有限元模块对移位机进行结构分析,得出工作中较大应力分布区域,对结构优化提供定量支持,并进行相应乘坐实验研究,与市场上某产品进行了对比研究,验证设计的正确性和可行性。
2 移位机建模
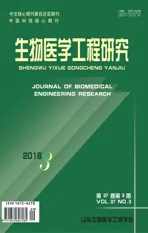
移位机主要由支架、立臂、摆臂、吊架、支腿、摆杆、液压缸、脚轮、推手、吊袋等部件组成,其承重部分有支架、立臂、摆臂、吊架、支腿、液压缸,见图1。
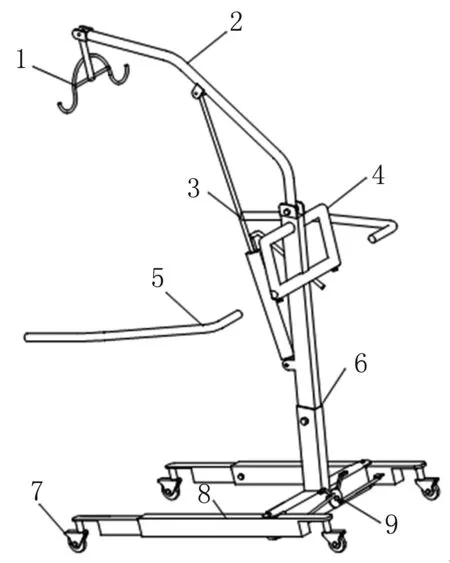
图1 移位机三维模型
1.Hanger2.Boom3.Rodofhydrauliccylinder4.Armrestbox5.Armrest6.Supportboom7.Caster8.Support9.Openingandclosingdevice
模型底部为支架,弹簧控制支腿开合角度,支腿通过四个万向轮在地面上起支撑作用。支腿上面是立臂,立臂是起到主要承载作用的部件之一,立臂上安装有液压缸连接铰。本样机模型立臂和支架采取方钢结构,立臂的高度决定了总的升降高度。根据普通人群的统计学规律,设计的立臂高度为1.5 m,立臂和摆臂通过圆柱铰链连接在一起,摆臂主要控制人员移位。其也是主要承载构件,立臂和摆臂通过液压缸连接起来,通过推杆的伸出和回缩控制驱动摆臂升降,立臂、摆臂、液压缸和液压缸推杆构成了典型的四连杆机构。摆臂末端有吊架,吊架上面悬挂着用于人员乘坐的吊带,吊架可以360度旋转,用于克服患者移位过程中由于晃动带来的不便。其它部件在结构承载分析中起到的作用比较小,为了减少分析时间增加分析效率,本分析模型将其用质量块等效。
3 移位机有限元结构分析
在Creo/parametric将建立好的三维模型导入到其有限元分析模块Creo/simulate中进行模型前处理。为使有限元分析更加顺畅,需要在划分网格时提高网格质量,对细小特征进行抑制,主要包括:去掉开合装置、取消倒角、取消小孔,将臂架连接处等效为自由连接,将销孔、销轴等效为自动销轴连接,将液压缸和主体支柱、吊臂连接处等效为自动焊接,划分单元为四面体单元,单元个数为63080;施加的载荷模拟最大为120 kg,将人的主要受力点作用在吊钩两侧和扶手两侧,考虑到吊钩仍然是力载荷接触部位,在两侧吊钩处施加的力分别为550 N, 在两侧扶手处施加的力分别为50 N;考虑到万向轮和地面实际上是线接触,为了不影响分析效果,约束其六个自由度,施加载荷和约束的模型见图2。

图2 约束和载荷施加
然后进行有限元计算,可得整体最大应力约为166 MPa,位于液压油缸推杆和摆臂连接处的上端,因此,本设备的主要受力校核危险区域多位于此,是研究的重点。应力最大主值分析见图3。

图3 移位机应力云最大主值图
通过局部放大图4可知支撑臂与油缸连接处也是主要校核的部位,其最大应力达到了153 Mpa,满足Q235钢屈服强度的需要。

图4 油缸、立臂连接处局部应力
图5为整机在模拟载荷作用下最大的变形量,通过云图可以得出在载荷120 kg的人模拟下,设备末端的最大变形量达到了20.3 mm, 位于材料的弹性变形范围内,符合材料强度要求。

图5 位移变形云图
4 构件灵敏度分析
结构分析之后,根据康复患者的使用要求,对移位机关键部位零件进行灵敏度和优化设计,确定最终整机尺寸,得出最优化的移位机模型。
图6主要研究吊臂内径和外径的尺寸,吊臂外径为35 mm, 因此,内径的尺寸决定了承载和总质量的关系。设定了变量d339内径灵敏度从20 mm到40 mm进行选择,步长设定为1,直到承载总质量最小时停止,见图6。

图6 吊臂灵敏度设计
根据步长计算结果,在吊臂内径32 mm、主体支柱内径33 mm时,液压缸推杆与吊臂连接处的最大主应力达到了232 MPa, 已经接近材料强度极限。吊臂内径在27 mm时,应力在材料屈服极限内,但是造成了吊臂质量的增加,因此吊臂的内径选用30 mm最为合适。112 kg载荷在此尺寸的最大位移达到39 mm, 对主体支柱进行优化设计后上图变量d356使其在满足需用应力下最大化降低质量,最终使整机满足使用要求的同时实现机身最轻化。
5 乘坐试验研究
根据上文设计计算研制出相应的样机,在我校生物医学工程学院从2014、2015、2016级在校生中选取了60名同学进行乘坐试验。典型身高体重人员参数见表1,样机参数见表2,人员基本情况见表3,图7为典型身高体重人员乘坐试验图。
参与测试人员从大一到大三共60名同学,每名同学均进行模拟椅子起升和放下动作。其中男生共33人,女生27人,他们的身高范围149~195 cm,体重范围40~112 Kg,年龄位于18~24岁间,此样本符合我国成年人群的体重和身高正态分布。

表1 不同样机乘坐试验人员身高、体重参数

表2 样机设计技术指标和参数
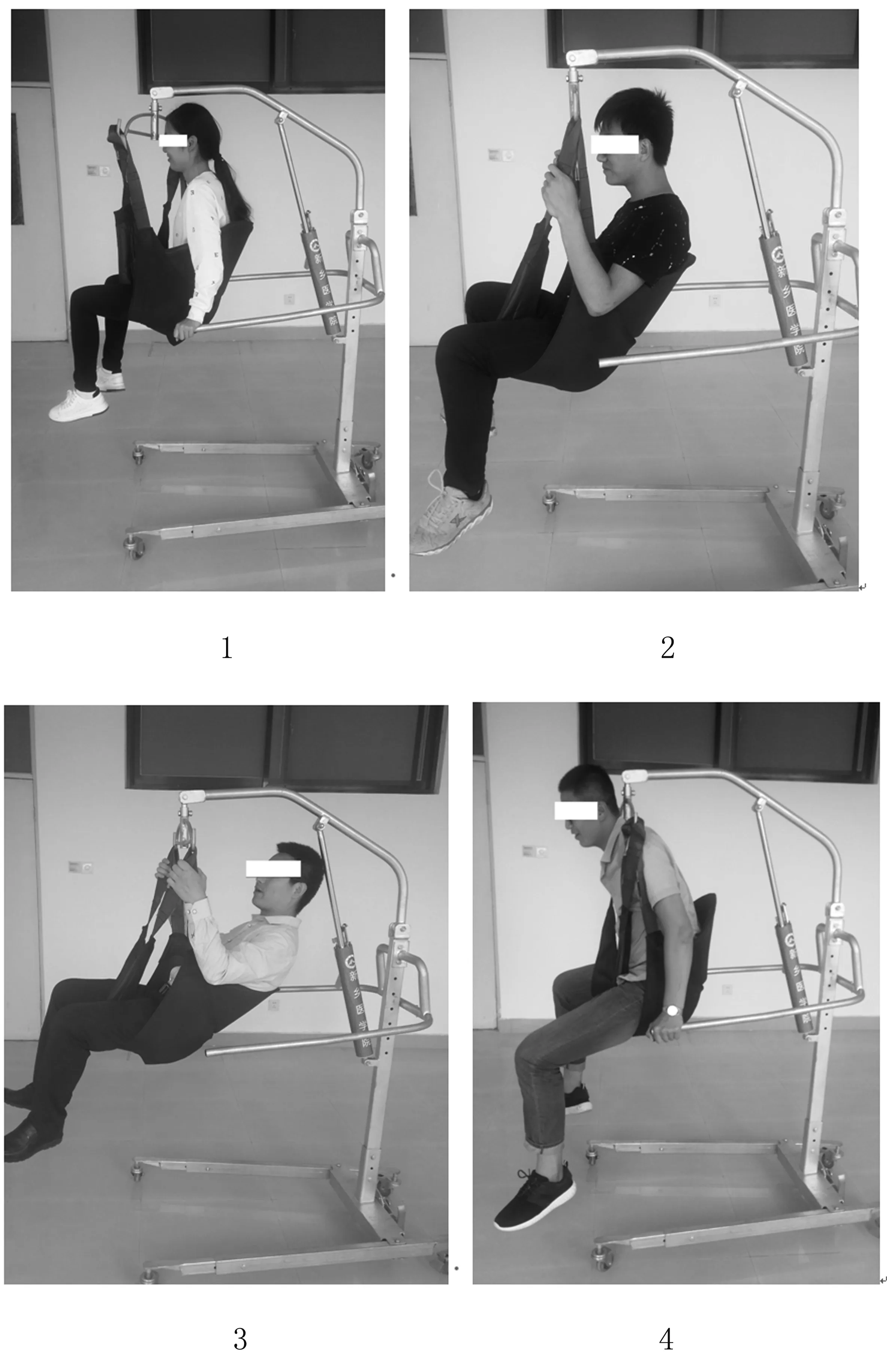
图7不同质量、身高人员样机乘坐试验
Fig7Differenthumanheight,weightinprototyperidetest
表3 乘坐试验人员基本参数
图8为得到体重的不同实验人员乘坐和吊臂末端位移关系,体重在50~80 kg的比例为82%,其位移位于17.6~33.0 mm间。最大人员位移44.6 mm, 其中112 kg乘坐人员位移约41 mm, 与计算机优化后仿真数据39 mm吻合较好,低于产品设计的最大位移90 mm。随着体重的增加,吊臂末端位移也逐步增加,在体重允许范围中,产品处于安全使用状态,为产品临床试验应用提供可靠数据。

图8 试验人员体重和吊臂末端位移图
Fig8Testpersonnelweightandboomtipdisplacement
为和市场上现有移位机对比研究,我们查询了常州某两家著名康复设备公司型号DP-YBQ、W-YBQ-02搬运器,并联系其售后对其试验数据做了调查。其中DP-YBQ型质量为45 kg, 乘坐人员质量最大为135 kg,安全范围内不同质量人员乘坐末端位移在15~48 mm之间。对比可知,本设计针对人员质量正态分布范畴,降低了总机的质量,使用更加方便,同时满足了设备安全使用的要求。
6 结束语
通过计算机技术在患者康复移位机三维建模和灵敏度优化分析中的应用,研制出了较方便的移位机模型和乘坐需用的产品样机,满足不同患者的需要,可减少患者康复时间,利于此类康复设备向家庭市场推广。得出主要结论如下:
(1)计算机辅助技术在康复设备的研发中能发挥越来越重要作用,并与临床康复应用相辅相成,为临床的研究提供数据保障。
(2)计算机应用领域在医学中的拓展使得康复设备研究更加家庭化、智能化、便携化、市场化进程,利于我国国民大健康事业的发展。
(3)计算机技术的发展与为医学相关但不便进行人体或动物体领域的仿真研究提供了便利,使一些高难度的医学工程中的问题能够以仿真形式结果出现,为临床提供帮助。