冗余驱动并联机构的驱动力同步协调控制
2018-10-18刘晓飞姚建涛赵永生
刘晓飞,姚建涛,赵永生+
(1.燕山大学 先进锻压成形技术与科学教育部重点实验室,河北 秦皇岛 066004;2.燕山大学 河北省并联机器人与机电系统实验室,河北 秦皇岛 066004)
0 引言
冗余驱动并联机构与传统非冗余驱动并联机构的区别在于,其驱动数目大于机构自由度数目。冗余驱动可以降低传统并联机构的奇异位形,增加有效工作空间[1-3],并改善机构动力学特性[4-6]。此外,通过优化驱动力分配,冗余驱动可以有效提高刚度、增加承载力[7-8]、消除关节间隙[8-10]等。
虽然冗余驱动并联机构具有很多优点,但要充分发挥这些优势,还要依赖于控制方法的实现。对于冗余驱动并联机构的控制问题,国内外相关研究较多。Ganovski等[11]基于分段控制的方法对平面冗余驱动并联机构进行了控制,并采用计算力矩方法,基于机构动平台的加速度反馈设计了闭环控制器。Chakarove[12]基于冗余驱动并联机构的刚度模型,提出一种刚度控制策略,可以实现冗余驱动并联机构特定方向上的柔度控制。李泽湘等[13]针对平面3自由度冗余驱动并联机构的控制问题,引入串联机构的控制方法,包括关节空间比例微分(PD)控制、增广PD控制、广义坐标PD控制和计算力矩控制,并对这4种控制方法进行了对比分析。丛爽等[14-16]针对平面2自由度冗余驱动并联机构设计了自适应计算力矩控制、工作空间协调运动控制和鲁棒非线性控制3种控制方法。刘辛军等[17-18]采用滑模控制方法对平面3自由度冗余驱动机构进行了控制。Müller等[19]提出一种基于冗余坐标系计算力矩控制和增广PD控制策略。Lamaury等[20]基于关节空间的双环反馈对6自由度的冗余驱动绳索机构进行了控制。Bennehar等[21]将自适应反馈、PD反馈和补偿算法相结合,设计了修正补偿自适应控制算法。陈五一等[22]基于鲁棒轨迹跟踪控制模型和目标阻抗控制模型实现了冗余驱动并联机构的柔顺性控制。由于冗余驱动并联机构的驱动数目大于机构自由度,只需选择适当数量的驱动关节用于控制机构运动轨迹,其他驱动关节可以用于调整机构受力状态等。吴军等[23-24]针对平面3自由度冗余驱动机构提出了力位混合驱动的控制方法,并设计了动力学补偿器[25]来提高位置控制精度。赵永生等[26]采用力位混合控制策略实现5自由度冗余驱动机构的位置控制与驱动力调节。现有方法都是基于机构动力学模型,通过各种智能算法实现对驱动力的实时调整。然而这些方法都是对各关节驱动力分别进行控制的,并没有考虑冗余驱动机构驱动力间的协调约束关系。对于多驱动间的同步协调控制[27],目前主要集中于轨迹跟踪控制,暂未涉及驱动力间的同步协调控制。
本文针对冗余驱动并联机构的驱动协调性问题,提出一种基于模型的驱动力同步协调控制方法。以6PUS+UPU冗余驱动并联机构为对象,推导了机构动力学模型,并分析了机构在预定运动轨迹下的驱动力调节机理;在力位混合驱动模式的基础上,提出一种驱动力同步协调控制策略,并设计了协调控制算法;利用软件仿真与样机实验分别对所提出的控制方法进行了验证。本文所提出的控制方法为冗余驱动并联机构的控制应用提供了新的思路。
1 并联机构6PUS+UPU简介
冗余驱动并联机构6PUS+UPU的结构简图如图1所示。PUS分支由滑块与定长连杆组成,滑块由伺服电机驱动并沿导轨作垂直于水平面的上下移动,定长连杆通过球铰与动平台连接,滑块与连杆间通过虎克铰连接。UPU分支包含两个由P副连接的定长连杆,两个连杆均通过虎克铰分别与机架和动平台相连接。基于文献[28]的分析,UPU分支限制了动平台1个自由度的转动,且PUS分支提供的6个驱动线性无关,因此该机构为冗余驱动并联机构,其自由度为5,冗余度(指机构驱动数目超过机构自由度的数目)为1。
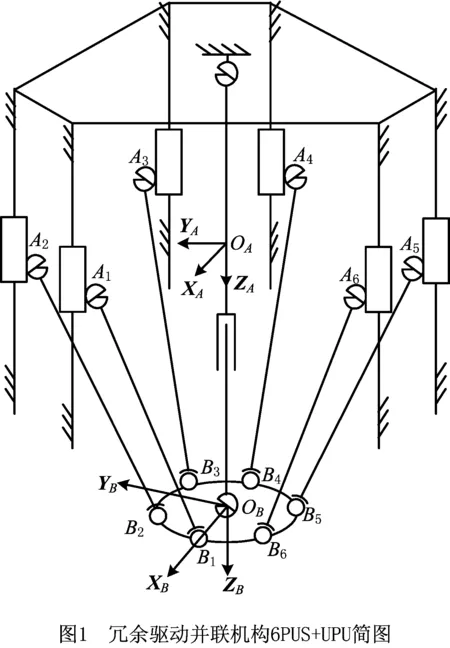
机构动平台在空间中的位置向量可以表示为p=[x,y,z]T,而姿态矩阵可以表示为R=R(x,α)·R(y,β)·R(z,γ),因此动平台在空间中的位姿可用由6个位姿参数组成的广义坐标q=[x,y,z,α,β,γ]T表述。对于5自由度并联机构6PUS+UPU而言,广义坐标的6个参数中只有5个是独立的,取qs=[x,y,z,α,β]T,记为独立广义坐标。采用广义坐标表示的机构速度与加速度向量中6个参数为非独立变量,可以通过约束关系将其转换为独立广义坐标下的独立变量。广义速度与独立广义速度间的约束关系可用式(1)表示,广义加速度与独立广义加速度间的约束关系可用式(2)表示。
(1)
(2)
2 冗余驱动并联机构动力学建模
研究冗余驱动并联机构的驱动力协调问题需要建立机构的动力学模型。目前建立并联机构动力学模型的方法主要以Newton-Euler法、Lagrange法、虚功原理法以及螺旋理论法等[29-34]为主。从理论上说,这些方法得到的驱动力计算结果是一样的[35]。本文在文献[36-37]运动学分析的基础上,采用虚功原理法对6PUS+UPU机构的动力学模型进行推导,推导过程忽略关节摩擦力的影响。
2.1 冗余驱动机构的驱动力分配
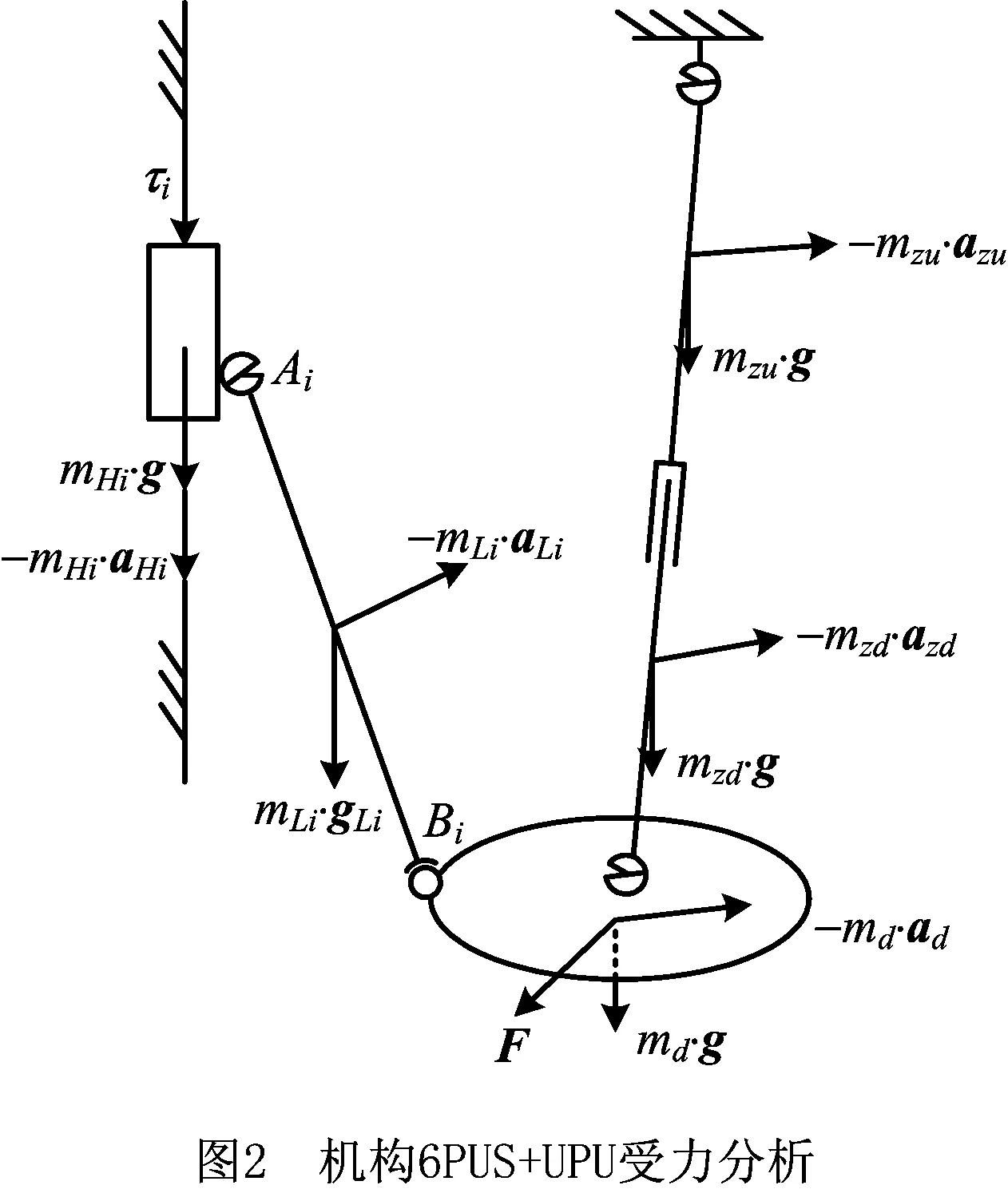
机构在运动过程中主要受重力、惯性力以及外负载等影响,建立机构的受力平衡方程,可以获得机构的动力学模型,并对机构的驱动力进行求解。冗余驱动并联机构6PUS+UPU的受力分析如图2所示,其中τi∈R6×1为驱动分支滑块所受驱动力,g∈R6×1为重力加速度,ai∈R6×1为各构件广义加速度(包含移动加速度与转动加速度),-mHi·aHi、-mLi·aLi、-mzu·azu、-mzd·azd和-md·ad分别表示滑块、驱动分支连杆、约束分支上下连杆和动平台所受广义惯性力,mHi·g、mLi·g、mzu·g、mzd·g和md·g分别表示这些构件所受重力,F∈R6×1表示动平台所受外力负载。
在笛卡尔坐标系下,假定机构动平台的广义运动速度(包括线速度与角速度)为υd∈R6×1,中间约束分支上下连杆的广义运动速度分别为υzu∈R6×1和υzd∈R6×1,连杆AiBi的广义运动速度为υLi∈R6×1,滑块的广义运动速度为υHi∈R6×1,这些构件在广义坐标系q下的速度雅可比矩阵分别为Jd∈R6×6、Jzu∈R6×6、Jzd∈R6×6、JLi∈R6×6和JHi∈R6×6,则可得:
(3)
对6PUS+UPU并联机构而言,各驱动关节均为单自由度关节,因此其驱动关节的驱动力可以简化为标量。记各驱动分支P副的单位方向向量为ni∈R6×1,滑块所受驱动力的幅值为τi∈R,可得:
(4)
基于虚功原理,机构承受的所有外力的作用,经过虚位移所作的虚功,总和等于零。建立6PUS+UPU并联机构的虚功平衡方程,即:
(5)
将式(3)和式(4)代入式(5),可整理得:
(6)
通过参数分离,可以将机构各运动构件在广义坐标q下的广义惯性力分解为:
(7)
则式(6)可进一步整理得到:
(8)
式中:

(JH·G)T·τH=GT·
(9)

(10)
式中(JH·G)+T为矩阵(JH·G)T的广义伪逆,则式(10)所获得的驱动力解为最小二范数解。
2.2 预定轨迹下的驱动力调节

式(8)可改变为:
(11)
进一步整理可得:
(12)

(13)
式(13)为满足预定轨迹与负载情况下冗余驱动并联机构冗余驱动力与非冗余驱动力间的约束关系,通过改变冗余驱动力,实现对非冗余驱动力的调节。
(14)
进一步可以获得:
(15)
式(15)即为6PUS+UPU机构冗余驱动力改变量与非冗余驱动力调节量间的映射关系。可以看出,该映射关系只与机构驱动关节速度雅可比矩阵JN和Jh6以及动平台运动约束G有关。
若只考虑冗余驱动关节对某一特定非冗余驱动关节驱动力的调节,可以将式(15)进行分离,得到如下等式:
i=1,2,…,5。
(16)
式中[(JN·G)-T·GT·Jh6]i∈R表示向量[(JN·G)-T·GT·Jh6]∈R5×1的第i个元素。因此,可以获得冗余驱动力对驱动关节i的驱动力调节比率,即
i=1,2,…,5。
(17)
在实际应用中,可以基于式(17)的计算结果,根据非冗余驱动关节驱动力所需要的调节量,计算冗余驱动关节驱动力的改变量。
3 冗余驱动机构的驱动力同步控制
3.1 冗余驱动机构的力位混合驱动
区别于传统并联机构,冗余驱动并联机构各驱动关节要求具有较高的协调性。对冗余度为1的5自由度冗余驱动并联机构而言,可以采用力位混合驱动的方式,即5个关节的位置驱动和1个关节的力/力矩驱动,如图3所示。通过位置驱动关节来控制机构动平台的运动轨迹,通过力驱动关节来调节机构的受力状态,文献[23,26]证明了该控制方法的有效性。在机构动平台轨迹规划的基础上,通过机构逆运动学计算非冗余驱动关节的轨迹输入,通过逆动力学计算冗余驱动关节的驱动力输入,然后通过驱动系统实现对冗余驱动机构运动位置与受力状态的混合控制。
位置驱动关节的控制规律基于关节轨迹误差反馈,其关节驱动力受机构受力状态的影响;力/力矩驱动关节则可以主动改变关节驱动力或力矩的输入。因此,采用力位混合驱动模式可以在控制机构运动轨迹的同时,主动调节机构的驱动力输入,进而实现对机构驱动力的优化分配,优化机构受力状态。

3.2 驱动力同步协调控制
处于力位混合驱动模式下的冗余驱动并联机构,理论上既可以实现机构的运动控制,又可以实现驱动力的优化分配。然而,由于模型的不精确性,以及不可避免的控制误差,冗余驱动机构各驱动关节间的同步协调性无法保证。较低的驱动协调性容易降低机构精度与力学性能,引起较大的机构内力,甚至造成机构关键零部件的过度磨损与破坏。
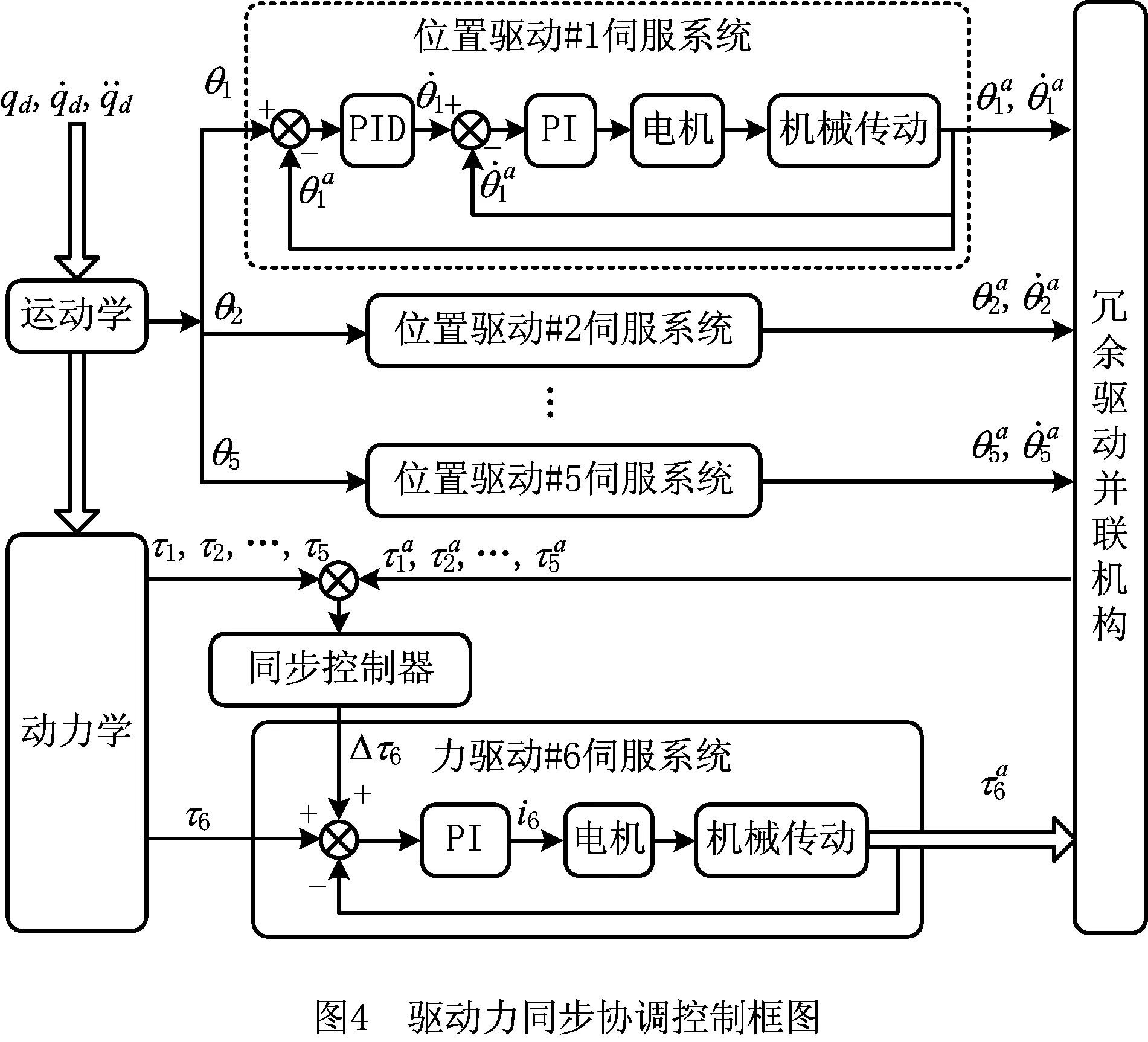
在驱动力调节比率已知的情况下,可以设计同步控制器,根据位置驱动关节驱动力误差来调整力驱动关节驱动力输入,进而提高冗余驱动机构各驱动关节间的驱动协调性。6PUS+UPU冗余驱动机构的驱动力同步控制策略如图4所示。
(18)
记基于冗余驱动对非冗余驱动力的调节比率,可以计算冗余驱动力τ6的实时调节量,则
(19)
式中λi为各位置驱动关节驱动力误差计算权重,可根据控制系统的实际控制精度进行调整。
4 仿真验证
本章以冗余驱动并联机构6PUS+UPU为对象,通过建立混合仿真模型,验证上述控制方法的有效性。利用MATLAB软件的Simulink建立控制系统的仿真模型,利用Adams建立机构的动力学仿真模型(如图5),将两者结合,建立包含机构本体与控制系统的机电一体化系统仿真模型,进而可以对控制系统的相关性能进行分析。并联机构6PUS+UPU相关几何参数如表1所示,相关的惯性参数如表2所示。

表1 6PUS+UPU机构几何参数
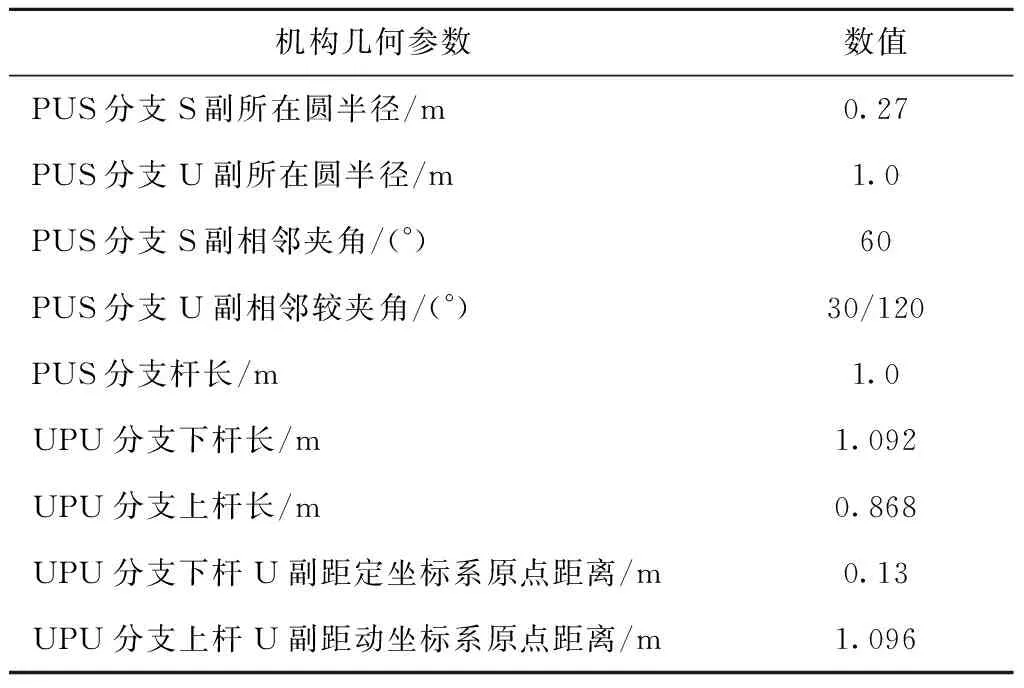
机构几何参数数值PUS分支S副所在圆半径/m0.27PUS分支U副所在圆半径/m1.0PUS分支S副相邻夹角/(°)60PUS分支U副相邻较夹角/(°)30/120PUS分支杆长/m1.0UPU分支下杆长/m1.092UPU分支上杆长/m0.868UPU分支下杆U副距定坐标系原点距离/m0.13UPU分支上杆U副距动坐标系原点距离/m1.096
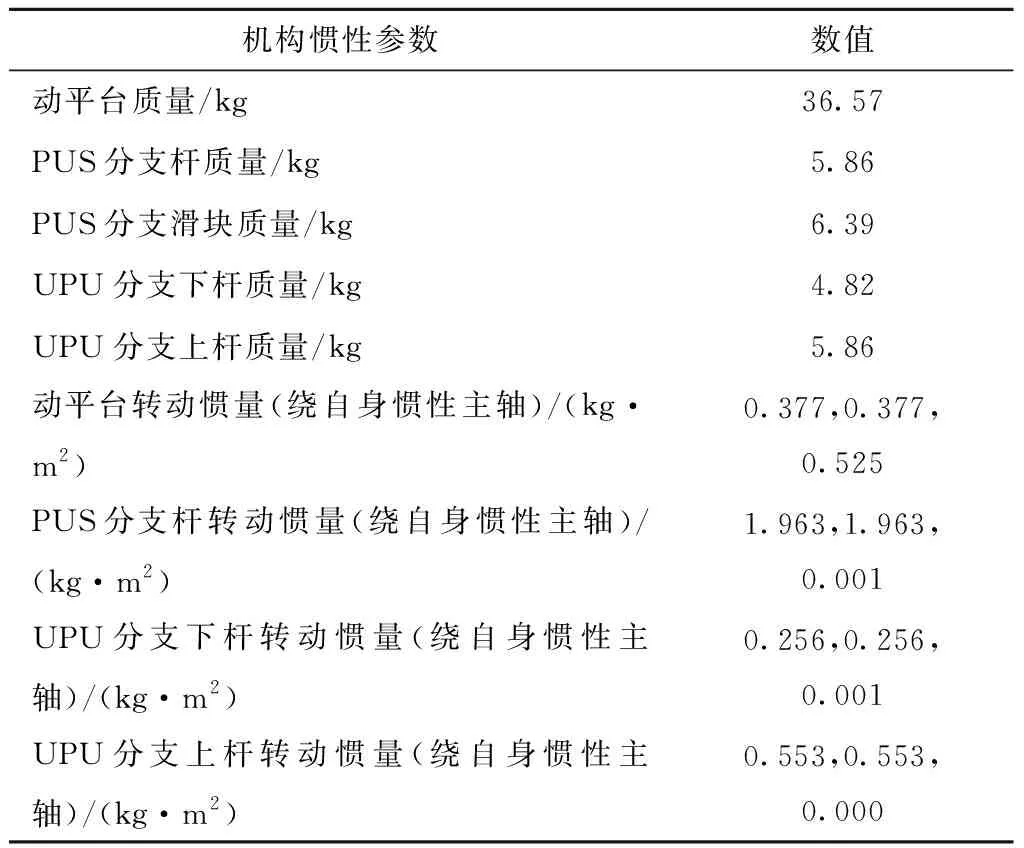
表2 6PUS+UPU机构惯性参数
仿真过程中,动平台沿初始位姿所在平面作圆周运动,圆周半径为100 mm,圆心为动坐标系原点OB,运动完一周的时间为15 s,运动过程中动平台姿态不发生改变。基于文献[28]的分析,当机构动平台不发生绕水平轴线的转动时,UPU分支施加给动平台的约束为绕自身法线的转动,因此上述运动轨迹中不存在奇异位姿。
基于运动学计算#1~#5分支滑块的期望运动轨迹,并由位置驱动系统控制滑块的实际运动;基于动力学计算#6分支滑块所需要的期望驱动力,并由力驱动系统控制滑块的驱动力输入。分别采用传统的力位混合驱动和驱动力同步协调控制两种方法对模型进行控制,记录运动过程中伺服驱动系统实际施加于各驱动分支滑块上的驱动力。基于最小二乘法计算冗余驱动并联机构6PUS+UPU的期望驱动力优化分配,其结果如图6所示;采用传统力位混合驱动方法的伺服系统施加于滑块的实际驱动力如图7所示,其与期望驱动力间的偏差如图8所示;采用力位混合同步协调控制方法的伺服系统施加于滑块的实际驱动力如图9所示,其与期望驱动力间的偏差如图10所示。
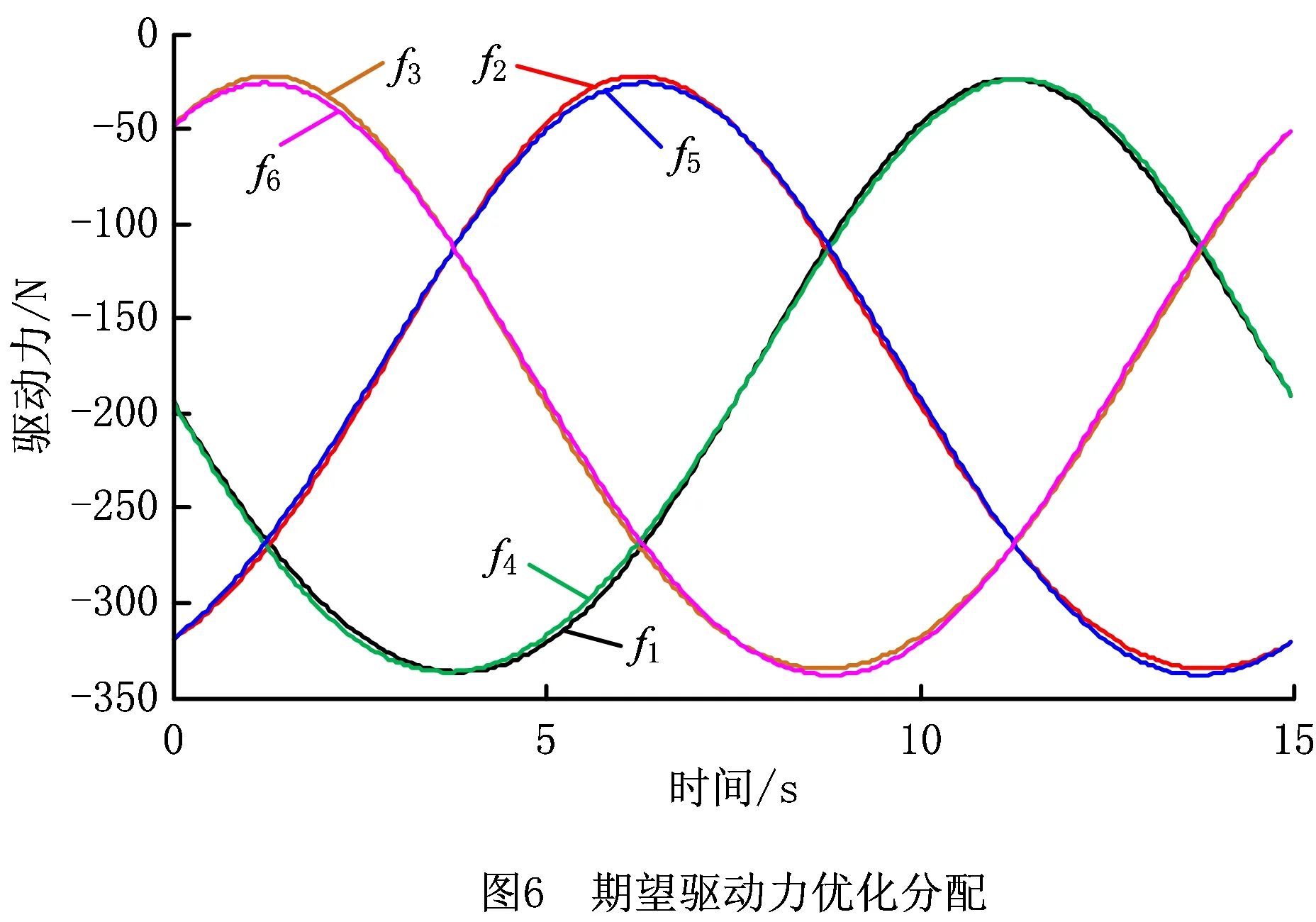



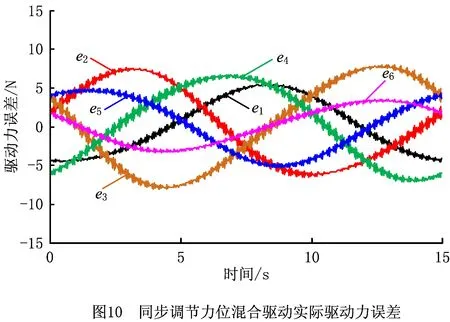
对比图6、图7和图9可以发现,在力位混合驱动模式下,驱动系统施加于各分支滑块的实际驱动力与期望驱动力基本相同,但仍然存在一定偏差,说明该控制方式对冗余驱动并联机构而言确实是一种有效的控制方式,但控制精度有待进一步提高。对比图8和图10可以发现,较传统力位混合驱动方式而言,驱动力同步协调控制方式下的位置驱动关节驱动力误差明显减小,力驱动关节的驱动力误差有所增大,但各驱动分支间的驱动力误差较均匀,且整体变化范围小于传统力位混合驱动模式下的驱动力误差。这说明驱动力同步协调控制可以有效提高各驱动关节间的驱动协调性。
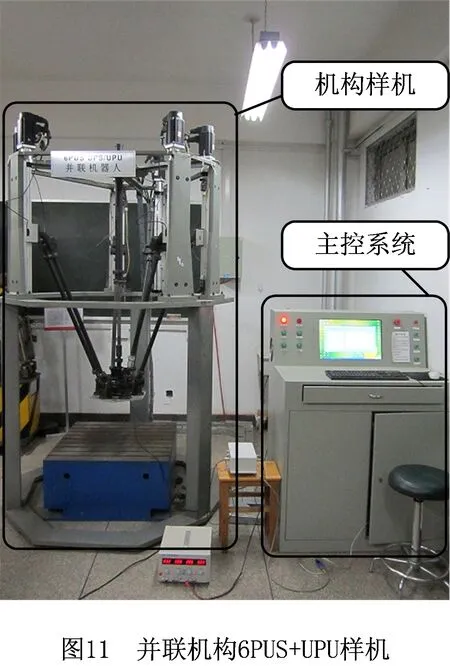
5 样机实验
冗余驱动并联机构6PUS+UPU的样机如图11所示,其相关几何参数和惯性参数如表1与表2所示。实验过程中,样机完成与上节仿真过程中相同的运动轨迹,并分别采用传统的力位混合驱动和驱动力同步协调控制两种方法对并联机构进行控制,记录运动过程中伺服驱动系统实际施加于各驱动分支滑块上的驱动力,并计算其与期望驱动力间的误差。采用传统力位混合驱动方式下样机的实际驱动力如图12所示,采用驱动力同步协调控制方式下的实际驱动力如图13所示。图14表示两种控制模式下各分支实际驱动力与期望驱动力间的最大误差,包括正向误差与负向误差;图15表示两种控制模式下实际驱动力与期望驱动力间的平均误差,包括正向误差与负向误差。


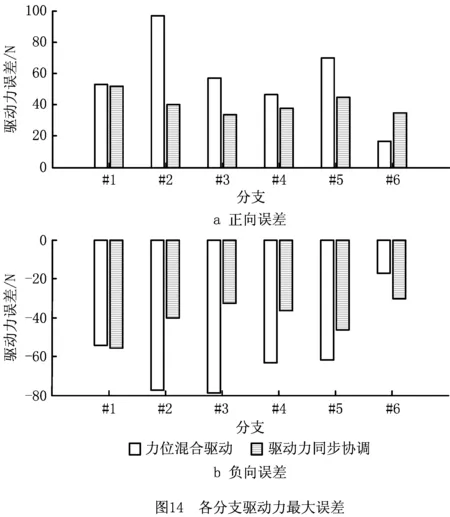
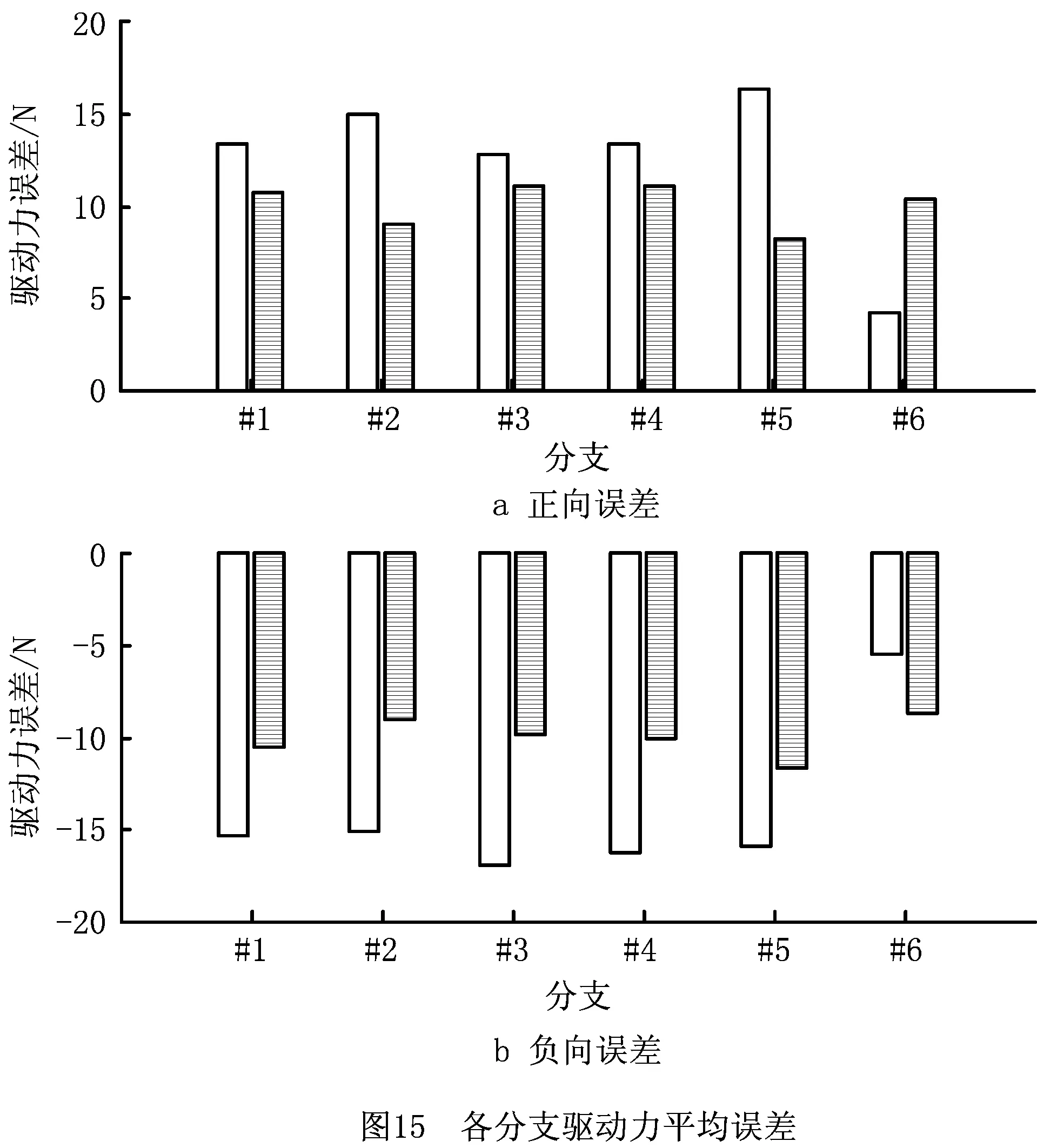
对比图6、图12和图13可以发现,较传统力位混合驱动模式而言,驱动力同步协调控制下的各分支实际驱动力波动较小,说明该方法下控制系统更加稳定。分析图14和图15可知,较传统力位混合驱动方式而言,驱动力同步协调控制方式下的位置驱动关节驱动力误差明显减小,而力驱动关节的驱动力误差有所增大,但各驱动分支间的驱动力误差较均匀,且整体变化范围小于传统力位混合驱动模式下的驱动力误差。说明力位混合同步协调控制方式可以有效提高各驱动分支间的驱动协调性。进一步分析图14可知,较分支驱动力幅值而言,力位驱动模式下各分支驱动力的最大误差较显著,结合图12可知,各分支驱动力在特定位置出现了较大波动。这是由于该模式下各分支驱动相对独立,由模型不精确性以及控制误差等原因导致了各分支驱动间的不协调性。对于冗余驱动并联机构而言,其对分支间驱动协调性的敏感度较高,较低的驱动不协调性也会导致分支驱动力的较大波动。进一步分析图14和图15可知,在分支#1-#5驱动力误差减少的同时,分支#6的驱动力误差有所增大。结合图4分析可知,驱动力同步协调控制是通过对#6分支引入驱动力调整量来实现对#1-#5分支驱动力的调整。因此,在忽略其他因素影响的前提下,驱动力同步协调控制模式必然会导致力驱动分支实际驱动力与期望驱动力间偏差的增大,但该控制模式有效增加了各分支间驱动协调性,提高了冗余驱动机构驱动力整体控制精度。
6 结束语
本文针对冗余驱动并联机构的驱动协调性问题,以6PUS+UPU并联机构为对象,分析了冗余驱动机构驱动力协调机理,提出了一种基于模型的驱动力同步协调控制方法。
首先基于虚功原理推导了冗余驱动并联机构6PUS+UPU的动力学模型,分析了机构驱动力间的协调约束关系;然后结合驱动力协调约束关系,在力位混合驱动的基础上,提出了驱动力同步协调控制策略,并设计了协调控制算法;分别采用了传统力位混合驱动与本文所提出的驱动力同步协调控制两种方法,对6PUS+UPU机构动力学仿真模型和样机进行控制,并对控制结果进行了对比分析。分析结果显示本文所提出的驱动力协调控制方法能够有效改善冗余驱动并联机构的驱动协调性。
本文所提出的驱动力同步协调控制方法为冗余驱动并联机构的控制与应用提供了新的思路和新的方法。对于在驱动协调模式下如何进一步提高各分支驱动力控制精度,将在后续研究中进行分析。
