异质相依群体系统的协同一致性追踪
2018-10-18裴惠琴陈世明赖强陈谦
裴惠琴 陈世明 赖强 陈谦
群体系统是由大量具有动态演化特征的个体通过局部感知和相互作用形成的一类复杂开放的分布式系统.一般而言,通过局部信息交互和控制器的设计实现群体系统整体层面上复杂而有序的协同行为.近年来,报道了关于群体系统分布式协同控制(例如一致性和一致性追踪)方面的大量研究成果[1−9].这方面的研究已经取得了一定的进展,归因于各领域广泛的应用,例如自动高速公路系统的调度、无人航天器和无人水下机器人的协同控制[10−11]、卫星编队控制以及移动机器人的分布式最优化控制[12−13]等.
根据个体性质或功能的相同与否,群体系统可划分为同质群体系统和异质群体系统.同质群体系统的研究已经取得了大量研究成果,并且广泛得以应用.客观地来说,自然界和工程系统中群体的异质性广泛存在,例如在人类社交群体中,每个个体具有不同的性别、职业、爱好、价值观等;在军演群体中,海、陆、空不同性能和类型军事装备协同作战.Johnson等[14]通过实验和仿真研究了存在大量参数不匹配的驱动系统和响应系统,发现仅通过标量信号的耦合作用,就能使这两个异质的系统实现较为理想的同步效果.在此基础上,针对具有不同动力学特性的异质群体系统,国内外学者从多个角度展开了相关的研究工作[15−18].Zheng等[18]采用状态变换法提出了一种新颖的协议实现异质群体系统的群一致性.Liu等[19]构建了两种固定的一致性算法用于研究由一阶智能体和二阶智能体组成的离散时间异质群体系统的一致性.基于线性二次型调节器理论,Ma等[20]研究了具有最优拓扑的连续时间和离散时间群体系统的领导–跟随者一致性.Hu等[21]针对合作–竞争网络中异质群体的二阶一致性问题,提出了一种混杂自适应的牵制控制策略.Liu等[22]提出了一种新颖的一致性算法能够保证具有有向拓扑的异质群体系统一致性的实现.Sun等[23]基于智能体的输出反馈信息,利用一种分布式自适应一致性追踪协议研究了具有有向拓扑结构和未知动力学的异质群体系统的一致性.Yang等[24]研究了具有切换有向拓扑的一类异质群体系统的分布式自适应输出一致性控制.Wen等[25]为了实现异质群体系统的群一致性,提出了一类分布式群一致性协议,并给出了相关定理的证明分析.Zhou等[26]利用高阶有限时间一致性协议研究了异质群体的一致性.Feng等[27]研究了有向通信图中,一阶智能体和二阶智能体的一致性.Zhu等[28]提出了一种新颖的连续非线性分布式一致性协议用于实现异质群体系统的有限时间一致性.
从上述讨论分析可知,目前大部分研究工作主要是初步地关注异质群体系统的一致性.异质群体系统一致追踪方面的研究工作尚未完全展开,这方面的研究成果相对较少.Rahimi等[10]研究了由无人机群和地面无人车辆组成的异质系统的时变队形控制问题,设计了一种基于李雅普诺夫理论的分布式控制器,驱动群体实现蜂拥的同时可以进行实时队形控制.但是忽略了无人机系统与无人车辆系统之间的演化协同关系.对于异质群体系统而言,子群体都是以一种或者多种方式相互依存的,它们之间存在相依性,而且这种相依性对于整个群体系统控制效率有重要影响.一般而言,异质群体系统中不同个体之间的相依方式可分为一对一、一对多和多对多的方式,相依关系既是一种契机,也是导致系统脆弱性并影响系统结构鲁棒性的关键所在[29].本文通过上述已有研究工作分析的启发,研究带有固定通信拓扑的异质相依群体系统的一致性追踪问题,该群体系统由一阶子群体和二阶子群体组成.本文的主要贡献是:1)从个体性质不同或子群体拓扑结构不同的角度出发,构建异质群体系统的相依模型;2)对于不同的子群体,分别提出相应的分布式一致性追踪控制协议,同时给出保证一致性追踪实现的充分条件;3)定义了衡量子群体间相依程度的相依比例值参数.
本文结构如下:第1节是异质相依群体系统协同一致性的问题描述;第2节是主要研究结果的具体阐述,包括异质群体系统的相依模型,提出了一类分布式一致性追踪控制协议,给出了定理和相关的证明以及相依比例参数;第3节通过仿真实例分析进一步评价理论结果的有效性和可行性;第4节对本文内容进行总结.
1 问题描述
群体系统中,个体之间的信息交换描述为交互图G=(V,E,A),其中V=(v1,v2,···,vn)是非空顶点集;E⊆V×V是边集;A=[aij]∈Rn×n是具有元素aij的加权矩阵,如果(vi,vj)/∈E,那么aij=0,否则aij>0.边eij=(vi,vj)∈E表示点vj可以接收来自点vi的信息.若aij=aji,该图称为无向图,反之称为有向图.对角度矩阵D∈Rn×n定义为D=diag{d},其中. 拉普拉斯矩阵定义为,即L=D,其中,并且.
引理1[30].假设, 且xi∈R.于是系统能够实现渐近一致性的条件是当且仅当图Gn有一棵有向生成树,其中Gn是n个智能体的通信拓扑结构图,并且Ln是图Gn的Laplacian矩阵.对于∀t≥0,e−Lnt是具有正对角线元素的随机矩阵.Gn具有有向生成树的充分必要条件是rank(Ln)=n−1.这种情况下,存在非负的列向量γ ∈Rn,使得当t→∞时,,其中,并且.
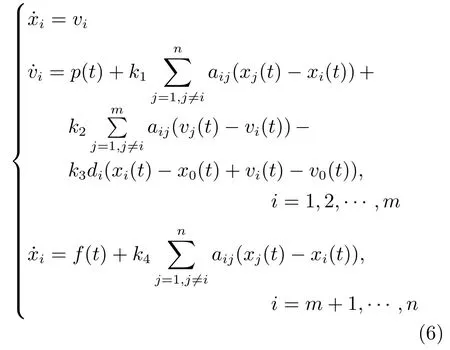
假设异质群体系统由b≥2个子群体组成,整个群体系统可描述为{P,E},其中P={P1,···,Pi,···,Pb},E={E1,1,···,Ei,j,···,Eb,b}. 其中,Pi表示子群体i的个体集合,Ei,i表示子群体i的边集合,即子群体的内部连接.当i̸=j时,Ei,j表示子群体i和子群体j之间的边集合,即子群体的外部连接.不失一般性,考虑具有两个子群体的异质群体系统,由m个二阶动力学个体和n−m个一阶动力学个体组成.二阶个体的动力学方程如下:

其中,xi,vi∈RN分别表示个体i的位置状态和速度状态,ui∈RN是控制输入,p(t)是自身动态函数.一阶个体的动力学方程如下:

其中,xi,ui∈RN分别表示个体i的位置状态和控制输入,f(t)是自身动态函数.此外,目标个体的动力学方程为

其中,x0,v0∈RN分别表示个体i的位置状态和速度状态,p(t)是自身动态函数.为了便于分析,假设群体系统中所有个体是在一维空间中,即xi,vi,ui∈R.但是,通过Kronecker积,本文研究所得结果都可以扩展应用到N维空间之中.
对应于整个群体的二阶动力学个体和一阶动力学个体的划分,邻接矩阵A为

其中,Af∈R(n−m)×(n−m),As∈Rm×m. 二阶个体的Laplacian矩阵定义为Ls=Ds−As,Ds是仅考虑二阶个体的入度对角矩阵.类似地,Lf=Df−Af是一阶个体的Laplacian矩阵.对于个体i,Ni,s定义为它的具有二阶动力学的邻居个体集合,Ni,f定义为它的具有一阶动力学的邻居个体集合.根据这些构造和定义,整个群体拓扑图的Laplacian矩阵可描述为

其中,
定义1.对于任意初始状态xi(0),x0(0)和vi(0),v0(0),异质相依群体系统能够实现一致性追踪.若
2 主要研究结果
2.1 相依模型与参数
定义2.考虑外部连接(s,z)∈Ei,j,其中s∈Pi,z∈Pj,且,s称为z的相依个体,反之亦然.在子群体i中,将没有任何相依个体的个体称为独立个体.
定义3.异质群体中相依个体之间存在一种关系,彼此相互依赖、互相产生作用,并且个体可以独立的发挥它自身的功能并存在,这种关系称为相依性.
定义4.由若干个具有不同动力学性质以及拓扑结构不同的子群体构成异质群体网络拓扑图,并且子群体之间存在相依性,这种拓扑图称为异质群体的相依模型.
如图1(a)和1(b)所示,展示了两种异质群体系统的相依模型,这些群体系统是由不同性质和不同拓扑结构的子群体所构成.异质群体的相依模型可以清楚地描述子群体之间的相依性,图中平面内实线代表子群体的内部连接线,即子群体中个体之间的通信关系,虚线代表子群体的外部连接线,即子群体之间的相依关系.在本文中,我们考虑由两个子群体构成的异质群体系统的模型,如图1(a)所示.
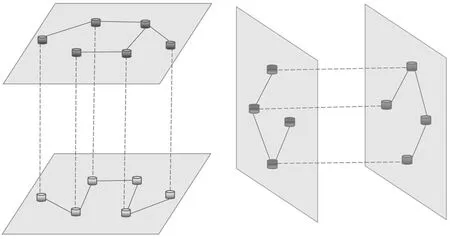
图1 异质群体系统的相依模型示意图Fig.1 Interdependent models of heterogeneous group systems
为了研究异质群体系统一致性追踪中不同相依程度对其影响,引入参数Pr表示相依比例.Pr包括Pri和Prj,其中Pri代表子群体i中相依个体数占子群体i所有个体数的比例值,Prj代表子群体j中相依个体数占子群体j所有个体数的比例值.

其中,#{U}表示U集合的基数,Numi和Numj分别表示子群体i和子群体j的个体总数目.
2.2 异质相依群体系统的一致性追踪
基于第2.1节异质群体系统相依模型的构建,讨论由一阶动力学个体和二阶动力学个体组成的异质相依群体系统的一致追踪.考虑异质相依群体系统(1)和(2),提出一类分布式追踪一致性控制协议,其描述为


且

其中,k1>0,k2>0分别是位置和速度的耦合系数,k3>0,k4>0是反馈控制系数.aij是邻接矩阵A∈Rn×n的第(i,j)个元素,di是局部度矩阵B∈Rm×m的第(i,i)个元素.于是,异质相依群体系统可以描述为
令ξi(t)=xi(t)−x0(t),i=1,2,···,n,ηi(t)=vi(t)−v0(t),i=1,2,···,m,且ξ1=[ξ1,ξ2,...,ξm]T,η=[η1,η2,...,ηm]T,ξ2=[ξm+1,ξm+2,...,ξn]T.
由式(6)可知

上述误差系统可改写为
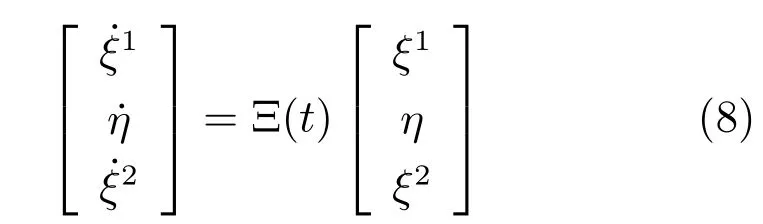
其中,
根据定义1,当t→∞时,有

表明异质相依群体系统能够实现一致追踪.
定理1.假设固定通信拓扑图G包含一棵有向生成树,即群体系统中任意个体至少能够通过某一邻居个体获得通信信息,那么固定通信拓扑情况下,异质群体系统(1)和(2)通过分布式控制协议式(4)和(5)能够实现群体一致性追踪的充分条件是

其中,k1>0是位置耦合系数,k2>0是速度耦合系数,k3>0是反馈控制系数.
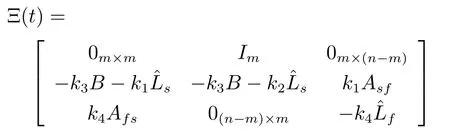
证明.误差系统(8)可改写为

式中,

为了便于分析,给出下面的转换式

令y=[y1,y2,···,ym]T,误差系统(9)改写为
其中,


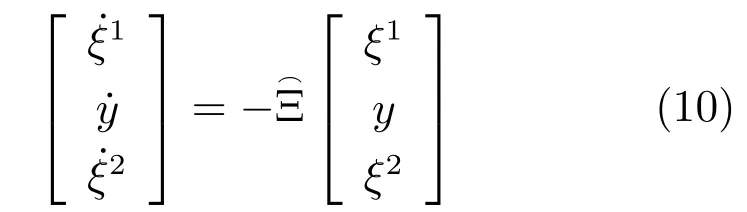
将式(11)中第1行元素的−k2/k1[(k1/k2−k3)B+k2Dsf]倍加到第2行,并且第1行元素的(k2k4)/k1Afs倍加到第3行,有
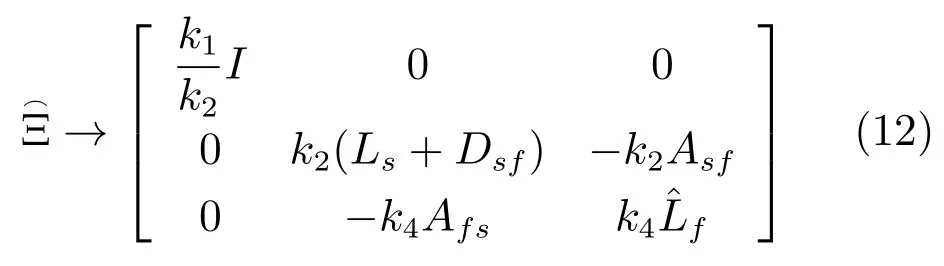
将式(12)第1~3行分别乘以k2/k1,1/k2,1/k4,可得

3 仿真实例分析
前面我们建立了异质群体系统的相依模型,并设计了一类分布式一致性追踪控制协议以实现异质相依群体系统的一致性追踪,给出了相关定理和分析证明以及相依比例参数.本节中,提供仿真实例进一步说明理论结果的有效性和可行性.
实例1.考虑由二阶个体1,2,3和一阶个体4,5,6构成的异质相依群体系统,该系统的通信拓扑图具有一棵生成树,如图2所示.从图2可知,整个群体系统由子群体GI和子群体GII组成,并且P1={1,2,3},P2={4,5,6},其中个体1,3,4,5是相依个体,个体2,6是独立个体,并且E14,E35是子群体的两条外部连接边.子群体GI和子群体GII的相依比例值分别为PrI=2/3,PrII=2/3.

图2 异质相依群体系统的固定无向拓扑图Fig.2 Fixed undirected topology of the heterogeneous interdependent group system
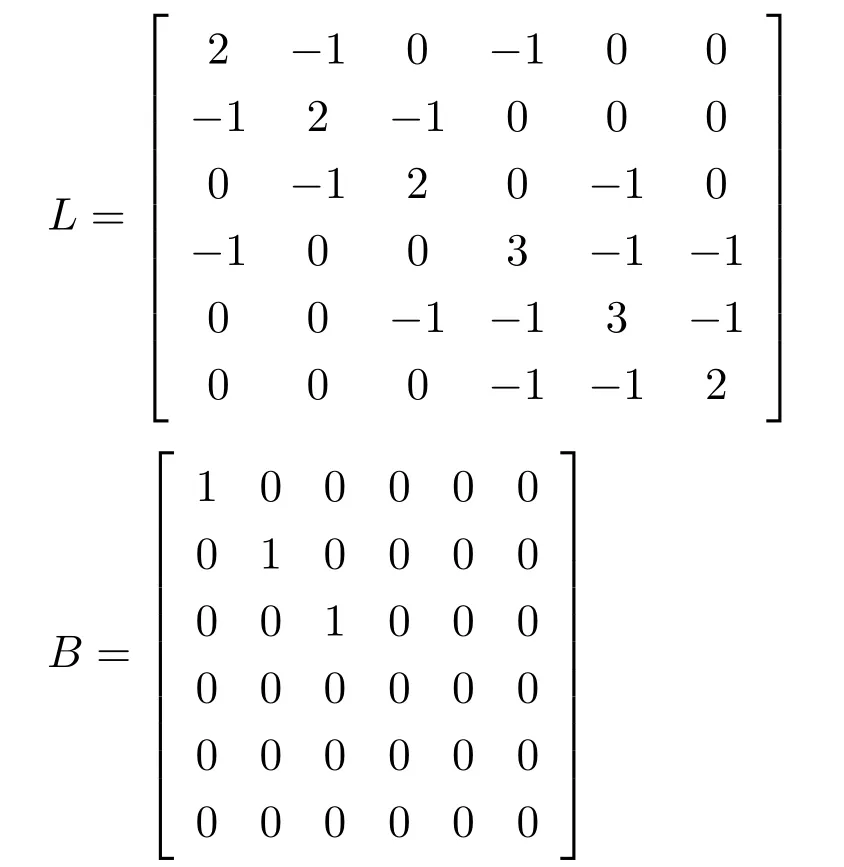
目标个体的加速度为p(t)=0.1t2sin(8t),且f(t)=∫p(t)dt.对于如图2所示的群体拓扑图,相应Laplacian矩阵和局部度矩阵分别为
任取参数k1,k2,k3,使其满足定理1的充分条件,即
这里,取参数k1=1,k2=1,k3=9,k4=1,所有个体的初始状态取值为
从仿真结果图3可知,通过控制协议式(4)和式(5),异质相依群体系统的一致性追踪能够渐近地实现.图3(a)是目标个体的速度信号曲线.由图3(b)和3(d)可知,二阶个体1,2,3的速度经过一段时间之后逐渐地趋近于相同的数值,并且完全跟踪上了目标个体的速度信号.从图3(c)结果分析,当时间t=11.5s时,所有个体的位置状态与目标个体的位置状态之间绝对误差基本为零,换句话而言,无论是一阶个体还是二阶个体最终追踪到目标个体,并且聚合在一起继续往前运动.
当子群体增加一条外部连接边E26,相依个体比例值Pr增大,也就是子群体之间相依程度更为紧密.此时,群体拓扑图对应的Laplacian矩阵和局部度矩阵分别为


图3 个体的位置状态追踪误差和速度示意图Fig.3 Position state tracking errors and velocities of individuals
子群体的相依比例值分别为PrI=1,PrII=1.从图4(a)和4(b)结果分析可知,经过一定时间(t=8.8s),所有个体的位置状态与目标个体位置状态绝对误差趋于零值,并且二阶个体的速度状态逐渐趋于相同的值与目标个体的速度状态变化趋势保持一致.与图3(c)和3(d)对比发现,增加连接边之后,目标个体一致性追踪的时间明显地缩短了.
实例2.考虑一个异质相依群体系统,该系统对应的图是有向通信拓扑图,并且含有一棵有向生成树,如图5所示.整个群体仍然由二阶个体组成的子群体GI和一阶个体组成的子群体GII所构成,也就是P1={1,2,3},P2={4,5,6}.这里,有向拓扑图对应的Laplacian矩阵和局部度矩阵为

类似地,取参数k1=1,k2=1,k3=9,k4=1,满足条件

所有个体和目标的位置状态和速度状态取值如下:
从图6可以看出,通过控制协议式(4)和式(5),异质相依群体系统逐渐地实现了一致性追踪.由仿真图6(a)结果分析,经过一定时间,所有个体的位置状态和目标个体的位置状态的绝对误差值基本趋于零值.由仿真图6(b)结果分析,二阶个体的速度经过一段时间之后趋于一致,并且能够完全跟踪上目标个体的速度信号状态.

图4 个体的位置状态追踪误差和速度示意图Fig.4 Position state tracking errors and velocities of individuals

图5 异质相依群体系统的固定有向拓扑图Fig.5 Fixed directed topology of the heterogeneous interdependent group system
4 结论
本文研究了带有固定通信拓扑的异质相依群体系统的一致性追踪问题,从个体性质不同和子群体间拓扑结构不同的角度,建立异质群体系统的相依模型.为了实现异质相依群体系统的一致性追踪,设计了一类分布式一致追踪控制协议.同时,给出了实现整个异质群体一致性追踪的充分条件.定义了衡量相依程度的相依比例参数Pr,分析了其对协同一致性追踪的影响.随后,通过仿真实例验证了理论结果的有效性.

图6 个体的位置状态追踪误差和速度示意图Fig.6 Position state tracking errors and velocities of individuals
