临近空间太阳能飞翼无人机气动性能设计仿真
2018-10-18,
,
(1.中国科学院 光电研究院,北京 100094;2.中国科学院大学,北京 100049;3.中国科学院 高能物理研究所,北京 100049)
0 引言
临近空间太阳能无人机是指以太阳能作为能量来源、以螺旋桨作为推进系统、依靠气动升力进行飞行的、飞行高度多位于18km以上的临近空间领域的电动无人驾驶飞行器[1-2],其飞行环境不同于传统飞行器,位于距地面20~100公里的临近空间空域[3]。临近空间的飞行环境,具有空气相对稀薄、环境压力低、风速变化大、太阳辐射强等特点。临近空间太阳能无人机作为一种新兴的飞行器,具有大巡航高度、长航时、大尺寸以及安全性好的特点。它可作为多种任务平台,如气象探测、通讯中继,互联网覆盖等[4]。
目前,临近空间无人机多采用传统常规布局,由于临近空间环境的特点,无人机飞行环境空气密度小,对发动机的工作效率产生限制,并且现阶段光伏材料能量转换效率低[5],能量供应有限,因而无人机的速度通常较低,飞行雷诺数较传统飞机低1~2个量级,飞行动压较小,其气动性能较差,且传统常规布局无人机外表不够平整,仅机翼可铺设太阳能电池,因而在临近空间太阳能无人机的能量供给上存在一定的限制,从而也限制了无人机的载荷携带以及无人机的任务需求。为改善临近空间太阳能无人机特性,除了选用气动性能更好的布局形式,也需保证其可增大太阳能电池的铺设面积以确保能量供应。
本文设计了一种大展弦比的临近空间太阳能飞翼无人机。相比目前常见的常规布局无人机,飞翼布局无人机具有较轻的结构重量、较好的气动特性等优势[6-7]。在总重相同的条件下,飞翼布局无人机较轻的结构使得其能够携带有效载荷,从而可使得无人机的任务更为多样化。临近空间太阳能无人机采用太阳能供能,需在其表面铺设太阳能电池,受目前太阳能电池自身特性的限制,无人机表面需尽可能的平坦,飞翼布局无人机在这一问题也具有较大优势,翼身一体化的布局形式,使得无人机全机表面均可铺设太阳能电池,从而在能量的供给上也优于传统常规布局的无人机[8]。此外,在考虑了临近空间飞行器低雷诺数[9]的特点后,选取了适用于飞翼布局无人机的低雷诺数反S翼型,并采用翼梢外洗设计来改善飞翼无人机的稳定性[10],以期得到更为优化的气动性能。
1 飞翼气动布局设计与仿真方法
1.1 飞翼布局设计原理
飞翼布局无人机无尾,机身与机翼融为一体,飞行时的升力大,阻力小,升阻比高。飞翼布局无人机所承受的全部重力基本上是沿展向分布的,与机翼的气动载荷分布情况基本一致,而不像常规布局飞机那样,重力主要集中在飞机中部,机翼要承受很大的弯曲载荷,因而飞翼布局无人机结构重量也比较轻[11]。此外,无尾的设计也有利于提高飞机的隐身性[12]。根据对飞翼布局气动特性的分析,在进行飞翼布局无人机设计时应注意:
巡航升力系数和纵向静安定度不能过大,由于飞翼布局无平尾和垂尾,因此其舵面效能较低,若使用过大的巡航升力系数会带来打的低头力矩,导致配平困难及配平阻力的增加,而过大的纵向静安定度则使无人机在非配平状态下需要较大的偏转角度,其相应会带来阻力的增加,导致升阻比下降[13]。
在飞翼布局无人机的减阻方面,由于飞翼布局采用了一体化设计原则[14],其浸润面积大大减小,因此其设计本身即可大幅度降低了摩擦阻力;对于诱导阻力,传统方法是增大展弦比和对环量进行控制,设计中为更加适用于临近空间,采用了大展弦比,并采用根梢比2.2的设计[15],使得环量沿展向尽量成椭圆形最佳分布,从而减少了诱导阻力;此外,对于干扰阻力,其主要是因部件之间的相互响而产生的,飞翼布局采用了无尾设计,并采用翼身一体化结构,故而该项阻力可大幅度降低。
根据文献调研[16],飞翼布局形式飞机升阻比范围如下:低速和亚声速可达15~18,跨声速可达10~12,最大马赫数为2的超音速飞机约为4~8。
本文所设计的临近空间太阳能飞翼无人机的展弦比为25,翼展为60 m,设计思路为:首先通过仿真分析,优选出适合临近空间飞行特点且适用于飞翼布局的反S型低雷诺数翼型,通过布置升阻特性良好的翼型,并进行适当的几何扭转即翼梢外洗设计,以提高全机气动性能。
1.2 翼型选择
根据临近空间飞行器低雷诺数特性,并考虑飞翼无人机稳定性要求,本文中选取适合于低雷诺数的反S翼型。分析几种低雷诺数翼型[17],由图1、2的结果,根据分析结果,选择翼型NACA 8-H-12,该翼型为反S翼型,俯仰安定性好,且升力系数不会过大而影响无人机配平,适用于翼身一体化的飞翼布局使用。
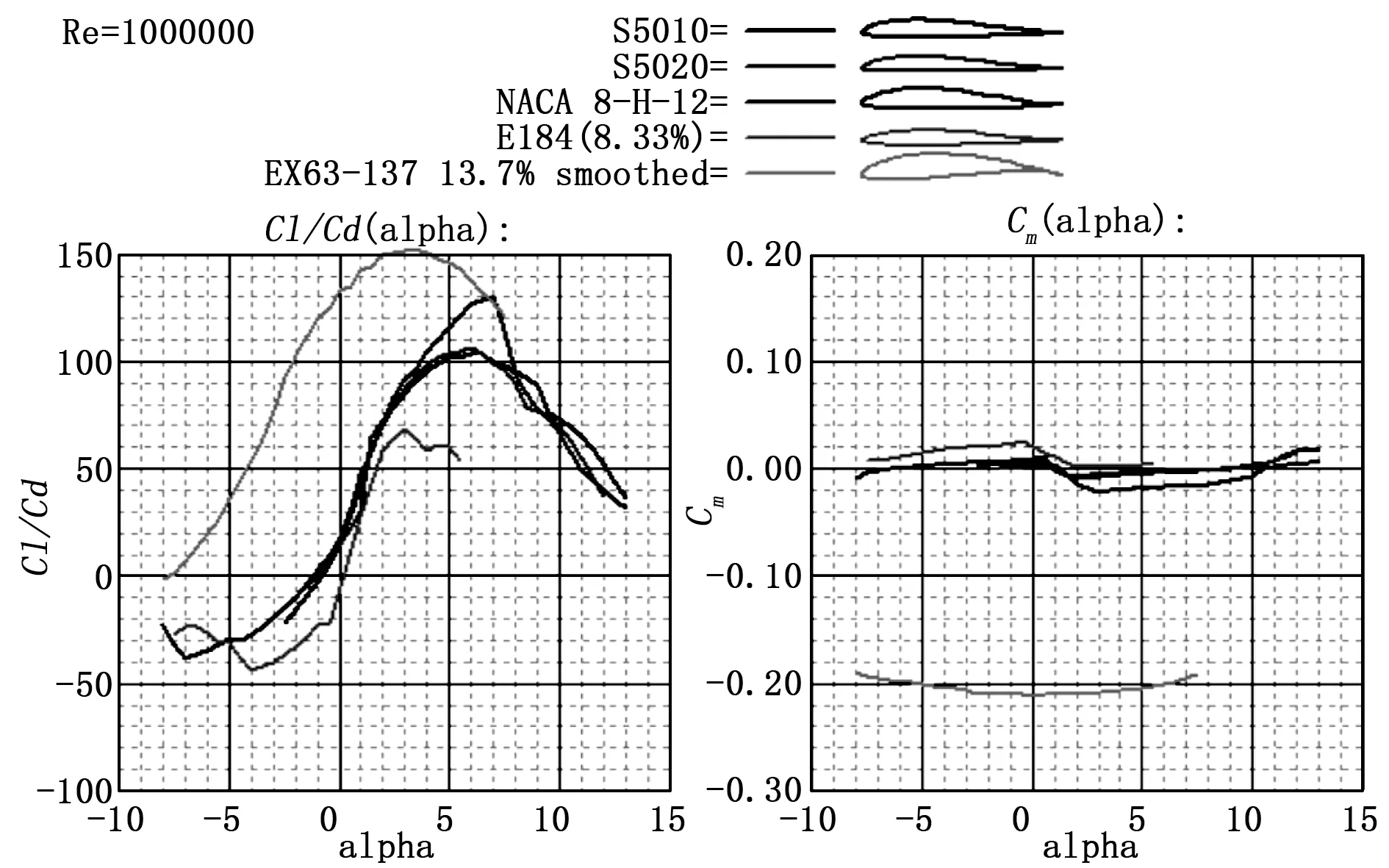
图2 低雷诺数反S翼型分析(b)
1.3 飞翼气动布局研究模型
在对太阳能无人机进行飞翼布局设计时,为使得无人机翼身一体化,气动性能更佳,采用内外机翼无机身模型[18],如图3,即将飞翼中间厚度较大的部分作为内段机翼,外侧厚度较小的部分作为外段机翼,使得整个无人机成为一个巨大的升力面,并在翼梢采用外洗设计,以改善飞翼无人机的稳定性,以期得到最佳的气动特性。具体气动布局如图4所示。
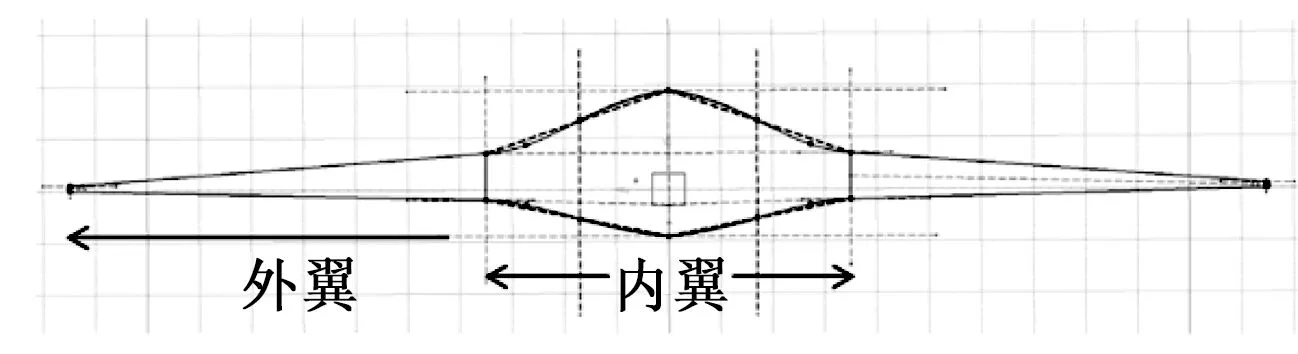
图3 临近空间太阳能飞翼无人机结构布局
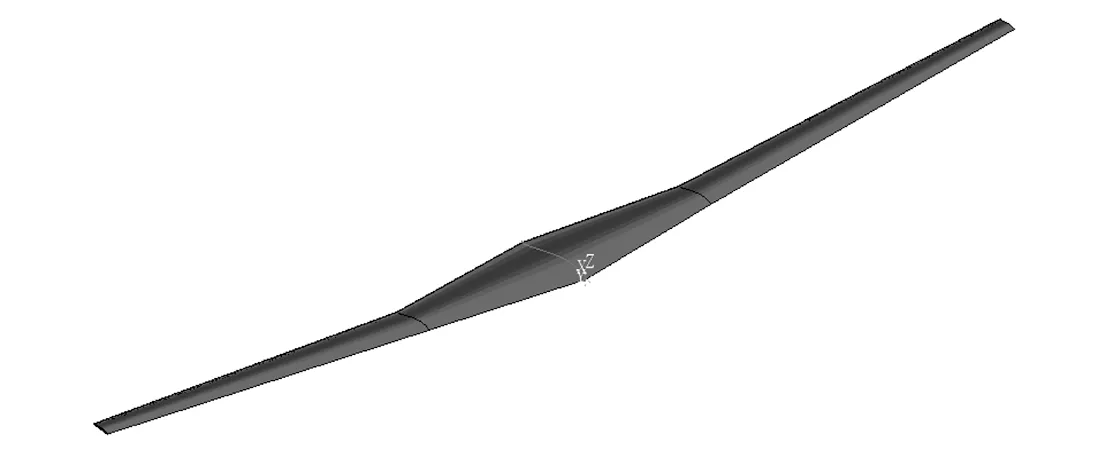
图4 临近空间太阳能飞翼无人机布局
临近空间太阳能飞翼无人机设计翼展为60 m,展弦比25 m,且翼型NACA 8-H-12,翼根处弦长取2.4 m,翼梢处弦长取1.091 m,可使根梢比接近2.2,使得环量沿展向尽量成椭圆形最佳分布。据此设计的临近空间太阳能飞翼布局无人机气动模型如图4。
飞翼无人机气动布局参数如表1所示。
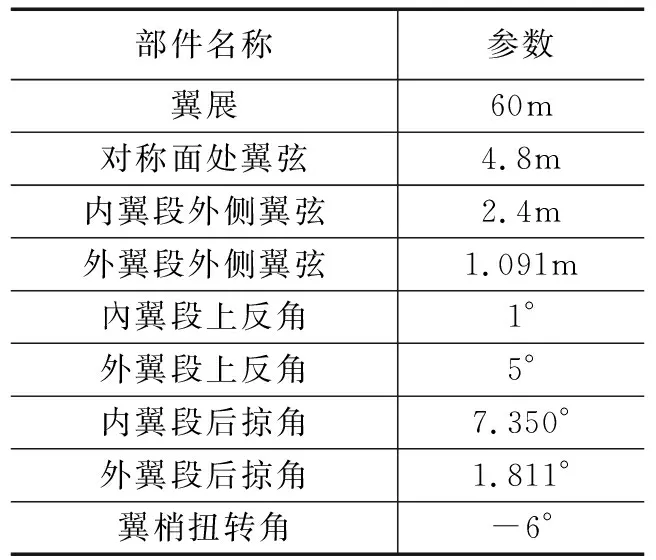
表1 临近空间太阳能飞翼无人机参数
1.4 数值计算方法
本文采用的数值模拟仿真方法,以三维雷诺平均N-S方程作为控制方程,并选用湍流模,对气动布局方案进行气动力计算。计算条件为20 km高度,空气密度为ρ=0.088 kg/m3,粘度系数为μ=1.4216×10-5Pa·s,来流速度为20 m/s,攻角α=-10°~20°。
1.4.1 控制方程
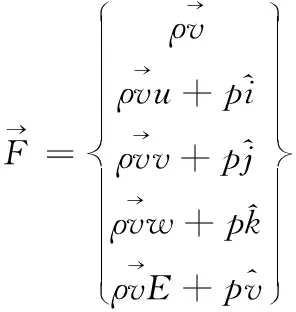
在笛卡尔坐标系下,三维雷诺平均N-S方程的一般形式为:
(1)
1.4.2 湍流模型
在本文计算中,利用Fluent,并选用湍流模型进行计算。计算条件为20 km高度,空气密度为ρ=0.088 kg/m3,粘度系数为μ=1.4216×10-5Pa·s,来流速度为20 m/s,攻角为α=-10°~20°。
取k-w湍流模型,其方程为:
(2)
(3)
其中:部分参数表达式具体如下:
式中,k为单位体积湍流动能,ε为单位体积湍流动能耗散率,d为当地音速,R为添加项,dk和d2分别为Prandtl对于k、ε的逆效应,Cμ、β、η、η0、C1ε为常数。
1.4.3 边界条件
计算的边界条件为无滑移条件,远场处为自由流条件,计算残差收敛精度为10-6。
1.4.4 网格生成
利用ICEM软件,基于多块理论,分析几何模型并进行块划分、修改等,并通过建立映射关系及边界节点调整,建立结构化网格,并检查及光顺网格,以期仿真计算结果更为精确。
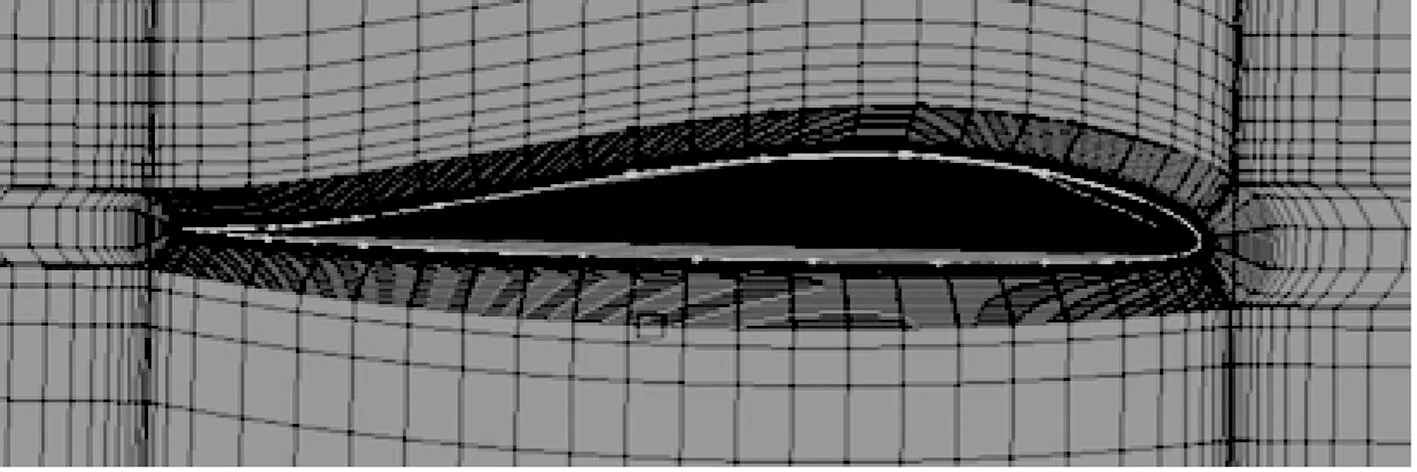
图5 临近空间太阳能飞翼无人机对称面边界层网格
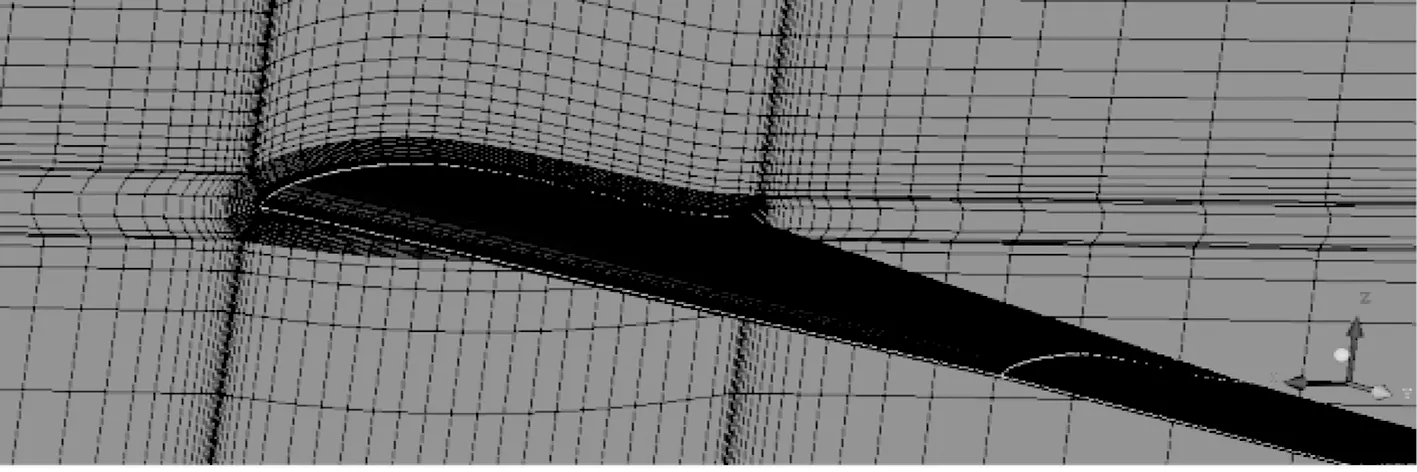
图6 临近空间太阳能飞翼无人机结构化网格
2 气动特性仿真结果与分析
2.1 升阻力特性
图7~图8为巡航速度20 m/s,巡航高度20 km处,临近空间太阳能飞翼无人机的气动特性计算结果。
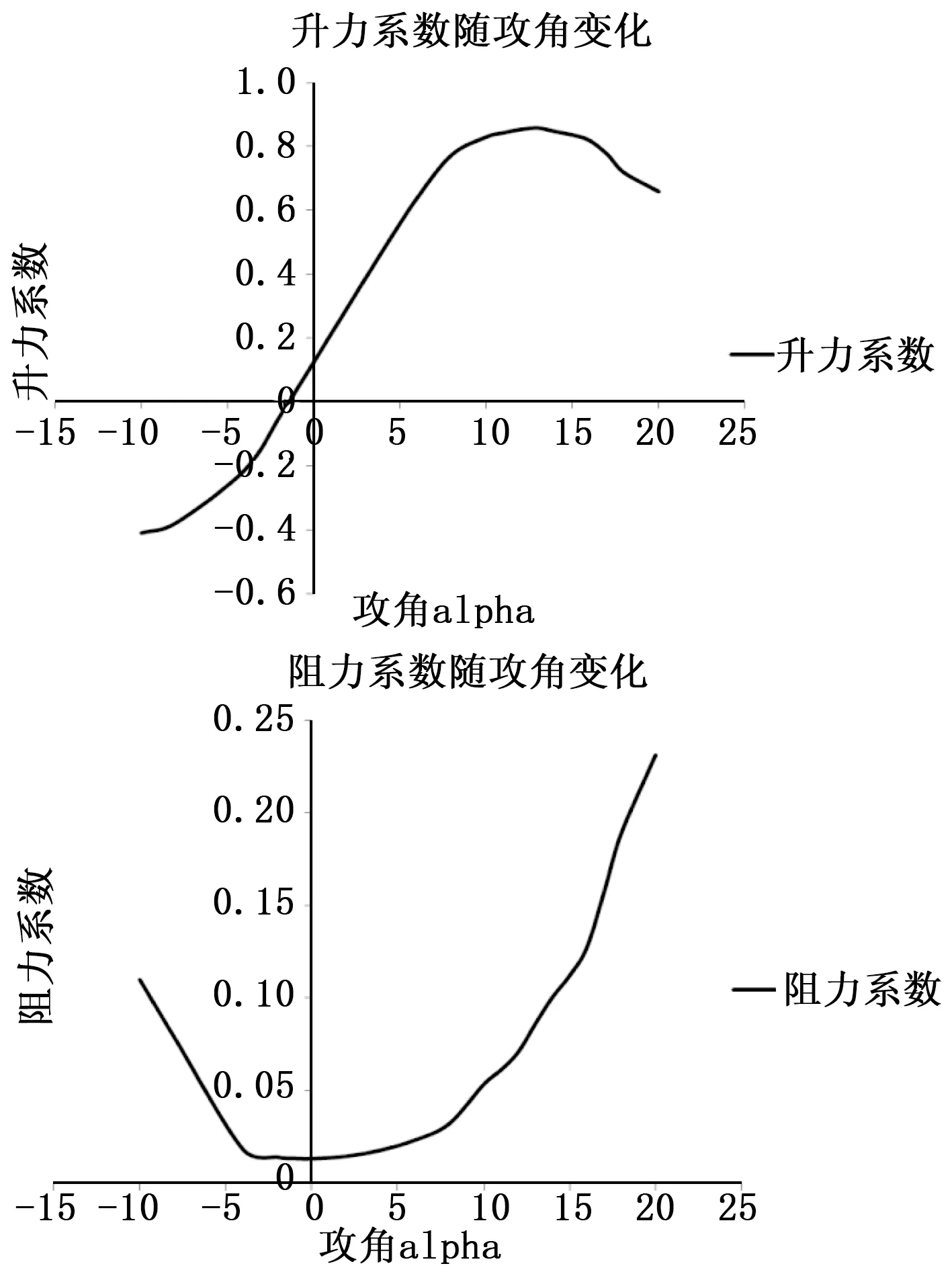
图7 升力、阻力系数随攻角变化曲线图
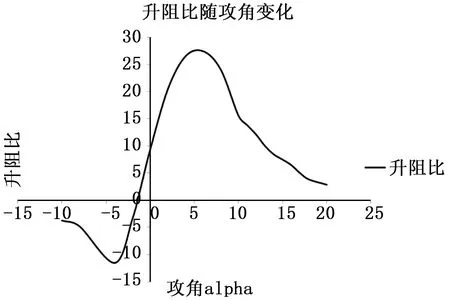
图8 升阻比随攻角变化曲线
由图可以看出,由于在机翼展向对于翼型及根梢比的合理选择,并进行了适当的几何扭转,有效减小了阻力,在0°攻角时的阻力系数仅为0.01342。同时,升力系数曲线的线性段较长,翼型在α=9°前,太阳能飞翼无人机的升力系数基本随攻角的增大而呈线性递增趋势,在9°~13°的范围内,升力系数CL开始偏离直线段,呈现非线性增加趋势,在α=13°时达到最大值,失速特性较好。
由计算结果可知,设计外形具有非常好的升阻特性,在仿真计算的攻角范围内升阻比较高,在失速攻角前呈现明显的线性递增趋势,在0°~10°的攻角范围内升阻比均保持10以上,更是在α=6°时达到最大值28,属于相当高的范围,该飞翼无人机的升阻特性提升非常明显。
2.2 纵向静稳定性
本文研究中,对太阳能飞翼无人机进行稳定性分析,采用机体坐标系,以机头为原点,沿对称面翼弦方向为x轴,并使用右手坐标系。当气动焦点与无人机重心重合时,其纵向力矩系数Cm基本不随攻角α变化。设置不同参数,调整无人机重心,当重心位置布置在x=1.725时,其结果如图9所示。
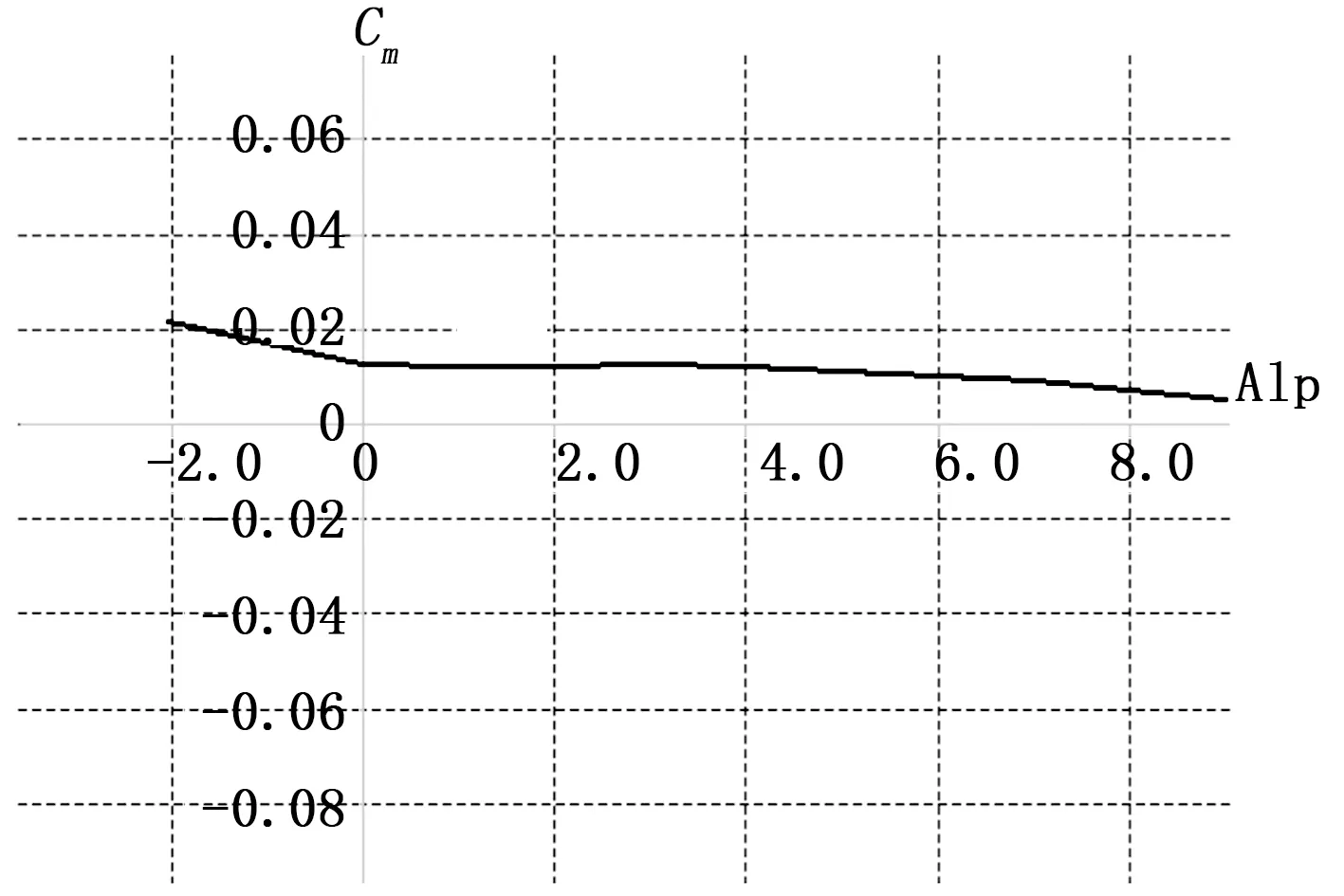

图9 重心与气动焦点重合时Cm基本不随攻角变化
由图9可知,该临近空间太阳能飞翼无人机的气动焦点在对称面上、x=1.725 m处。在设计阶段,应根据气动焦点的位置确定重心位置,为确保无人机的稳定性,需适当放宽静稳定性,将重心布置在气动焦点之前,并根据前述飞翼气动布局设计原理,静稳定裕度亦不可过大,这里取静稳定裕度12%,则重心位置为对称面上x=1.396 m处。
由于飞翼布局无尾翼的特点,为增加其稳定性,本文对飞翼无人机增加了翼梢外洗(翼梢扭转角-6°)的设计,飞翼无人机的纵向力矩系数Cm变化如下:
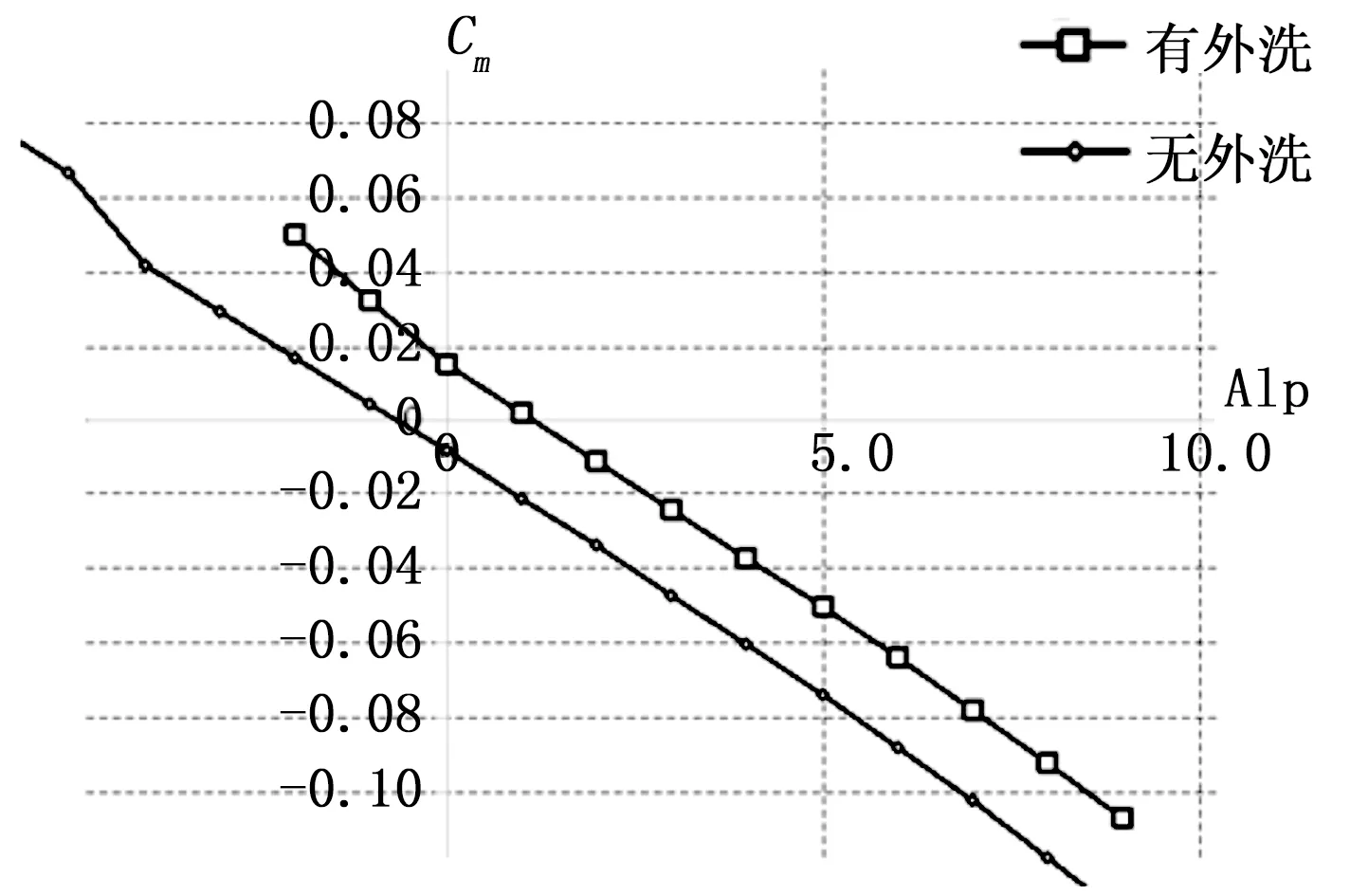
图10 纵向力矩系数Cm随攻角变化
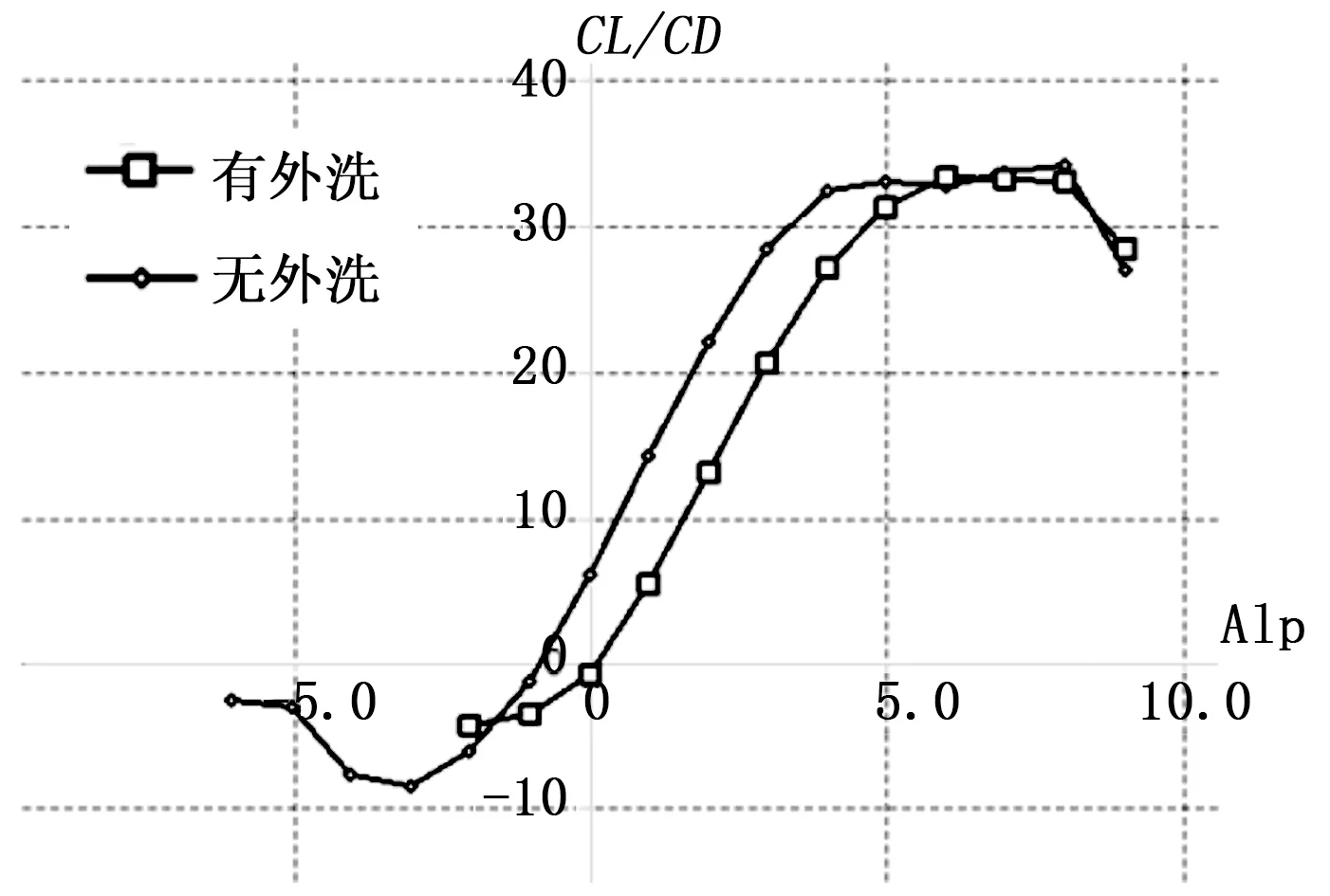
图11 升阻比变化随攻角变化
由图10~11结果可知,飞翼无人机的纵向力矩系数Cm曲线呈线性变化趋势,且斜率为负、基本不随攻角变化,充分说明飞翼无人机不是必然是纵向不稳定的。此外,当翼梢外洗设计时,同一攻角下无人机的升阻比略高,但零纵向力矩系数为负值,即无人机无法在正攻角情况下配平,且平衡攻角(Cm=0)处的升阻比太低,仅为0.82;采用了翼梢外洗设计后,飞翼无人机的零纵向力矩系数改善为正值,可在正攻角下配平,且平衡攻角(Cm=0)处的升阻比提高至6.1。综合考虑,采用翼梢外洗设计时飞翼无人机气动性能可得到明显的改善。
3 结论
作为一种先进非常规气动布局,飞翼布局与常规布局相比具有明显的气动性能优势。本文针对临近空间太阳能无人机,利用数值方法对其进行了气动仿真分析,结果表明:由于临近空间的飞行环境决定了临近空间飞行器的低速、低雷诺数特性,进而造成了临近空间太阳能无人机飞行动压小的特点,通过选用飞翼、大展弦比的气动布局形式,可明显弥补现有临近空间太阳能无人机常规布局的气动不足。临近空间太阳能飞翼布局无人机从气动外形上看,为翼身融合设计,整个飞机是一个升力面,设计符合全升飞行器(All-Lifting-Vehicle)概念,即飞行器上所有的水平安装部件都能够在全包线内成比例的提供升力,提高了升力特性,其大展弦比机翼又可以有效地减小诱导阻力,无尾布局形式亦避免了尾翼带来的附加阻力,大的升力特性和小的阻力特性使得飞翼布局的无人机具有高升阻比特性,在攻角处的阻力系数仅为0.01342,升阻比可达9.3152,最大升阻比可达28,明显超越前述文献调研中的飞翼布局低速飞机15~18的升阻比范畴,气动特性更为良好;为贴合飞行环境以及改善飞翼布局稳定性而采用的反S翼型和翼梢外洗设计也使得该飞翼无人机的稳定性得到明显提升,使得无人机可在正攻角下配平,平衡攻角处的升阻比由无外洗设计时的0.82提升至有外洗设计时的6.1。