仿生水母机器人SMA驱动技术及试验研究
2018-10-17谭俊哲闫家政王树杰司先才
谭俊哲,闫家政,王树杰,袁 鹏,司先才
(1.中国海洋大学工程学院,山东 青岛 266100;2.青岛市海洋可再生能源重点实验室,山东 青岛 266100)
水生生物在游动时,具有效率高、噪声低和机动性强等优点,相比于传统的水下螺旋桨推进器,具有明显的优势[1]。水下生物游动的方式主要分为:身体/尾鳍推进模式和中央鳍/对鳍推进模式和喷射推进模式[2]。其中喷射推进是水下生物游动中最为原始、最为简单的运动方式。水下生物的喷射推进是通过收缩自身腔体,将腔体内液体喷出,从而产生反向的矢量推力,其反向推动力使生物运动。
近年来,智能材料的出现,为科技工作者研制仿生驱动器提供了可能。形状记忆合金(Shape Memory Alloy,SMA)、压电陶瓷(Piezoelectric Transducer,PZT)、电流驱动聚合物(Ion-exchange Polymer Metal Composite,IPMC)已经被成功应用于仿生水下机器人的研制中,用来制造水下生物仿生驱动器。如美国东北大学的科研人员,根据鳗鱼的游动机理,使用形状记忆合金作为驱动材料,研制出了仿生七鳃鳗[3]。美国弗吉尼亚大学研制出了运用IPMC驱动的仿生蝠鲼机器鱼,通过实际测算,该机器人的游动速度可以达到0.74cm/s[4]。哈尔滨工程大学的科研人员研制出了SMA和IPMC共同驱动的仿生水母机器人[5]。哈尔滨工业大学根据墨鱼的游动原理,研制出了基于SMA驱动的仿生墨鱼机器人[6]。另外哈尔滨工程大学的科研人员使用IPMC作为驱动材料,研制出了自主微型机器鱼[7]。
本文以海洋生物水母的喷射推动式游动原理为基础,采用SMA弹簧作为驱动材料,对SMA弹簧驱动仿生水母机器人技术的可行性进行了研究,研制了基于SMA弹簧驱动的仿生水母机器人及其控制电路。并对仿生水母机器人进行了流体力学数值模拟,得出了水母在游动过程中不同工况下的阻力分布情况。并对研制的仿生水母进行了试验研究,试验表明基于SMA驱动的仿生水母可以很好地模拟水母的运动,实现沿轴向方向的直线运动。
1 SMA弹簧驱动性能研究
普通金属材料在外力作用下,会产生弹性形变,当外力大于材料的屈服强度后,材料就会产生塑性变形,并且其过程不可逆,而形状记忆合金在受到外力作用产生塑形变形后,通过加热使其达到相变温度后,能够恢复到原来的形状,并且有力的输出,通过这种特性,可以使用形状记忆合金来作为仿生机器人的驱动材料。
SMA材料主要分为丝状和弹簧两种形式。相同内径的SMA丝和SMA弹簧加热到相变温度时,SMA丝产生的应力要比SMA弹簧大很多[8]。但由于SMA丝产生的变形量较小,而使用SMA弹簧的径向变形量较大,为了使仿生水母机器人的内部结构紧凑,同时SMA弹簧又可提供足够的拉力,故选取SMA弹簧作为驱动器材料。
为了验证SMA弹簧作为仿生机器人驱动材料的可行性,且测定SMA在不同驱动电压下的响应情况,对SMA弹簧进行试验研究,其试验装置工作原理如图1所示。在室温为20 ℃的空气中,选取原长度为8 mm,丝径为1 mm,相变温度为45 ℃的SMA(TiNi基)弹簧进行试验研究。

图1 SMA弹簧测试装置Fig.1 The testing device of SMA spring
为了模拟外部载荷,在SMA弹簧下端挂上质量为50 g的砝码。将SMA弹簧拉长至27 mm,分别对SMA弹簧施加1.5、2和3 V的驱动电压,通过位移测量装置测量每一时刻砝码的位置,并记录砝码的位移数据。为了减小测试偶然性带来的误差,对不同电压下SMA弹簧的变化情况进行多次测量,然后把测量后的实验结果取平均值。绘制SMA弹簧长度和时间曲线图,如图2所示。

图2 SMA弹簧长度—时间曲线图Fig.2 The length-time curve chart of SMA spring
由图2可知,在相同的负载情况下,由于SMA弹簧的驱动电压不同,弹簧的形变响应速度也不同。驱动电压由1.5 V提高到3 V时,SMA弹簧由伸长状态恢复到原状态的时间由17 s缩减到6 s,这说明随着驱动电压的提高,SMA弹簧的形变速度也会加快。同时,对于同一驱动电压,由于电流热效应的累积,SMA的形变速度会随着通电时间的增加而变快。
SMA弹簧可以提供的形变量可以是自身弹簧长度的几倍。同时,通过试验可以发现,SMA弹簧在负载一定的情况下,其形变速度符合一定的规律,故在实际情况下,可以通过对SMA弹簧驱动电压以及通电时间的控制,来控制SMA弹簧的形变速度。以上试验时在室温为20 ℃的空气状态下进行测定的,在对SMA弹簧进行水下形变测试时,考虑到水温等因素的影响,为了使SMA弹簧达到相变温度,需要较大的驱动电压以及较长的通电时间。
2 基于SMA的直线差动式驱动器及水母机器人
2.1 基于SMA的直线差动式驱动器
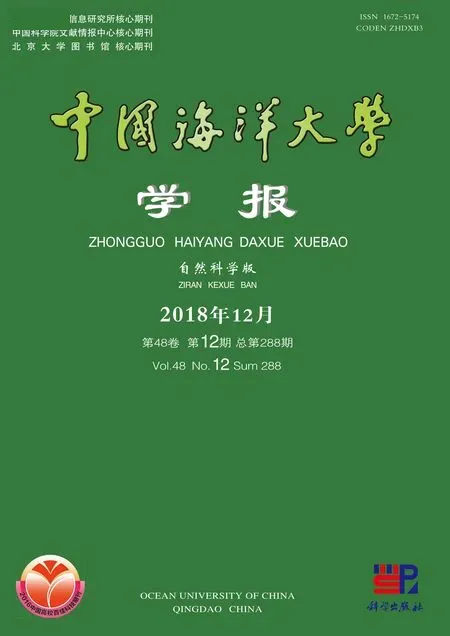
水母在游动的过程中,其头部的上半部分基本保持不动,主要通过身体中下部分的收缩,使其腔体内的液体喷出,从而使水母反向运动。本文所设计的仿生水母机器人结构及其具体尺寸如图3(a)所示。为了模拟水母在游动时腔体的收缩和扩张运动,在仿生水母设计中采用6组曲柄滑块机构,均匀分布在仿生水母控制舱体的底端,使用SMA直线推杆驱动器上下的运动带动曲柄滑块机构运动,实现腔体的收缩扩张过程,且在连杆机构外侧包覆弹性蒙皮,模拟实现水母的喷射推进方式。本设计中使用的基于SMA的差动式直线推杆驱动器如图3(b)所示。
图3(b)中,驱动器上下两段SMA弹簧与推杆顶端相连,电源导线A、B与上段SMA弹簧相连,电源导线B、C与下段SMA弹簧相连。导线B为连接上下两段SMA弹簧的公共端。在系统初始状态下,上下两段的SMA弹簧均处于微拉伸状态,推杆位于中间位置;当导线A和导线B通电时,在电流热效应作用下,上段SMA弹簧会发热,达到SMA弹簧的相变温度后,SMA弹簧开始收缩,带动推杆向上运动,同时推杆作为曲柄滑块机构的原动件,带动6组曲柄滑块机构同时运动,从而实现仿生水母腔体的收缩过程,如图3(c)所示;断开导线A、B,待SMA弹簧冷却后,接通导线C和导线B,同样下段SMA带动推杆向下运动,实现仿生水母腔体的扩张过程,如图3(d)所示。如此,反复以上过程,可实现仿生水母腔体的收缩和扩张过程。
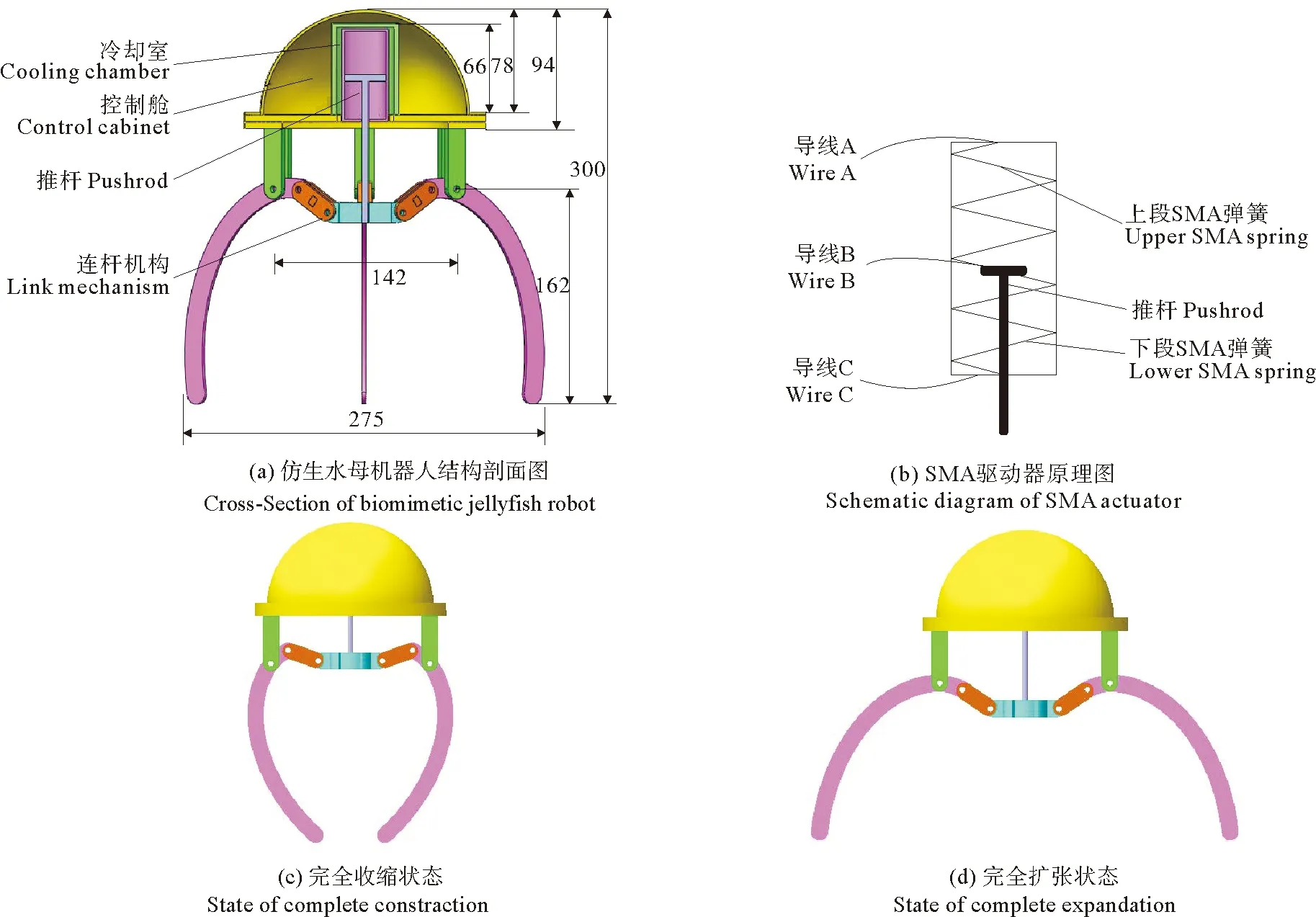
图3 差动式SMA直线推杆驱动器及仿生水母三维模型图Fig.3 Differential SMA liner pushrod actuator and 3D graph of biomimetic jellyfish robot
在SMA直线推杆驱动器中,其中一段SMA弹簧通电发生相变后,需要冷却到一定温度后才能使另外一段SMA弹簧进行通电运行,否则会使驱动器无法运作或者降低直线推杆驱动器的效率。若这样应用到仿生水母机器人中,就会大大降低游动的效率,所以需要降低SMA弹簧冷却的时间。为了获得更高的游动效率,在仿生水母中设置了冷却室,冷却室与头部部分(即放置电源、控制电路部分)隔离,但与外界直接相通。在控制舱底板处开设小孔,可以让水直接进入冷却室,加快SMA弹簧的冷却速度。由于SMA弹簧在通电的状态下不能与水直接接触,在SMA弹簧的外部套了使用特制的聚烯烃材质套管。这样SMA弹簧就可以与水隔离,同时又加快了冷却效率。
2.2 SMA直线差动式驱动器性能研究
为了研究SMA直线差动式驱动器运动速度与负载的关系,选取丝径为1 mm,弹簧内径为12.7 mm的SMA(TiNi基)弹簧制作SMA直线差动式驱动器进行试验研究。使用驱动电压为3 V,通过改变负载的大小,计算在不同负载下,驱动器推杆的平均速度。采用如图1所示的测量装置,使用砝码模拟外界负载,测试SMA直线差动式驱动器不同时刻下中间推杆的位移量。图4所示为在不同负载下,直线推杆驱动器速度曲线。
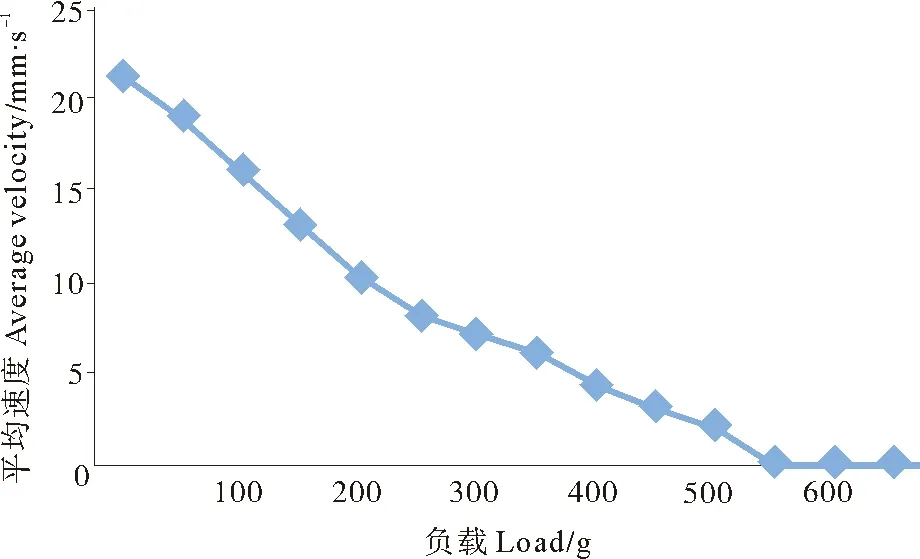
图4 SMA直线推杆驱动器速度—负载曲线图Fig.4 The SMA liner pushrod actuator′s velocity load curve chart
由图4所示,在相同的驱动电压下,随着负载的增加,直线推杆驱动器的平均速度逐渐减小。这是由于负载的增加,SMA需要提供更大的拉力,这就要求SMA达到更高的温度,以获得足够的驱动力。另外在外部负载过大时,直线推杆的运动速度为0,这是由于负载过大,SMA弹簧加热完成相变之后仍然无法提供足够的拉力。同时,当负载过大,直线推杆无法运动时,如果长时间的通电,SMA的温度会一直上升,达到一定温度后,SMA弹簧会被重新定义形状,此时,SMA材料对之前的形状已不具备记忆效应。因此,在SMA材料使用过程中,要注意控制材料的通电电压、电流及通电时间,以免材料形状被重定义,失去记忆功能。
2.3 仿生水母机器人控制系统
仿生水母驱动器的设计是仿生水母机器人运动的基础,而控制系统则是仿生水母机器人能够按照人的意愿运动的关键。仿生水母机器人控制系统主要包括电源模块、单片机控制模块、驱动模块组成。本文采用的主控芯片为AT89S52单片机,驱动模块采用完整的全桥驱动芯片加极低内阻的MOSFET组成。主要原因记忆合金的电阻较小,要想在较短的时间内达到较高的温度需要很大的驱动电流,本文使用的SMA弹簧驱动电压最高为12 V,驱动电流约为10 A。采用单片机PWM脉冲方式来控制MOSFET的通断,进而控制SMA弹簧温度的变化。控制系统如图5所示。
图5 仿生水母控制系统结构图Fig.5 The control system structure of biomimetic jellyfish robot
根据仿生水母机器人的运动规律,制定基于SMA弹簧的直线推杆驱动器的控制流程图见图6。
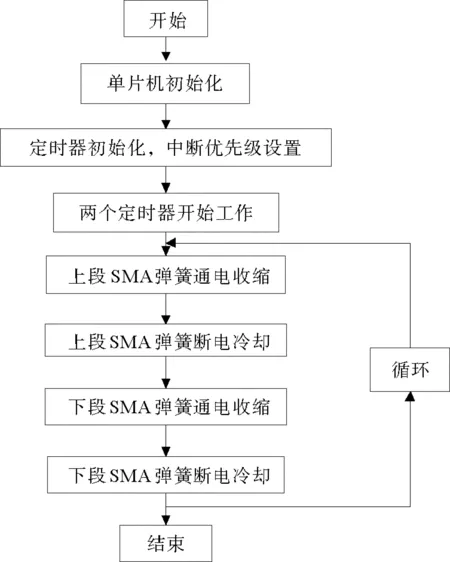
图6 驱动器控制流程图Fig.6 The control flow graph of actuator
3 仿生水母机器人运动阻力数值模拟
3.1 仿生水母机器人的动力学分析
仿生水母机器人游动时的动力来自于腔体内液体压出时本体所受到的反作用力。SMA弹簧驱动器带动直线推杆的运动,通过6组曲柄滑块机构完成腔体的收缩及扩张。仿生水母机器人在游动的过程中,其受到的推力主要集中在沿水母轴线的方向上,故在受力分析时,可以只考虑沿水母轴向方向上的力,而忽略其他方向上的分力。
仿生水母机器人在水中通过调节配重块的质量使重力与浮力相等,使仿生水母机器人一直处于悬浮状态,故在动力学分析中,忽略重力与浮力。对于仿生水母机器人,在游动的过程中,在水中主要受到力主要分为四部分:推进力T、流体阻力D、加速度反作用力G、惯性力F[9]。其四者的关系如下:
T=D+G+F。
(1)
由于T为推进力,由SMA弹簧驱动器提供,故可通过对SMA弹簧通电的电压和通电时间进行控制。D为流体阻力,与装置在前进方向上面积投影的大小以及速度的平方成正比。F为惯性力,与水母腔体的体积以及水母游动的加速度成正比。
在沿仿生水母轴线方向,其质心的运动方程可以表示为:
(2)
在对仿生水母机器人进行实际的游动时,需使只能在水母轴线方向上运动,不允许其有横滚的运动。故要均匀布置六个曲柄滑块装置,使其产生的对防生水母轴线的转动合力矩为零。仿生水母绕其轴线转动的运动方程可以表示为:
。
(3)
式中:J为仿生水母绕轴线的转动惯量;ω为仿生水母机器人的转动角速度;M为仿生水母机器人受到的总的转动力矩;Fi为每个四杆机构产生推力时产生的附加的对轴线的转矩;r为四杆机构到轴线的距离;MD为仿生水母机器人转动时受到的阻力矩。
3.2 仿生水母运动阻力数值模拟
根据仿生水母机器人在实际游动中的运动状态,在进行数值计算时使用定长MRF模型,模拟计算仿真时采用的研究对象为不可压缩液体,流场的入口速度为已知,流场的出口为变量,定义出口边界条件为outflow。定义流场的表面为wall。选择基于压力形式的3D求解器。计算模型设置为k-epsilon湍流模型,设置残差监视精度为0.001;设置迭代计算步数,计算完成后输出结果。
为了获得仿生水母机器人腔体变化过程中水母所受流体阻力变化情况,本文选取了仿生水母机器人在运动过程中收缩状态、半张开状态和完全张开状态三种不同的工况进行仿真,三种不同工况下,推杆以及曲柄滑块机构的参数如表1所示。

表1 推杆及曲柄滑块参数Table 1 The parameters of pushrod and slider-crank
通过对仿生水母模型在三种不同工况下做数值模拟,得到了仿生水母模型在三种工况下所受游动阻力随速度的变化情况,如图7所示。
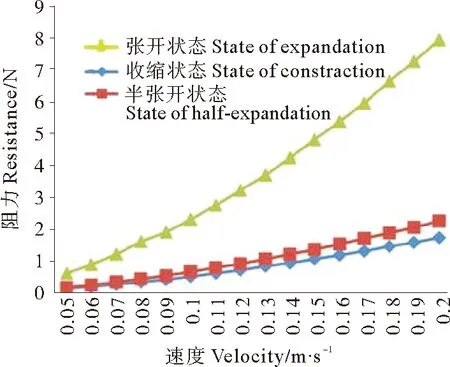
图7 水母机器人游动阻力—速度关系图Fig.7 The relationship of biomimetic jellyfish robot′s resistance-velocity
由图7可知,在三种不同工况下,仿生水母机器人在游动的过程中,其受到的阻力都会随着游动速度的增加而增加,在张开完全张开位置,其最大值为8 N,并且阻力的增加速率也在逐渐增加。这是因为当游动速度增加时,水流对水母机器人的阻碍作用在增加,并且随着速度的增大,水流的阻碍作用也会变得越来越明显。在收缩状态和半张开状态这两种工况下,水母机器人所受到的水流阻力相差不大,这说明在水母机器人腔体扩张的前半段,由于仿生水母机器人头部空间的影响,水流速度对其游动性能的影响较小。在同一游动速度下,对比三种不同的工况,水母机器人所受到的水流阻力在增大,这说明在仿生水母机器人腔体扩张时,水流对水母机器人的阻碍作用在增加。
4 验证试验
为了验证SMA驱动的仿生水母机器人的游动性能,对仿生水母机器人进行试验研究。
仿生水母机器人采用的是单片机控制系统,为了更方便地调节单片机控制参数,试验时将控制系统用导线引出外置。试验水温为20 ℃。分别选取电源电压为6、9和12 V进行实验,设置上段SMA弹簧通电时的PWM占空比为0.9,下端SMA弹簧通电时的PWM占空比为0.5。其中驱动电压为12 V时的控制时序如图8所示。

图8 仿生水母控制时序图Fig.8 Control timing chart of biomimetic jellyfish robot
根据试验结果,整理试验数据如表2所示。
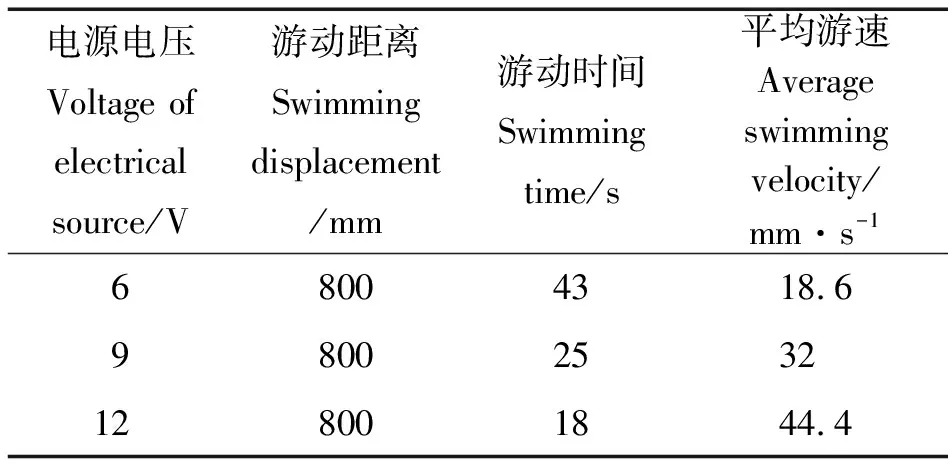
表2 不同驱动电压下水母机器人游动参数Table 2 The velocity of biomimetic jellyfish robot under different voltage
由表2可知,当驱动电压分别为6、9和12 V时,仿生水母机器人均可实现单自由度游动,并且平均游动速度与驱动电压成正比关系,当驱动电压为12 V时,仿生水母机器人可达到44.4 mm/s的平均游速。仿生水母游动图像如图9所示。

图9 仿生水母机器人游动图Fig.9 The photos of jellyfish robot swimming
5 结论
本文以水母游动原理为基础,采用SMA弹簧作为驱动材料,设计出一种基于SMA弹簧的差动式直线推动驱动器。并且以曲柄滑块机构作为传动装置,模拟水母的喷射式推进方式,设计出了基于SMA驱动的仿生水母机器人,并完成了试验模型进行试验。基于以上研究,得出如下结论:
(1) 由于SMA弹簧具有单程记忆效应,故在通电后,由于电流的热效应,SMA弹簧会产生收缩变形,并且有力的输出。同时弹簧的形变速度与驱动电压有关,驱动电压越高,SMA弹簧形变速度越快。
(2) 采用直线差动式SMA弹簧驱动器,可以实现推杆的往复运动,当推杆带动执行机构运动时,可以模拟水母运动时腔体的收缩扩张过程。
(3) 通过流体动力学数值模拟,得到了仿生水母游动时不同工作状态下阻力变化情况,验证了基于SMA弹簧驱动仿生水母机器人运作的可行性。通过试验验证,仿生水母完成了基本的直行运动,为以后的优化设计提供理论依据。
(4) 同时,对基于反馈SMA弹簧精准控制技术缺乏一定的理论基础,故SMA控制技术将会是下一步工作的重点。