用于辅助电源Buck变换器的切换滑模控制策略
2018-10-15马光亮续丹王斌张乐周佳辉
马光亮,续丹,王斌,张乐,周佳辉
(西安交通大学机械工程学院,710049,西安)
随着能源危机、环境污染和气候变暖等问题日益加剧,新能源的开发与利用越来越受到研究者们的关注,电动汽车、燃料电池、太阳能、风能等新能源产业应运而生[1-3]。然而,由于电动汽车储能系统、燃料电池、太阳能电池等供能系统的输出电压会大范围波动,因此无法直接为负载供能[4]。另外,对于电动汽车,其供能系统通常被设计为高电压输出[5-6]。供能系统的高电压输出和大电压波动特性,使其只能借助降压型辅助电源向低压电器设备供能。因此,作为非线性时变系统的降压(Buck)变换器,成为保证辅助电源低压稳定输出的关键部件[7-8]。然而,在Buck变换器的实际应用中,由于负载突变、输入电压波动等原因,其开关控制策略常常存在控制效果差、策略实现复杂度高等问题[9-10]。为提高辅助电源系统的鲁棒性和抗干扰性,设计有效的控制策略就显得尤为重要。
滑模控制因具有高稳定性、强鲁棒性、快动态响应等优点而被广泛应用于非线性时变系统、不确定系统和切换系统中[11-13]。基于滑模控制理论,多种滑模控制策略相继被提出,如积分滑模控制[14]、自适应滑模控制[12,15]等。为改善线性滑模控制策略的渐进收敛性,非线性滑模控制策略得到了深入研究。在非线性滑模控制策略中,终端滑模控制策略因其能保证系统状态在有限时间内收敛至平衡点而成为经典[16]。然而,Buck变换器采用终端滑模控制,涉及的负分数指数将导致奇异问题,最终影响系统稳定性[13,17]。文献[17]中Buck变换器的非奇异终端滑模控制策略虽有效克服了奇异问题,但该策略与终端滑模控制策略一样涉及指数运算,且无法避免正负双向输出,使得该滑模控制策略在实际工程中的实现难度陡增。
为了克服上述滑模控制存在的实现复杂度高及奇异点导致的不稳定问题,本文设计了一种新的用于辅助电源Buck变换器的切换滑模控制策略。首先,分析了终端滑模控制和非奇异终端滑模控制两种非线性控制策略;基于非奇异终端滑模控制策略设计了新的切换滑模面函数并对其进行分析;进一步,基于MOSFET开关的导通与关断状态,建立了Buck变换器的状态空间模型;为保证切换滑模控制系统稳定性,基于上述状态模型,并结合Lyapunov稳定性准则,确定了控制策略的限制条件;最后,通过仿真和实验,验证了所设计的用于辅助电源Buck变换器的切换滑模控制策略对提高系统动态响应速度、鲁棒性及稳定性的效果。
1 两种非线性滑模控制策略分析
为更好地进行切换滑模控制策略设计,首先对终端滑模和非奇异终端滑模两种非线性滑模控制策略进行分析。
单输入单输出的二阶非线性系统微分方程可表述如下
(1)
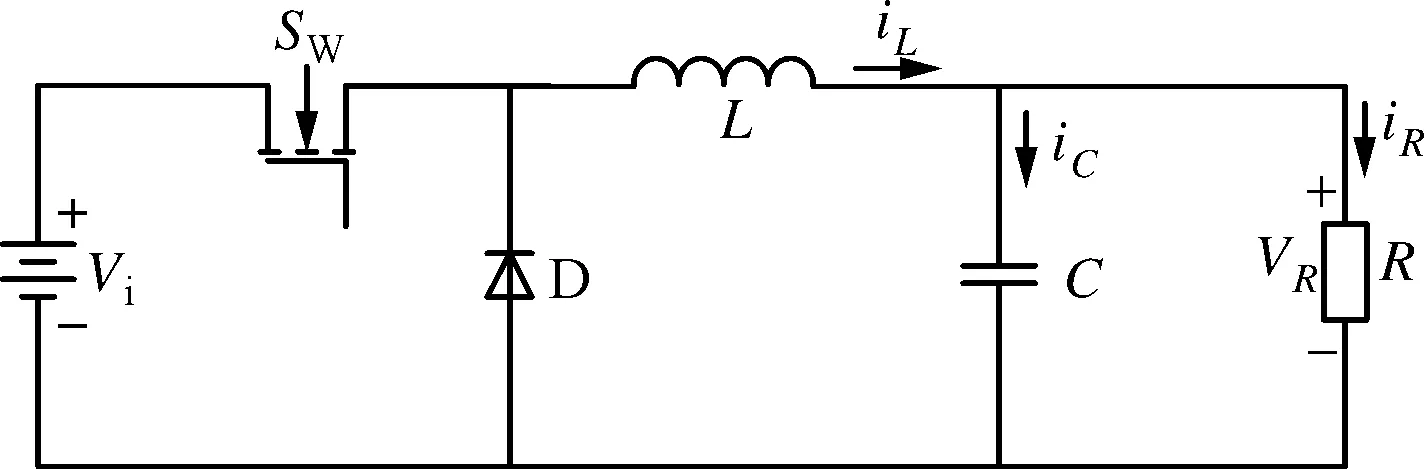
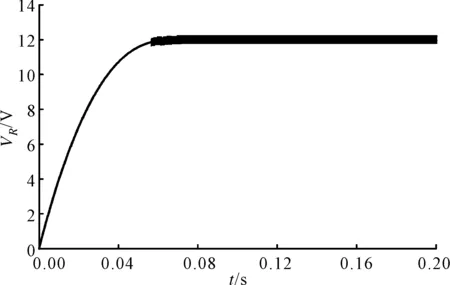
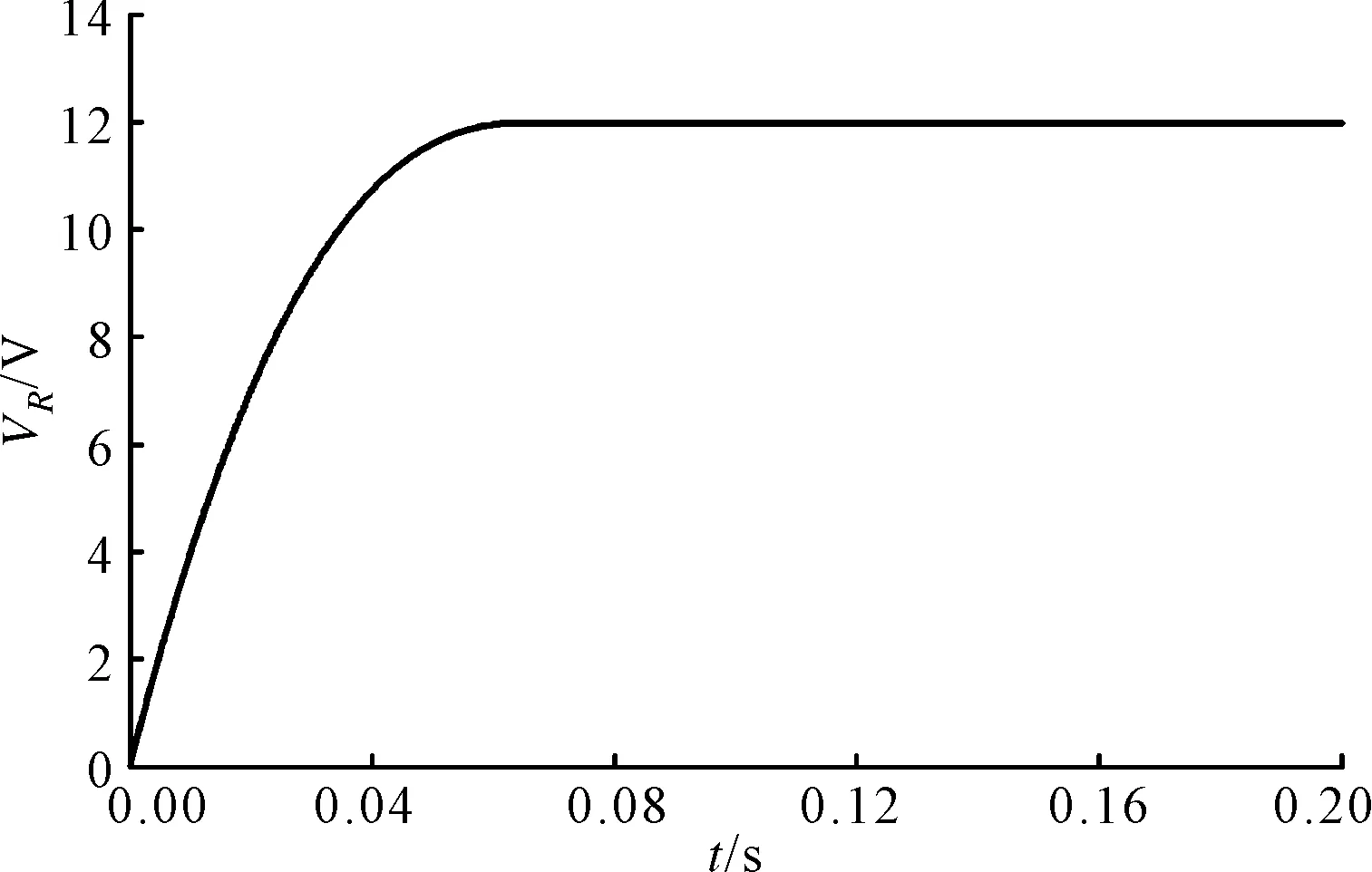
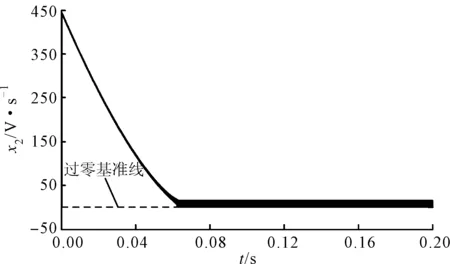
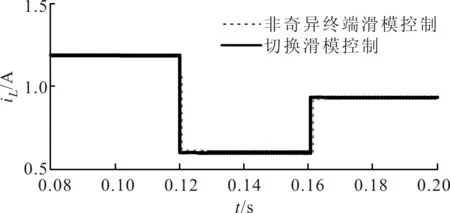
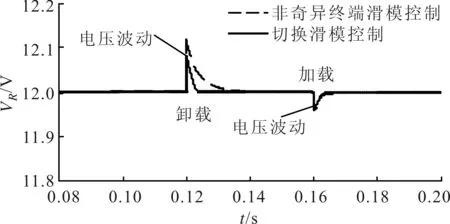
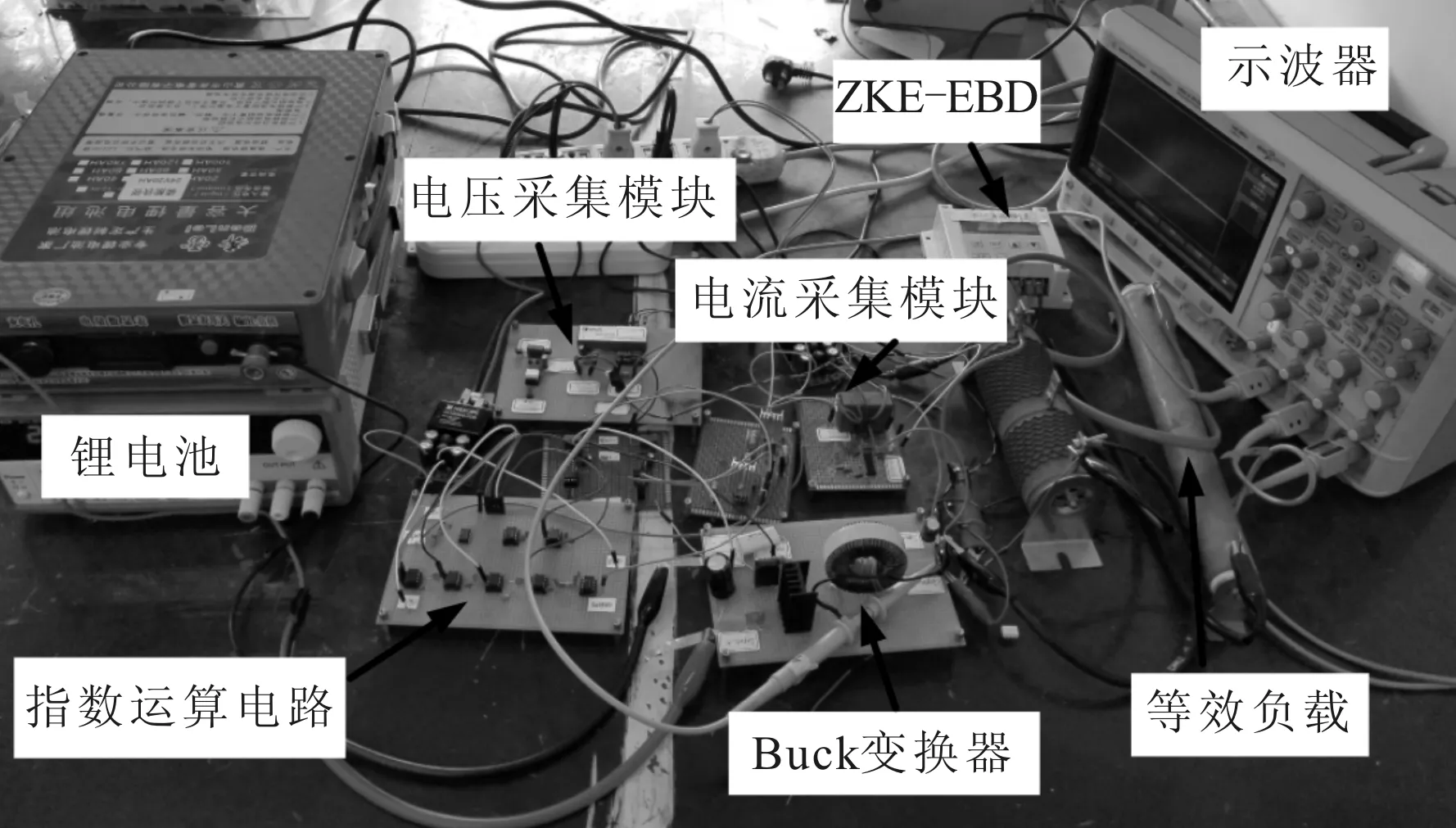
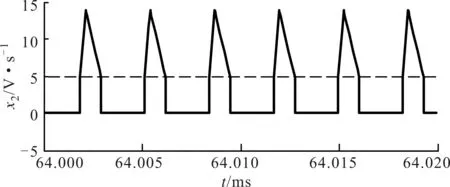
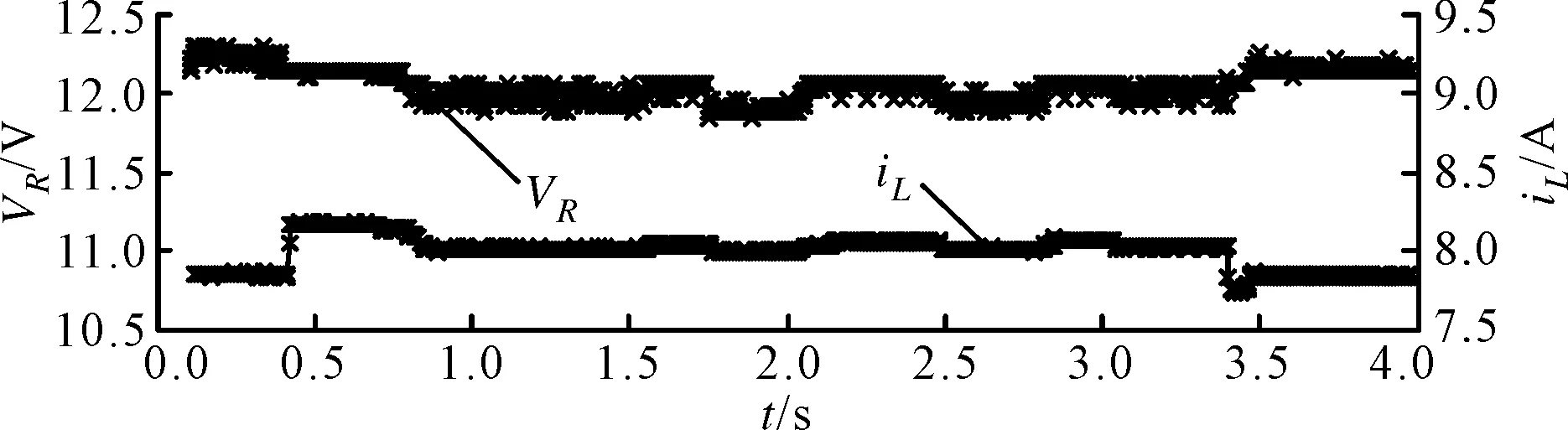
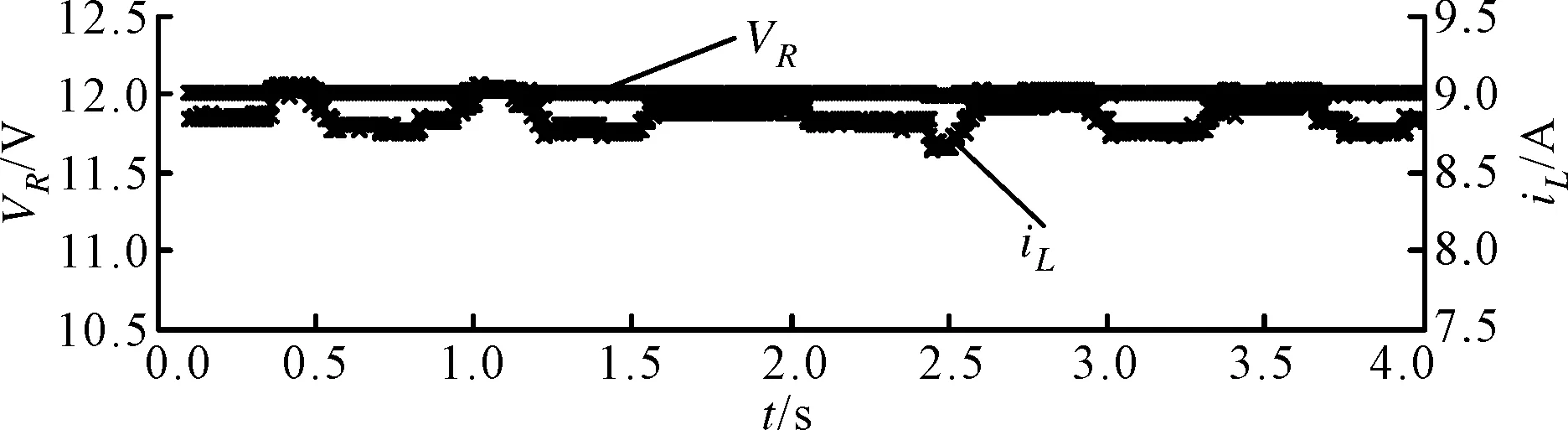
式中:X=[x1,x2]T是系统状态向量;A(X)和B(X)是已知函数,且|B(X)|≠0;C(X)为不定量,|C(X)| 非线性终端滑模面函数表示如下[9] (2) 式中:β为调节滑模面函数斜率的参数,β>0;p和q为正奇数,p>q。 结合式(1)和式(2),终端滑模控制策略的控制量可被设计为 (LC+δ)sgnST] (3) 式中:δ>0为控制增益;sgn(·)为符号函数。式(3)表示的控制量可确保式(1)所描述的系统满足滑模存在性条件 ST[C(X)-(LC+δ)sgnST]<-δ|ST| (4) 为消除1.1节中所描述的终端滑模控制策略的奇异问题,有学者提出了非奇异终端滑模控制策略,其非线性滑模面函数表示如下[18] SN=x1+(βx2)p/q (5) 结合式(1)和式(5),非奇异终端滑模控制策略的控制量可被设计为 (LC+δ)sgnSN] (6) 同样地,式(6)表示的控制量可以确保式(1)所描述的系统满足滑模存在性条件 -δζ|SN| (7) 为克服终端滑模控制策略和非奇异终端滑模控制策略存在的不足,指数项xy的底数x应避免双向取值。基于上述原则,结合非奇异终端滑模面函数,设计了一种新的切换滑模面函数如下 (8) 式中:θ≥0;参数β、p和q与式(2)中定义一致。 由式(8)可知,SS1=SN,因此,令q 为保证式(1)所描述系统的渐进稳定性,滑模存在性条件需要被满足。即 (9) 当x2<θ时,SS=SS2=x1。分以下两种情况进行讨论。 将设计的切换滑模控制策略应用到实际的车载辅助电源上时,其参数p、q、θ需要针对系统要求进行合理设计。否则,本章中的条件A和B不能被满足,系统稳定性无法得到保证。 为进一步将所提出的切换滑模控制策略应用于电动汽车辅助电源系统,先对系统中的Buck变换器进行建模,然后合理地设计切换滑模控制策略所需的限制条件。 辅助电源中Buck变换器的电路如图1所示。Vi是Buck变换器的输入电压;SW表示MOSFET开关;D、L和C分别表示二极管、电感和电容;R是系统输出端等效负载;VR表示系统输出电压。 图1 辅助电源中Buck变换器的电路图 当SW导通时 diL/dt=(Vi-VR)/L (10) dVR/dt=(iL-VR/R)/C (11) 当SW关断时 diL/dt=-VR/L (12) dVR/dt=(iL-VR/R)/C (13) 结合式(10)~式(13),辅助电源中Buck变换器的状态空间模型表示如下 (14) (15) 式中:u是控制因子,满足 (16) 将输出电压误差定义为 x1=VR-Vtarget (17) 式中:Vtarget表示Buck变换器输出电压目标值。 电压误差变化率为 (18) 根据式(14)~式(18),二阶非线性Buck变换器系统微分方程可表述如下 (19) 为确保切换滑模控制策略对辅助电源中Buck变换器系统的有效性,需要对切换滑模控制策略相关参数进行合理设计。限制条件设计如下。 限制条件1q 在限制条件1的基础上,根据条件A和条件B设计其他限制条件保证辅助电源系统的稳定性。 S<0,u=1 (20) S>0,u=0 (21) 对于条件A,将式(17)代入式(20)得 (22) 对于条件B,将式(15)(17)(18)代入式(21)得 (23) 综上,用于辅助电源中Buck变换器的切换滑模控制策略的限制条件可设计为 {q (24) 为证明所设计切换滑模控制策略的有效性,首先在Matlab/Simulink中建立仿真模型。辅助电源中的Buck变换器各参数值见表1。表1中,输入电压Vi=48 V代表电动汽车48 V系统输出电压,通过Buck变换器为12 V系统供电。电感L和电容C的取值通过仿真手段确定[20]。切换滑模控制策略的重要参数设置为:β=0.01,p=5,q=3,θ=5。 表1 Buck变换器参数值 (a)终端滑模控制输出电压响应 (b)切换滑模控制输出电压响应图2 两种滑模控制策略输出电压响应仿真图 辅助电源采用终端滑模和切换滑模控制策略的输出电压响应仿真结果如图2所示。由图2a可见:在上升区间,由于电压误差x1恒不为0,终端滑模控制策略不存在奇异问题,输出电压光滑上升;稳态输出时,电压误差x1=0可能导致终端滑模控制策略的控制量产生奇异点,使其稳态输出电压以约500 kHz的频率波动。相反,由图2b可见,采用切换滑模控制策略的辅助电源稳态输出电压更加光滑。通过仿真对比可知,切换滑模控制策略能有效解决终端滑模控制策略的奇异问题,系统稳定性得到了保证。 图3为非奇异终端滑模和切换滑模控制策略滑模面函数中的输出电压误差变化率x2仿真结果。由图3a可见,非奇异终端滑模控制策略滑模面函数的x2可取正值或负值。相反,由图3b可见,切换滑模控制策略滑模面函数的x2恒为非负值,指数运算电路可得到简化,切换滑模控制策略实现复杂度大大降低。 (a)非奇异终端滑模控制策略 (b)切换滑模控制策略图3 两种滑模控制策略滑模面函数的x2仿真图 为更全面地分析与体现非奇异终端滑模和切换滑模控制策略对非线性辅助电源系统的控制性能与有效性,等效负载设置为非线性变化,将两种控制策略分别对辅助电源进行控制的电压和电流响应作对比。设定等效负载的变化情况为:初始等效负载为10 Ω;然后,卸载20 Ω以证明切换滑模控制策略在卸载情况下的电压鲁棒性;最后,加载40 Ω以证明切换滑模控制策略在加载情况下的电压鲁棒性。仿真对比结果如图4所示。 (a)变负载下辅助电源电流响应 (b)变负载下辅助电源电压响应图4 变负载下采用两种滑模控制策略的 辅助电源电流和电压响应对比 由图4知,采用非奇异终端滑模和切换滑模控制的辅助电源在变负载下拥有几乎相同的电流响应。与非奇异终端滑模控制策略相比,在负载变化时,切换滑模控制策略同样无法避免电压波动,但其卸载情况下的电压波动更小,且电压调节响应速度更快。因此,辅助电源采用切换滑模控制策略时,系统具有更强的鲁棒性和抗干扰能力。 图5 辅助电源切换滑模控制实验台 图6 指数运算电路原理图 (a)非奇异终端滑模控制策略 (b)切换滑模控制策略滑图7 两种滑模控制策略滑模面函数的x2实验波形图 基于所搭建的实验平台,对采用非奇异终端滑模和切换滑模控制策略的Buck变换器的电容电流分别进行采集,进一步得出相应的滑模面函数中的输出电压误差变化率x2的实验数据,其实验波形如图7所示。由图7a和图7b对比可知,当辅助电源输出稳定时,非奇异终端滑模面函数的x2大致在-6至13之间变化,其中当x2负向取值时,控制策略实现复杂度增加。由于切换滑模控制策略的参数θ=5,其切换滑模面函数的x2值始终保持在5以上,因此x2的单向取值使滑模控制策略的实现复杂度得以简化。 (a)启动时传统滑模控制输出电压响应 图8为传统滑模控制和切换滑模控制下的辅助电源的启动电压响应。可以看出,当采用传统滑模控制策略时,辅助电源启动响应时间约为80 ms,其稳态输出电压存在较大误差,无法稳定在Vtarget=12 V处。而采用切换滑模控制策略时,辅助电源输出电压较光滑且误差更小,启动时间约为60 ms。因此,采用切换滑模控制策略时,辅助电源的启动响应时间可缩短25%。 (b)启动时切换滑模控制输出电压响应图8 两种滑模控制策略下辅助电源的启动电压波形图 为验证变负载下切换滑模控制策略的实际控制性能,采用直流电子负载进行连续变负载模拟。Buck变换器的输出电压和电流数据可由ZKE-EBD记录,数据波形如图9所示。由图9a可见,采用传统滑模控制的辅助电源输出电压存在明显波动,辅助电源工作状态不稳定。由图9b可见,切换滑模控制下的辅助电源输出电压更加稳定,系统具有更好的鲁棒性和抗干扰能力。 (a)变负载下传统滑模控制的输出电压和电流响应 (b)变负载下切换滑模控制的输出电压和电流响应图9 变负载下两种滑模控制策略的输出电压和电流响应 在电动汽车辅助电源系统控制中,终端滑模控制策略存在奇异点,输出电压不稳定且策略实现复杂度高,非奇异终端滑模控制策略同样存在策略实现复杂等问题。为提高系统稳定性,降低控制策略实现的复杂度,本文提出了一种新的用于辅助电源Buck变换器的切换滑模控制策略。通过分析终端滑模控制策略和非奇异终端滑模控制策略,描述了其存在的问题。基于非奇异终端滑模控制策略定义了新的切换滑模面函数,并对切换滑模控制系统进行了稳定性分析与讨论。在此基础上,将切换滑模控制策略应用到具体的辅助电源系统中,结合MOSFET开关的导通与关断状态建立了辅助电源中Buck变换器的状态空间模型,并利用Lyapunov稳定性准则合理设计了相应的限制条件,从而保证系统的稳定性。仿真和实验结果表明:辅助电源中的Buck变换器采用切换滑模控制策略不仅可以有效避免奇异问题,还可在降低策略实现复杂度的基础上,获得良好的动态响应和稳定性;与传统滑模控制策略相比,采用切换滑模控制的辅助电源系统,其启动响应时间可缩短25%,系统应对负载突变的能力增强,抗干扰能力及鲁棒性都得到了提高。1.1 终端滑模控制策略
1.2 非奇异终端滑模控制策略

2 切换滑模控制策略设计

3 切换滑模控制策略应用
3.1 辅助电源中的Buck变换器建模
3.2 限制条件设计


4 仿真与实验结果分析







5 结 论
