基于模糊PID控制器的永磁同步电机逆系统解耦控制研究
2018-10-13徐江红王志伟
徐江红,王志伟
基于模糊PID控制器的永磁同步电机逆系统解耦控制研究
徐江红,王志伟
(江苏信息职业技术学院 机电工程学院,江苏 无锡 214153)
传统PID控制器的永磁同步电机(PMSM)逆系统解耦控制策略依然存在着响应速度不快、鲁棒性较差的缺陷。针对这一问题,利用模糊智能算法具有强自适应、强抗干扰能力的优点,设计模糊PID控制器作为闭环控制器和逆系统串接在PMSM系统之前,构成复合控制系统,实现了非线性解耦控制,并利用MATLAB/simulink软件构建了PMSM仿真系统。仿真结果表明,该系统具有良好的动静态特性及系统鲁棒性。
永磁同步电机;逆系统解耦;模糊PID控制;MATLAB仿真
永磁同步电机(PMSM)作为一种性能优越、应用前景广阔的电机,在现今市场经济快速发展、国家边防建设和人民日常生活中的应用都极其广泛[1]。但由于PMSM同样是一种高阶、强耦合以及非线性系统,传统的线性控制方法[2-3](矢量控制、直接转矩控制)在特殊情况下并不能完全体现出PMSM高性能控制的特点,输入与输出耦合及输出的独立控制等问题无法得到有效解决。随着现代电力电子技术和控制理论的发展,将非线性控制理论应用到永磁同步电机控制系统中的研究已取得了较快的进展[4],比如反馈线性化[5]、逆系统方法[6]、无源理论[7]及自抗扰技术[8]等控制的应用,改善了电机的控制性能。其中,应用较多的逆系统方法是利用反馈线性化方法实现多变量、非线性、强耦合系统的线性化解耦,具有简单、直观、易于理解的特点。在PMSM控制系统中能够实现转速响应快速、无超调、精度高的良好控制。但由于逆系统方法是基于精确的数学模型和系统的参数构建的,使得系统的鲁棒性依然较差[6]。
在实际应用中,精确数学模型往往很难获取,因此,需要对PID参数进行实时在线调整,造成系统的控制质量减弱。为了弥补PID控制器在非线性系统应用的不足,文献[9]提出了一种将鲁棒PID与混沌系统相结合控制永磁同步电机的方法,文献[10]提出了一种基于BP神经网络PID的永磁同步电机调速控制方法。
借助于神经网络的自学习、自适应和能够逼近任意非线性函数能力,能够获得良好的动态与静态特性,但存在着初始权值和隐含层数目较难确定的问题。因此,本文提出了将PMSM逆系统模型结合模糊PID控制器构成非线性解耦控制,实现定子电流与电机转速之间的动态解耦,不仅能够避免系统精确数学模型的复杂求解,而且有利于提高系统的响应速度和鲁棒性。
1 PMSM逆系统方法解耦控制
1.1 PMSM数学模型分析
本文的PMSM数学模型建立在以下假设的基础上:①假定铁心无磁饱和,电机运行时电感参数不变,磁路为线性;②忽略铁心涡流、磁滞损耗及温度对绕组电阻的影响;③假定绕组均匀对称分布,产生的感应电动势为正弦分布;④不计空间谐波,认为转子永磁材料的磁导率为0.
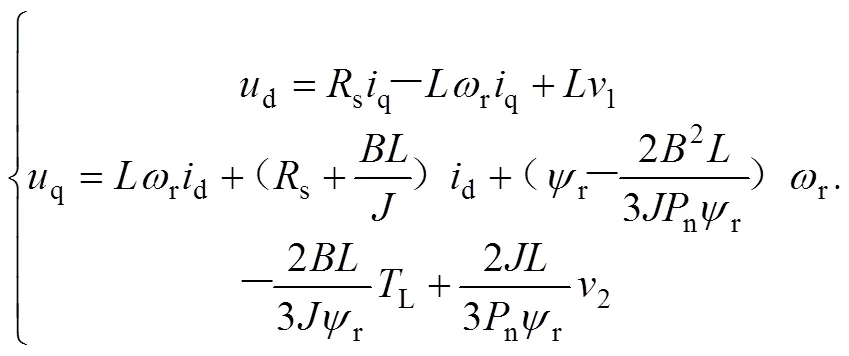
基于上述假设的PMSM系统-轴坐标系下的状态矩阵方程模型为:
式(1)中:s为定子绕组电阻;r为电机转子角速度;d和q为定子绕组轴、轴电压;d和q为定子绕组轴、轴电流;r为转子永磁体产生的磁链;为转动惯量(包括转子转动惯量和负载机械折算的转动惯量);L为负载转矩;n为转子极对数;为阻尼系数;d和q为轴、轴自感,且=d=q.
选取状态变量=[1,2,3]T=[d,q,r]T.
选取输入变量=[1,2]T=[d,q]T.
选取输出变量=[1,2]T=[d,r]T.
由此,得到系统的状态方程为:

1.2 PMSM的可逆性分析
可逆性判断是PMSM逆系统构建的前提,根据一般性多输入输出(MIMO)非线性系统可逆性定理得知,如果非线性系统∑在邻域(0,0)存在向量相对阶,则逆系统存在,并可由状态反馈逆系统来实现输入输出的线性化解耦。因此,在PMSM系统数学模型(1)的基础上将输出=[1,2]T=[d,r]T方程进行求导,直到表达式中有输入=[1,2]T.
具体计算如下:

将其系统放置在PMSM系统前组成伪线性系统。该系统可以等效为2个独立的具有一阶和二阶积分关系的定子电流线性子系统和转速线性子系统,本文通过设计附加线性控制器,实现非线性系统解耦控制,设计的控制结构原理图如图1所示.
2 PMSM模糊PID控制器设计
为了保证PMSM转速和电流线性化动态解耦满足要求,使系统对模型参数及负载扰动具有较强的鲁棒性,采用模糊PID控制器,并与逆系统构成复合控制系统,实现电流与转速的解耦控制。模糊PID结构如图2所示,由模糊推理理论和常规PID控制器相结合构成。

图2 模糊PID控制器的结构示意图
由图2可知,控制器的输入是偏差及其变化率,输出分别为PID控制器的比例系数p、积分系数i及微分系数d.模糊PID控制器的输入偏差及偏差变化率的模糊子集均设计为{NB,NM,NS,ZO,PS,PM,PB},两者的论域表示为{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},输出变量p,i及d的模糊子集可表示为{NB,NM,NS,ZO,PS,PM,PB}。其中,各元素分别表示负大、负中、负小、零、正小、正中、正大。考虑到论域的覆盖程度及灵敏度,本文采用的模糊PID控制器选用三角形隶属函数。模糊PID控制通过实时分析当前的输入偏差及偏差变化率,综合参数整定原则、实际操作经验和控制理论知识得到比例系数p、积分系数i及微分系数d的整定模糊控制表,系数p的模糊控制规则表如表1所示,i及d的整定模糊控制规则表类同省略。
表1 BPMSM的比例系数的模糊控制规则表
ėeNBNMNSZOPSPMPB NBPBPBPMPMPSPSZO NMPBPBPMPMPMPSZO NSPMPMPMPSZONSNM ZOPMPSPSZONSNMNM PSPSPSZONSNSNMNM PMZOZONSNMNMNMNB PBZONSNSNMNMNBNB
通过输入的输入偏差及偏差变化率获得相应的语言值后,查找模糊控制规则表,以得到整定后的3个修正参数,然后进行反模糊化获得精确量,从而计算输出控制量。采用加权平均法进行反模糊化运算,其运算表达式如下:

式(3)中:i为输出取值;i为i的隶属度;0为清晰化输出。
基于以上分析,在Matlab/Simulink仿真环境下通过Fuzzylogic工具箱建立模糊PID控制器构建其仿真模型如图3所示。
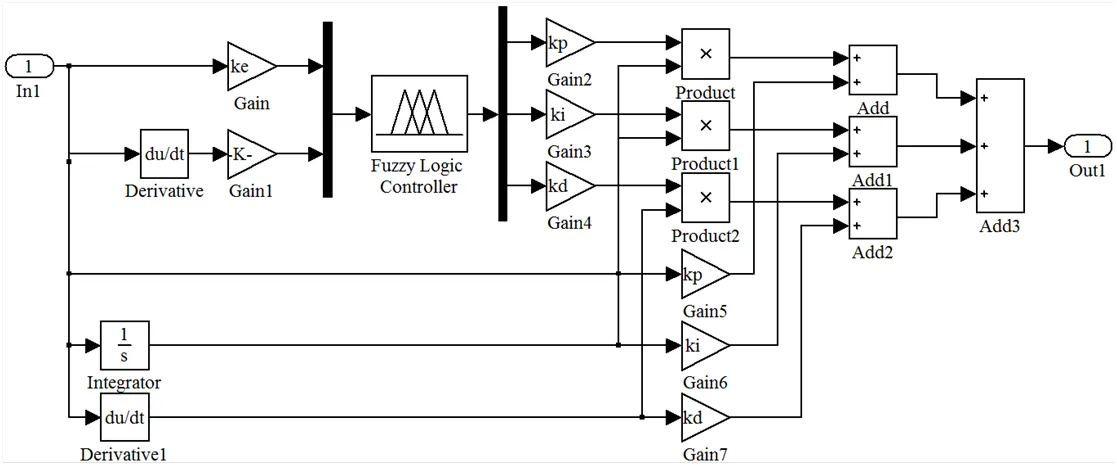
图3 模糊PID控制器仿真模型
3 控制系统仿真及结果分析
在Matlab/Simulink仿真环境下构建仿真模型如图4所示,包括永磁同步电机模型、逆系统、模糊PID控制器。仿真时系统选用变步长ode45求解器,时间为0.08 s,PMSM参数为:额定电压=220 V,转速=3 000 r/min,定子绕组电阻s=2.875 Ω,定子绕组电感=0.008 H,极对数n=2,转动惯量=0.006 kg·m2,阻尼系数=0.005 47 N∙m∙s/rad。为了验证上述非线性解耦系统的控制效果,分别给出了PMSM由空载启动到给定速度和在0.05 s突加3 N∙m负载转矩的输出转矩、定子电流和转速响应曲线,并将其分别与传统PID矢量控制解耦效果、传统PID逆系统方法解耦控制效果进行对比分析。

图4 基于模糊PID控制器的永磁同步电机逆系统解耦控制系统框图
图5所示为PMSM控制系统转矩特性对比图,其中(a)(b)(c)分别为传统PID矢量控制、传统PID逆系统方法控制和基于模糊PID控制器的PMSM逆系统方法控制转矩曲线。从图5中看出,当电机空载启动到给定速度和转矩突变时,传统PID矢量控制的转矩出现较大的脉动,而采用传统PID逆系统方法控制转矩脉动尽管减小了约30%,但仍然需要一定的调整时间。
相比前2种方法,采用模糊PID控制器的逆系统方法控制电机,启动到给定速度时的转矩脉动明显减小并很快衰减,转矩突变时几乎没有脉动出现。由此可看出采用模糊PID控制器的PMSM逆系统方法控制策略时,电机具有更快的动态响应。

图5 PMSM不同控制系统下的转矩特性对比
图6给出了采用3种控制策略时的PMSM定子a相电流波形对比图,其中(a)(b)(c)分别为传统PID矢量控制、传统PID逆系统方法控制和基于模糊PID控制器的PMSM逆系统方法控制a相电流波形曲线。同样从对比分析中可知,采用模糊PID控制器的逆系统方法控制策略时,定子相电流几乎不存在波形畸变,过渡过程更加平稳快速。
PMSM采用3种不同控制系统下转速特性效果如图7所示。当转速达到给定速度时,其中传统PID矢量控制策略转速调节时间约为0.004 s,传统PID逆系统方法的转速动态性能改善并不明显,调节时间约为0.003 s。而本文控制策略转速调节时间降低到0.02 s,几乎无超调量出现。当0.05 s转矩突变时,与前2种控制方法相比,本文控制策略转速调整时间更短,系统响应速度更高。
由上述结果表明,本文设计的控制策略具有更优良的动、静态性能和更好的鲁棒性。
4 结束语
本文提出了一种基于模糊PID控制器的永磁同步电机逆系统解耦控制方法,以改善传统固定增益的PID控制永磁同步电机逆系统解耦控制策略所表现出的鲁棒性不强的缺陷。通过Matlab软件搭建模型仿真表明:将PMSM逆系统模型结合模糊PID控制器构成复合控制系统控制PMSM,能够提高系统的动、静态性能,转速响应更快,转矩的超调得到了有效抑制,获得了更高的精度,满足了更快的响应控制要求。

图6 PMSM不同控制系统下的a相电流波形对比
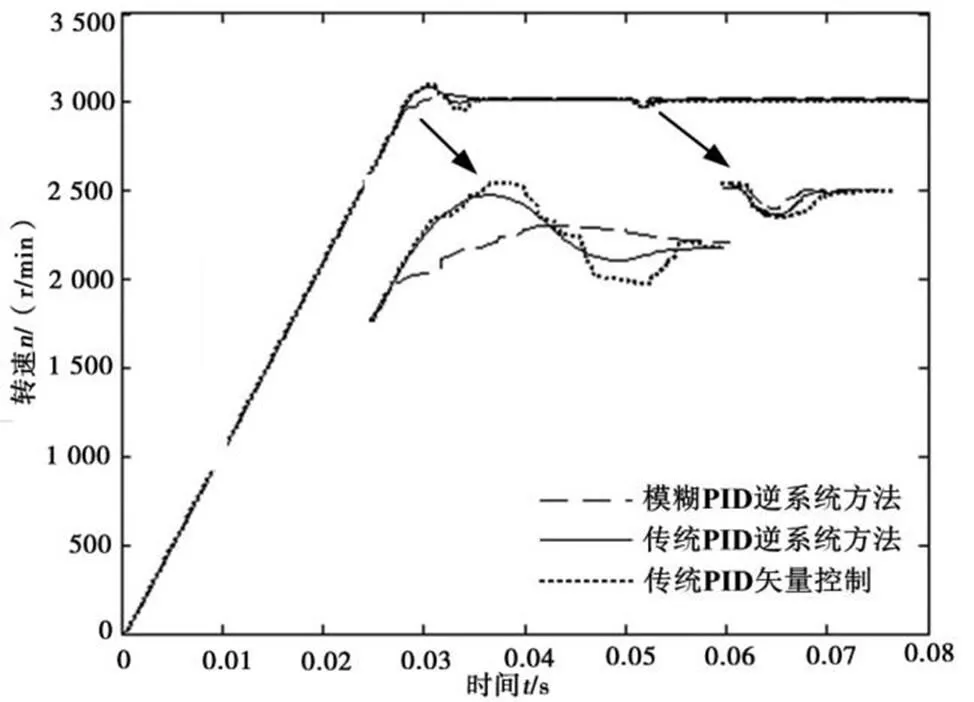
图7 PMSM在3种控制系统下转速特性曲线
[1]张涛,蒋静坪,张国宏.交流永磁同步电机伺服系统的线性化控制[J].中国电机工程学报,2001,21(06):40-43.
[2]Rahman M F,Zhong L,Lim K W,et al.A direct torque controller for permanent magnet synchronous motor drives[J].IEEE Transactions on Energy Conversion,1999,14(03):637-642.
[3]Souad R,Zeroug H.Comparison between direct torque control and vector control of a permanent magnet synchronous motor drive[C]//IEEE International Power Electronics and Motion Control Conference.Poznan,Poland:IEEE,2008:1209-1214.
[4]王久和.交流电动机的非线性控制[M].北京:电子工业出版社,2005.
[5]孟昭君,孙昌志,安跃军,等.状态反馈精确线性化永磁同步电动机转速控制[J].电机与控制学报,2007,11(01):21-24.
[6]李刚,李华德,曹勇.基于逆控制的永磁同步电机速度伺服系统[J].北京科技大学学报,2009,31(04): 511-515.
[7]于海生,王海亮,赵克友.永磁同步电机的哈密顿建模和无源性控制[J].电机与控制学报,2006,10(03):229-233.
[8]盖江涛,黄庆,黄守道.基于模型补偿的永磁同步电机自抗扰控制[J].浙江大学学报(工学版),2014,48(04):581-588.
[9]周世梁,韩璞,刘玉燕.永磁同步电机混沌系统的鲁棒PID控制[J].电机与控制学报,2005,9(06):610-616.
[10]王同旭,马鸿雁,聂沐晗.电梯用永磁同步电机BP神经网络PID调速控制方法的研究[J].电工技术学报,2015,30(01):43-47.
〔编辑:张思楠〕
2095-6835(2018)19-0042-04
TM341
A
10.15913/j.cnki.kjycx.2018.19.042
徐江红(1982—),女,江苏无锡人,硕士,讲师,主要研究方向为自动控制系统的研究与开发。王志伟(1974—),男,江苏无锡人,硕士,副教授/高级工程师,副院长,主要研究方向为自动控制系统的研究与开发。
