DT-1深拖系统的应用现状与优化设计
2018-10-12刘起
刘起
(中海油田服务股份有限公司,天津 300459)
随着我国南海深水油气田勘探开发的逐步展开,对深水井场调查、油气田开发前期勘察能力提出了更高的要求。目前,国内外主流的水下运载平台包括深拖系统(DT)、遥控水下机器人(ROV)及自主航行水下机器人(AUV)。作为商业应用最广,综合效益相对较高的深拖系统依靠母船拖带运动,可以携带各种设备,进行近海底、远距离、长时间的海底地形地貌、浅层地质和海水物理化学等调查。继“大洋一号”Benthos商业级深拖系统之后,中海油服公司又引进了一套额定作业水深3000m的DT-1深拖系统,现已用于南海数个深水井场钻井危机调查作业,作业水深已达到1500m。随着深拖系统的越来越广泛的应用于海洋科学考察与工程作业的情况下,对深拖系统潜器的数据采集和导航定位精确性提出了更高的要求。
本文通过对DT-1深拖系统的南海工程作业的信息数据进行整理分析,结合深拖系统的实际工况对深拖系统的拖体定高运动和导航定位进行了分析。
1 拖体定高运动
DT-1深拖系统数据信息采集的方式是将拖体上集成的各调查设备采集的数据通过中性浮力脐带缆、铠装拖缆及甲板通讯链实时传输至甲板采集处理单元。DT-1深拖系统作业时,拖体距离海底的合理高度通常为50~80m,主要通过调整铠装拖缆的长度和拖曳速度将压载器下沉或提升来实现。
确保深拖系统数据采集的可靠性和准确性的关键在于对拖体运动轨迹的精确控制,其中数据采集的过程中线上拖体的高度影响着深拖系统数据采集的效率以及拖曳设备的安全。线上拖体过高,便无法获得良好的数据;反之如果拖体过低,则追踪覆盖面有限,且碰撞海底的机率会增大。由于拖体并不是独立存在的,在深拖系统作业过程中拖缆对拖体不断施加外力的作用,因此本文以拖体—拖缆为研究整体,基于DT-1深拖系统的不同作业深度的数据,对不同作业深度的拖曳速度和拖缆的释放长度进行分析。
表1为DT-1深拖系统部分参数,表2和图1为DT-1深拖系统在拖体质量一定的前提下,不同作业深度下拖曳速度与拖缆释放长度的对应关系。

表1 DT-1深拖系统参数
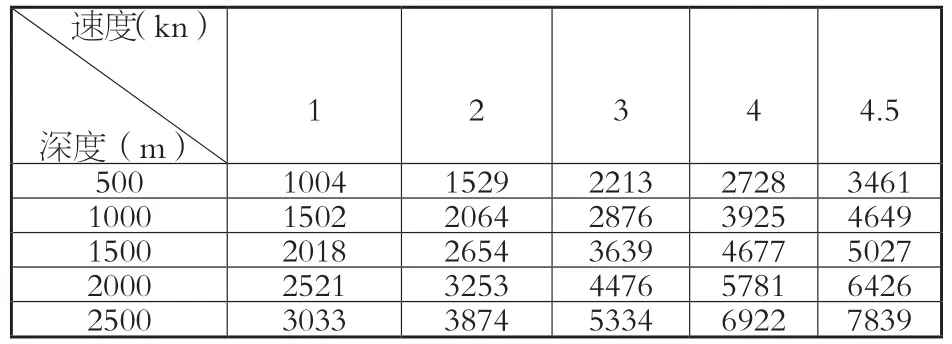
表2 DT-1深拖系统在不同的作业深度和拖曳速度下的拖缆长度

图1 不同作业深度下拖曳速度与释放缆绳长度的关系
通过对DT-1深拖系统在南海不同水深作业时的情况对比分析,如图1所示,拖缆释放长度随着拖曳速度和作业深度的增大呈线性增长趋势。

图2 1000m水深作业时,拖缆释放长度与拖曳速度对应关系图
DT-1南海工程作业中基本上作业深度为1000m,其拖曳速度和缆绳释放长度如图2所示。在2knot以内拖曳速度下拖缆释放长度短,但线上作业时效低,且低速不易保持,会加剧拖曳母船和拖体的偏航,尤其是在表层或底层流速大的情况下,拖体顺流上线显得极其困难。超出3.5knot的拖曳速度下释放的拖缆过长,水中拖体和拖缆承受的流体阻力较大,影响拖体、拖缆的安全性。经过对数据的分析和实际工程实验可知,不同作业深度下拖曳速度控制在2.5knot最佳,同时拖缆的释放长度约为作业水深的2.5倍。
2 导航定位精度
深拖系统的导航定位主要靠超短基线声学定位系统(USBL)结合DGPS导航定位系统的方式实现。USBL声学定位系统通过测量拖体相对调查船的距离和方位角来计算拖体相对调查船的位置,再结合调查船的GPS位置信息换算出拖体在水下的真实位置。在导航定位系统性能一定的情况下,深拖调查导航定位的精度取决于所采用的定位方式(单船定位方式或双船定位方式,其原理如见图3、图4所示)。
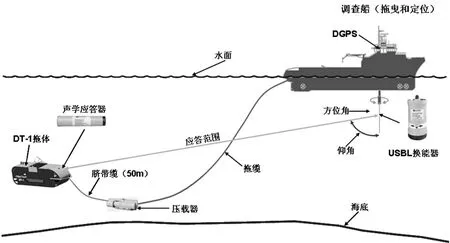
图3 单船定位方式
深拖系统在1000m水深作业时,不同拖拽速度下的拖拽母船水平距离如图5所示。
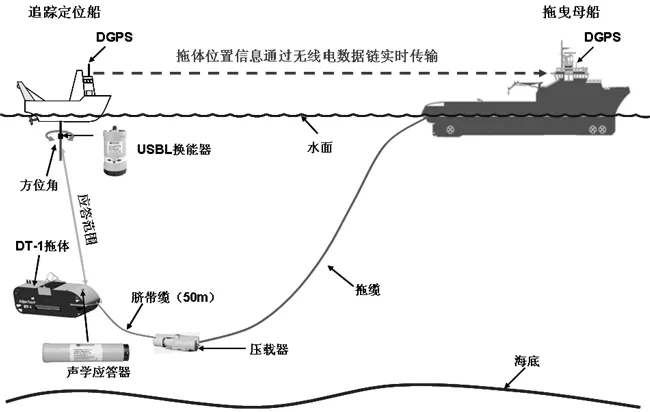
图4 双船定位方式
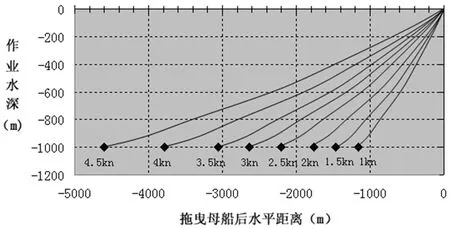
图5 拖体作业深度、拖曳速度及相对水平距离对照图
单船定位方式时,在拖曳速度为2.5节的情况下,其拖缆长度约2500m,拖体距离拖曳母船的水平距离约2200m,USBL换能器与深拖拖体上应答换能器之间通讯声波入射角φ约等于65°,大于60°的通讯声波入射临界角(60°是一般的USBL声学定位系统能可靠定位的通讯声波入射临界角,入射角越小,定位精度越高),定位误差可达到20m左右,远低于理论的定位精度。图6为单船定位作业时的拖体轨迹,可看出拖体位置信息呈“S”型漂移。
而在双船定位方式下,一条追踪定位船,一条深拖拖曳船,安装USBL接收换能器的追踪定位船始终在拖体的正上方的水面航行。这种方式,不仅缩短了USBL换能器与深拖拖体上应答换能器之间的斜距,减少了声学通讯信号反馈时间,而且将这两者之间的声学通讯有效控制在声学覆盖角内。此外,近似0°的入射角将声波在水中的折射影响降到最低,从而提高了距离和方位的测量精度。统计发现,在1000m作业水深时,双船定位误差在5~10m左右,拖体位置信息稳定,如图7。
通过以上分析对比可以看出,较单船定位方式,双船定位方式提高了至少2倍的定位精度。在作业水深达到1000m时,单船定位方式精度低、稳定性差。因此在超过1000m的作业水深进行深拖调查时宜采用双船定位方式。
5 结语

图6 在1000m作业水深时单船定位拖体航迹
深拖系统作为目前主要的深水勘察装备,今后较长的一段时间内会继续发挥其在南海深水油气田勘探开发工程中的重大作用。通过近几年的实际工程应用,我国深拖调查技术已逐渐趋于成熟。本文对深拖系统应用中的关键性问题和数据进行了总结和分析。同时本文提出几点深拖系统作业优化方案,提高了深拖系统的采集数据的稳定性和准确性。

图7 在1000m作业水深时双船定位拖体航迹
