一类差分系统周期解的存在性与特征区间
2018-10-10王炎超赵进
王炎超,赵进
(河海大学理学院,江苏 南京 210098)
1 引言
在过去的20年里,差分系统周期解的存在性问题一直备受关注.例如,文献[1]研究了如下高阶非线性差分系统的周期解:

其中对任意的i∈Z,ri是实数,Γ是非负整数,

其中 m 是正整数,对给定的正整数 T,f(k,YΓ,···,Y0,···,Y−Γ)对 k是 T-周期的.最近,文献[2]研究了如下二阶非线性差分系统周期解的存在性问题:

另外,还有许多其它关于差分系统的经典著作,读者可以参考文献[3-6].
本文的目的是研究如下非线性差分系统周期正解的存在性问题:

其中

对于 j=1,2,···,k,a(n)是T-周期的,fj(n,x):Z×Rk→R关于x连续且关于n是 T-周期的,T≥1是整数.
众所周知,系统(1.1)在许多科学领域中都有着广泛的应用.例如,它作为人口动力学模型被大量研究.其中,文献[7]基于一锥不动点定理证明了当非线性项F(n,x)的每一个分量都取正值时,系统(1.1)存在周期正解.此外,还研究了如下系统的特征值问题:

其中

λ>0是一个正参数.对此类边值问题特征区间的刻画一直以来都是一个经典问题.请参考文献[8-13].
本文将应用锥不动点定理继续研究系统(1.1).与上述工作比较,在一个合适的锥下,我们推广并改善了文献[7]中的结论.创新之处如下:
(1)不要求F(n,x)的所有分量都是正的.
(2)可以用一个简单的方法刻画(1.2)式的特征区间.
为了选择一个合适的锥,我们介绍以下内容.给定x,y∈RN,通常的标量内积被记作(x,y).给定向量v∈RN+,用X 表示所有T-周期的连续函数x:Z→Rk构成的空间,范数取
其中

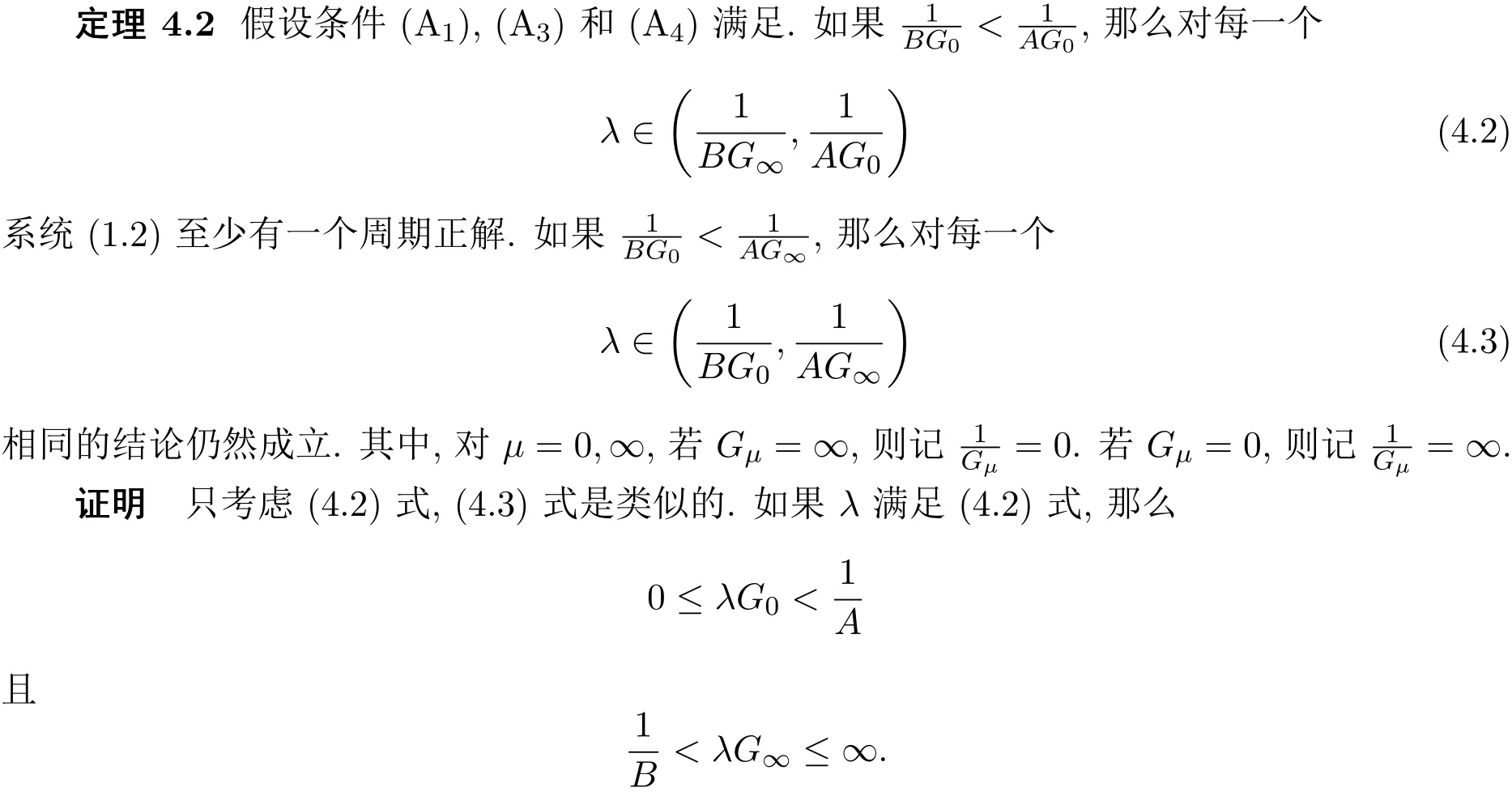
那么易知 X 是一个 Banach空间.对任意的 n,θ∈Z,如果 x∈X,那么 xn∈X 被记作 xn(θ)=x(n+θ).另外,对 a,b∈ Z 和 a 为了方便起见,列出下面条件: (A1)∀n∈[0,T−1],有0 (A2)对任意的L>0和 ε>0,存在δ>0,使得若 则 为了陈述得出的主要结果,本章将给出一些预备知识. 定理 2.1[14]设X是一个Banach空间,K是X中的一个锥.假设Ω1,Ω1是X的两个有界开子集,满足 若 是一个全连续算子并且满足: (i) 对任意 x∈ ∂KΩ1(∂KΩ= ∂Ω∩K),有 ∥Tx∥ ≤ ∥x∥; (ii)存在 e∈K{0}使得对所有的 x∈∂KΩ2和任意的 λ>0,有 x̸=Tx+λe,则 T在中有一个不动点. 引理 2.1[7]假设 (A1)满足,那么对每一个j=1,2,···,k,xj(n)是如下方程的解: 当且仅当 其中 注 2.1 容易发现对任意的(n,u)∈Z2,有 为了定义所期望的锥,注意到对任意u∈[n,n+T−1],有 K={x∈X:(v,x(n))≥0,n∈Z,(v,x(n))≥σ|x|v}. 容易证明 K是 X中的一个锥.此外,令 T:K → X是一个映射且由如下分量组成 (T1,T2,···,Tk),其中 Tj定义如下: 这里G(n,u)已由(2.1)式给出. 引理 2.2假设(A1)和(A2)都成立,那么T是全连续的并且是从K映到K的. 证明 由于(A2)满足,容易验证T是全连续的.此外,F和a(n)的周期性保证了 这表明 (1.1)式的解是周期的.接下来,证明T从K 映到K.事实上,如果x∈K,从(A1)和(2.3)式很容易得到 此外,利用(2.2)式,有 因此 这表明T(K)⊂K. 在这一节,将证明系统(1.1)存在周期正解.首先,将文献[15-16]中提出的思想推广到离散情形. 给定常数r>0,定义开集 和 引理 3.1上述定义的Ωr,Br具有如下性质: (c)如果x∈∂KΩr,那么σr≤(v,x(n))≤r,n∈[0,T−1]. 则有|x|v 因此|x|v<δ,这意味着x∈(Ωr∩Bδ)∩K.另一方面,因为 (a)成立,所以有因此.类似可证明相反的包含关系. 注 3.1 由于对任意的 r>0,Ωr是无界集,所以不能直接应用定理2.1.但是,因为(d)成立,我们可以借助去运用定理2.1. 定理 3.1 假设(A1),(A2)成立.此外,如果存在一个向量使得下面两个条件成立: (B1)存在常数α>0和连续函数ψ:Z→(0,∞)使得 并且 (B2)存在常数β>0和连续函数χ:[0,T−1]→(0,∞)使得 并且 那么,下面结论满足. (D1)如果β<σα,那么问题(1.1)至少含有一个周期正解x满足 (D2)如果α<β,那么问题(1.1)至少含有一个周期正解 x满足 证明 为了应用定理2.1,说明: (i)对任意的 x∈∂KBβ,有|Tx|v≤|x|v; (ii)存在 e∈K{0}使得对所有的 x∈∂KΩα和任意的 λ>0,有x̸=Tx+λe.从(i)开始.对任意的x∈∂KBβ,有|x|v=β.那么从 (B2)可得到 这表面 (i)成立.下面考虑 (ii).假设 e(t)≡(1,1,···,1)T,那么 e∈K{0}.若存在 x∈∂KΩα和λ>0使得x=Tx+λe,那么可以从引理3.1(c)得到 因此由(B1)知道 这与上述陈述矛盾.因此(ii)满足.现在假设β<σα,那么可以从引理3.1(b)得到 这一节,将应用定理3.1去刻画系统(1.2)的特征区间.首先,考虑下述差分系统: 其中 进一步假设: (A3)gj:Rk→R 是连续函数,且当 |x|v>0时,有 (v,G(x))>0,j=1,2,···,k. (A4)h(n):Z→R+是连续函数且满足 定理 4.1假设条件(A1),(A3)和(A4)都成立.如果下面条件有一个成立: 其中 并且 那么系统(4.1)至少有一个正解x满足对任意 n∈[0,T−1],有x(n)̸≡0. 证明 应用定理3.1,此时 假设 (C1)成立.那么(C2)成立的情形是类似的.由 (C1)的前半部分可知存在 β>0,使得对 0<|x|v< β,有 (v,G(x))≤ A−1β.取 χ(n)=A−1h(n),那么对任意的 n∈[0,T−1]和 0<(v,x)≤ β,有 此外,有 这表明(B2)满足.由条件 (C1)的后半部分可知存在α>0使得对(v,x)≥σα,有σα>β且 (v,G(x))≥β−1σα.取 ψ(n)=B−1h(n),那么对任意的 n∈[0,T−1]和 σα<(v,x)≤α,有 同时,有 因此条件(B1)满足.由定理3.1可直接得到结论. 现在刻画系统(1.2)的特征区间. 因此可以直接应用定理4.1. 致谢 真诚感谢储继锋教授长期以来的指导和支持.

2 预备知识











3 主要结果














4 系统 1.2的特征区间