自动驾驶分级方法及测试技术
2018-10-10石娟田晓笛王建培
石娟 田晓笛 王建培
(中国汽车技术研究中心有限公司)
高级辅助驾驶系统(ADAS)的发展已有十余年历史,谷歌、百度、华为和乐视等互联网公司也纷纷开始转向自动驾驶的研发。中国在自动驾驶方面发展较晚,但正在加紧赶超,《中国制造2025》将智能网联汽车作为重点发展方向[1]。目前,一些权威机构已将自动驾驶技术进行了分级,如何有效地进行自动驾驶系统的评价将会是未来政府层面关注的焦点。相比于传统系统,实车道路试验方法已不能覆盖所有的测试场景。主机厂和互联网企业大多在开展虚拟测试技术的研究。基于以上问题,文章分析了不同的自动驾驶分级方法,提出控制系统硬件在环(HIL)测试、车辆在环(VIL)测试和实车道路测试相结合的一整套测试评价方案。
1 自动驾驶分级标准对比分析
2013年,NHTSA(美国国家公路交通安全管理局)率先发布了自动驾驶汽车的分级标准,将汽车的自动化分为特定功能自动化、部分自动化、有条件自动化、完全自动化4级。SAE(美国汽车工程师协会)于2014年在NHTSA的自动驾驶汽车分级标准的基础上发布了SAE J3016标准。这2个标准在某种程度上有一定的相似之处,都是依据汽车本身能否控制一些关键的驾驶功能来区分自动驾驶和非自动驾驶。但是,SAE对自动驾驶的分级说明更为详细,所以其在世界范围内的应用更广,美国政府更是把SAE制定的自动驾驶分级标准作为自动驾驶联邦指导方针中的公认标准。
SAE[1]制定的自动驾驶分级标准中将自动驾驶技术分为0~5级,分别对应无自动驾驶、驾驶员辅助、部分自动驾驶、特定条件下自动驾驶、高度自动驾驶以及完全自动驾驶。其中,0级系统是完全由驾驶员进行驾驶,为了提高系统的主动安全性,配备有LDW(车道偏离预警)、FCW(前向碰撞预警)、BSD(盲点检测功能)及TSR(交通标志识别)等报警系统,车辆控制、环境监测和系统回应的主体都是驾驶员;1级系统可以辅助驾驶员完成某些驾驶任务,比如现在许多车上搭载的自适应巡航系统(ACC)便能辅助驾驶员实现车辆的纵向运动控制,车道保持系统(LKA)可以通过控制电子转向系统辅助驾驶员对车辆的横向运动进行控制;2级系统可以同时对车辆进行横向和纵向控制,比如泊车辅助系统,在此级别中驾驶员需要监测周围环境,在系统做出错误判断时能够及时纠正系统并接管系统;3级系统是有条件的自动驾驶,系统能代替驾驶员完成某些驾驶任务并完成部分环境监测功能,但驾驶员需要在系统发出请求时及时重获驾驶控制权;4级系统是高度的自动驾驶,车辆控制、环境监测和系统回应的主体都是系统,但也有驾驶员控制车辆的模式;5级系统是完全自动驾驶,即实现无人驾驶。SAE除了对每级对应的详细功能进行了描述,还着重强调了动态驾驶这一分级指标,通过对动态驾驶任务的执行者进行分别定义,细化了自动驾驶汽车的智能程度。
德国联邦公路研究所(BASt)将自动驾驶技术的发展划分为5个阶段[2]:只有驾驶员控制车辆、驾驶辅助、部分自动驾驶、高度自动驾驶以及完全自动驾驶,分别对应SAE标准的第0~5阶段。该标准描述了汽车在不同自动化级别时可能产生的法律后果,便于自动化法规制定的引用。
为了弥补国内在自动驾驶分级定义标准方面的缺失,中国汽车工程学会提出了中国第1版自动驾驶分级定义标准。其中,将汽车的自动化等级分为驾驶辅助、部分自动化、有条件自动化、高度自动化及完全自动化5级,并对每一级别适用的工况进行了详细说明。与国外自定的自动驾驶分级标准的不同之处在于,中国汽车工程学会还对汽车的网联化进行了分级,强调了网联技术在自动驾驶领域的应用。
目前,国内外许多主机厂开始打破传统思维,转向智能网联汽车的研究。国内主机厂从第0级开始逐步研究,相比来说,国外主机厂起步比较快,部分主机厂已经能做到第1级和第2级。从第1级到第2级过渡的难点在于控制策略的选取,以及不同传感器的融合控制。如何将现有不同传感器感知的信息进行筛选,同时对车辆进行横向和纵向的控制,都是当前需要解决的问题,各主机厂还有很长的路要走。相比于传统主机厂,一些互联网公司(如谷歌、百度等)在控制策略和高精度地图等方面有较大的优势,通过与传统主机厂的合作,基本策略可以达到第4级[3-4]。
2 硬件在环测试技术
2.1 硬件在环测试技术介绍
硬件在环(HIL)测试技术是指在测试车辆控制器的功能时,用虚拟车辆节点代替车辆环境,给控制器创造类似在真实车辆上运行的环境,整车动力学完全用动力学模型来代替,从而可以测试控制器的各种功能及逻辑是否正确。在整车开发的过程中,针对比较极限的工况,实际道路试验很难进行测试,而HIL测试则可以高速有效地进行危险工况的验证,且重复性高。
2.2 自动驾驶系统硬件在环测试技术
目前随着ADAS和自动驾驶等技术的发展,HIL测试再一次被重视起来。相比传统车辆控制器测试,ADAS系统控制器需要测试的工况更多,并且还需要实际交通环境,因此虚拟环境的搭建是整个ADAS或自动驾驶测试的基础并贯穿于整个测试阶段。目前国内外进行虚拟环境仿真的软件主要有IPG公司的Carmaker、TASS公司的PreScan及OKTAL公司的Scanner等。仿真软件具有多种传感器模型,如毫米波雷达、激光雷达及摄像头等,这些传感器可以代替实际控制器的感知传感器[5]。为仿真实际交通环境,仿真软件中有多种常见的交通流元素,例如行人、车辆、建筑物及道路等,这些交通元素可以构建虚拟测试环境,通过传感器模型将虚拟目标传递给控制系统,从而测试控制系统的控制功能是否正确。图1示出目前常见的基于摄像头的HIL测试系统,一般采用让摄像头看屏幕的形式进行测试,其优点是可以快速可重复地进行测试,缺点是屏幕呈现的是二维图片,摄像头在看屏幕的时候与真实环境存在误差。为了解决这一问题,可采用视频流注入或目标信号注入的方法完成测试。

图1 基于摄像头的硬件在环测试系统
基于雷达的控制系统可以采用雷达目标仿真器的形式模拟虚拟测试目标,但根据目前的技术水平,雷达目标仿真器只有RS的OTA(over the air)和NI的目标仿真器,可仿真的目标数量有限(4个左右)。图2示出基于雷达的ADAS控制器在环测试系统的示意图[6],其同样可以采用雷达模型和目标信号注入的方式进行测试。
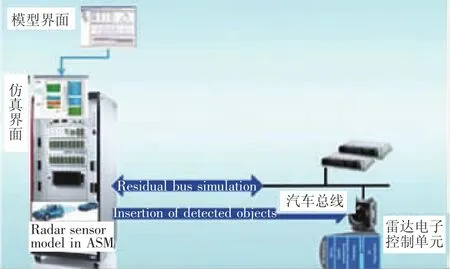
图2 基于雷达的ADAS控制器在环测试系统
针对自动驾驶系统,单一传感器已经不能满足控制系统的需要,需要通过多传感器融合的方式来监控驾驶环境。目前比较典型的方案是摄像头和毫米波雷达的融合方案,融合方案的虚拟测试的关键问题是实现多种传感器目标信号的同步。目前比较主流的方案是摄像头采用看屏幕的形式,同时将虚拟场景传递给雷达目标仿真器,以此来保证不同传感器的时间同步。图3示出摄像头和毫米波雷达融合方案示意图[6]。
2.3 硬件在环测试方法优缺点
HIL测试的优点为:1)可实现自动化测试,测试效率高;2)针对ADAS或自动驾驶系统,可以采用虚拟场景的方法,测试工况覆盖更全,特别是一些极限场景,实际道路试验存在很大的危险性,而HIL测试更为安全。
HIL测试的缺点为:1)只能测试ADAS系统或是自动驾驶系统的功能,在动力学模型不精确的情况下,很难测试系统的性能,比如HIL系统只能测试自动紧急制动系统(AEB)是否制动,而不能测试系统制动后与前车的距离;2)进行HIL试验时,传感器一般是完全或部分屏蔽掉,相较于实际道路,传感器的部分性能不能测试。
3 车辆在环测试技术
3.1 车辆在环测试技术介绍
车辆在环(VIL)是真实车辆在实际道路上行驶,传感器感知到的周围环境是虚拟的一种测试方法。VIL测试技术是随着ADAS的测试需要出现的新测试技术。相比传统车辆控制器,ADAS或自动驾驶控制器除了需要车辆网络环境,交通环境也是其不可缺少的一部分。
3.2 自动驾驶车辆在环测试技术
按照目标信号的注入方式,仿真测试主要有目标注入、传感器原始信号注入及传感器在环3种形式。其中目标注入是将目标信号直接输入给控制器的控制层,在系统中执行控制策略部分;传感器原始信号注入是将传感器探测到的信号直接输入给传感器,在系统中执行传感器目标识别和功能控制部分;以摄像头为例,传感器在环即看屏幕的形式,系统部分执行传感器环境感知、目标识别和功能控制部分,目前主要用于测试自动泊车辅助系统(APA)及AEB等工作系统。比较成熟的测试有基于超声波传感器的APA测试系统,其将虚拟测试环境中的目标信息通过超声波仿真器传递给超声波传感器,实现在实际场地中,采用虚拟测试环境的形式开展试验。
3.3 车辆在环测试方案优缺点
VIL测试的优点为:1)与HIL测试相比,提高了被测控制器性能测试结果的精确度;2)与实车测试相比,减少了测试时间,降低了试验难度和风险,增强了试验的复现性,节约了实车测试中因变换不同场景而消耗的成本。
VIL测试的缺点为:1)测试效率比HIL测试低;2)在产品开发前期,车型没有固定,只有在后期才可开展;3)需要较大的试验场地。
4 实车测试技术
4.1 封闭区实车测试技术
目前海外独立的智能车和自动驾驶测试场大约有8家。其中,欧洲有3家(瑞典的AstaZero、英国的Mira、西班牙的IDIADA);美国有3家(密歇根大学的M-City、密歇根州在建的ACM、加州的Gomentum);韩国有1家K-City在建;日本则是由JARI在建。
瑞典的AstaZero占地约200万m2。测试场分4个测试区,如图4所示,最外圈为乡村道路测试区,中间为高速测试区,右下角为城镇测试区及高速测试区右边的多车道测试区。

图4 瑞典AstaZero自动驾驶测试区分布图
M-City是全美第1个智能网联汽车封闭试验场,建筑面积约为13万m2,公路长约8 km,最长直线道路约400 m。在智能网联汽车技术应用于实际道路之前,M-City可以提供安全可靠的模拟测试环境,用于传感器和整车控制算法测试。
4.2 公开道路实车测试技术
谷歌于2009年开始进行无人驾驶实车测试,其无人驾驶汽车的总里程已超200万英里,约合322万km。2012年美国内华达州机动车辆管理部门为谷歌的自动驾驶汽车颁发了首例驾驶许可证,这使谷歌无人驾驶公开道路测试成为合法测试。谷歌的无人驾驶汽车通过照相机和雷达感应器等感知车辆周围环境,并使用高精地图来为车辆进行前方道路导航,但车辆在极端恶劣天气下容易出现传感器失效等问题,导致其不能对周围环境做出准确的判断。
百度于2017年公布Apollo计划,并公开了一段无人驾驶汽车的路测视频,但由于国内目前没有允许无人驾驶汽车上路的法律法规,所以百度此次的无人驾驶实车测试引起了较大的争议。
5 结语
文章从对不同国家、不同机构制定的自动驾驶分级方法的分析比较入手,主要分析了SAE、NHTSA、BASt及中国汽车工程学会4家机构对自动驾驶等级划分的原则和特点;从HIL和VIL的角度介绍了典型的测试技术应用方案并分析了各自的优缺点;介绍了典型的封闭区和开放道路实车测试技术。文章涵盖了控制器“V”模型开发流程(包括整车级需求、部件级需求、HIL验证、VIL验证及实车验证)的各个测试阶段。
目前,国内外已经有很多自动驾驶的测试在开展,而且这种测试会越来越频繁,但现在它还局限在较窄的区域内,未来将扩展到公众区域,如同公交车道一样,慢慢扩展到城市道路,最终扩展到所有的高速公路。这会是一个漫长的过程,需要不断尝试、不断磨合,也需要大众克服过去的使用习惯的障碍及法律的障碍。