ADAS 技术的研究
2018-10-10
1 前言
先进驾驶辅助系统(ADAS)使用安装在车辆上的各种传感器从车辆内部和外部收集环境数据,并识别和检测静态和动态对象,使驾驶员能够在最快的时间内意识到可能发生的危险,提高主动安全技术的安全性。其中目标检测、道路标志识别、自动驾驶状态估计、目标定位等是智能驾驶辅助系统(ADAS)和自动驾驶的关键。
2 目标检测技术的研究[1]
开发智能驾驶辅助系统(ADAS)和自动驾驶、实时稳定的行车目标检测是汽车环境感知的关键模块之一。利用多传感器融合(如摄像头、毫米波雷达、激光雷达等)可准确、完整地获取目标信息。毫米波雷达在恶劣天气条件下可以提供相对较高的距离和速度分辨率,但其视场有限、横向分辨率低、无法识别目标类型。然而,摄像头可以提供准确的目标类型,但障碍物距离估计精度较低,若将二者的数据进行融合,则可提供更准确、完整的目标信息,提高环境感知性能。
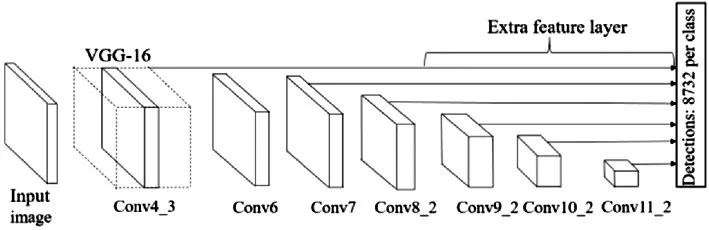
图1 SSD模型结构[1]
作者Yu提出一种基于卡尔曼滤波和贝叶斯估计相结合的目标检测方法,具体步骤如下:
(1)利用SSD(Single Shot MultiBox Detector)算法对摄像头所捕获图像中的目标进行检测,得到目标的类型和边界(图1)。SSD方法基于卷积网络(CNN),其模型结构主要包括基础网络、用于检测的多尺度特征图、用于检测的卷积预测器、默认边界和长宽比。
(2)利用坐标变换矩阵统一摄像头与雷达的坐标系。相关坐标系包括世界坐标系、雷达坐标系、摄像头坐标系和图像像素坐标系,其中世界坐标系原点位置与雷达坐标系原点位置一致。
(3)利用卡尔曼滤波对雷达和摄像头检测到的目标进行跟踪,以降低测量噪声。
(4)基于贝叶斯估计计算融合权重,根据融合权重和跟踪结果对目标数据进行融合。
设计仿真实验来测试和优化所提方法,仿真实验中,目标类型是行人和车辆,目标的动力学模型为CV模型,目标的横、纵向距离是融合数据。实验表明,卡尔曼滤波可以显著降低测量噪声,且融合算法可以提高估计精度。
3 道路标志识别系统技术的研究[2]
标志识别在智能交通、智能汽车自主驾驶等领域有着重要的应用,对道路标志进行准确的检测和识别,可以减少事故发生的可能性,确保行车安全(图2)。

图2 训练图集
作者Wang设计了一种基于OPSA点集距离和小波变换的道路标志识别方法,以提高辅助驾驶系统和无人驾驶安全。该方法主要包括三个阶段:
(1)图像去噪、恢复。采用中值滤波器对图像进行去噪。中值滤波是一种非线性平滑技术,它将每个像素的灰度值设置为该点附近窗口内所有像素灰度值的中值,可以克服线性滤波产生的图像模糊,有助于消除噪声和脉冲干扰。中值滤波使用带有奇数个点的滑动窗口来去除噪声,不同图像与不同要求时需要选择不同的窗口大小和形状。
(2)特征提取。特征提取是指从一组特征中选取一些最有效的特征,以达到缩小特征空间尺寸的目的。在特征提取阶段,采用基于小波变换的特征提取识别方法,小波反映信号的细节,大尺度小波反映信号的轮廓,克服了传统傅里叶特征提取方法的不足,保证了高频信息不丢失,低频信息不丢失。其中,对于二维图像数据,将每一层小波变换分解为图像的四个部分,分别表示近似低频、垂直高频、水平高频和对角高频部分的图像。
(3)图像识别。使用多个地标图像来创建一个训练集图像库,对所有图像进行分解,并将低频小波系数生成的图像保存为特征图像,创建特征图像库。然后,使用OPSA点集距离来识别图像。
该方法实现了道路标志的精确识别,且具有较强的鲁棒性,对驾驶辅助系统的研究具有一定的指导意义。
4 目标车辆状态估计技术的研究[3]
前车检测与跟踪作为自主车辆环境感知系统的关键环节,在自主车辆环境感知系统中起着重要的作用。然而,目标车辆的一些关键状态在所有驾驶情况下都难以直接准确地测量。
作者Li研究了一种利用摄像头、激光雷达等多台主机车辆传感器收集的信息来估计目标车辆状态的方法。具体步骤如下:
(1)建立一种基于Serret-Frenet方程的车辆动力学模型,用于解释目标车辆的横向运动。基于Serret-Frenet公式,在参考曲线上建立Serret-Frenet坐标系。前车的横向状态(如横向速度、偏航角等)不能直接准确地得到,但是传感器可以得到与车辆横向状态密切相关的可用状态和测量值,从而估计车辆的横向状态。其中,车辆横向运动模型及道路约束信息如图3所示:
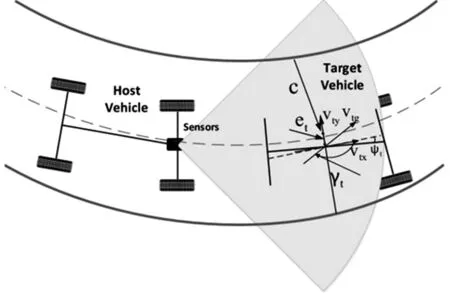
图3 车辆横向运动模型及道路约束信息
(2)在道路测量约束和车辆运动学模型的基础上,设计神经网络观测器估计下一时刻车辆的横向状态。建立车辆横向动力学状态时间序列与道路约束的非线性映射关系,选择目标车辆对道路中心线的侧向偏移量、相对航向角、道路中心线和道路参考曲率作为神经网络的输入。采用贝叶斯正则化反向传播训练算法对目标车辆的横向速度、偏航角和侧偏角进行建模,调整权值以使真实值与神经网络估计输出值之间的误差最小化。在Levenberg-Marquardt中加入贝叶斯正则化可以进一步提高RNN神经网络的泛化性能。
在dSPACE实时计算机上进行CarSim/Simulink联合仿真,验证该方法的有效性。将改进的递归神经网络估计方法与卡尔曼滤波和前馈神经网络方法进行比较,可知神经网络观测器对目标车辆状态的估计更为准确。因而,该方法对更好地识别自动驾驶中目标车辆行为有一定的指导意义。
5 车载雷达目标定位技术的研究[4]
毫米波车载雷达是智能驾驶辅助系统(ADAS)和自主驾驶系统中最重要的传感器之一,该装置通过处理发射信号和回波信号来检测汽车周围的目标车辆。由于基于奈奎斯特采样原理的雷达信号处理方法的采样率过高,范围、速度和方位角的分辨率不能满足高度自主驾驶的要求,尤其是方位角的要求。在空间域内,目标在车载雷达探测范围内呈稀疏分布。针对这些问题,本章提出一种基于压缩感知的车载雷达目标定位算法。
车载雷达如图4所示,为了提高当前车载雷达的角度测量精度,采用了雷达天线的多输入多输出(MI⁃MO)结构。考虑车载雷达探测区域的距离-速度-方位联合估计模型,基于目标在整个空间的稀疏分布图,在估计目标的距离和速度时,将整个空间除以距离-速度网格。空间中不同的目标对应着距离-速度平面上不同的网格点。同时,估计目标的距离、速度和方位角时,还需要考虑方位角方向的维数,因此整个空间划分网格离散化。为了得到稀疏的值列矩阵,采用稀疏的自适应匹配追踪算法以重建信号与接收压缩信号。
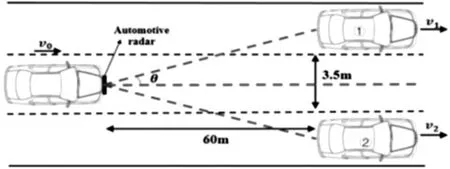
图4 车载雷达场景
与传统的雷达算法相比,该算法提高了目标的距离分辨能力和对相邻目标的识别能力。在方位角估计方面,与MUSIC(多重信号分类)算法相比,压缩感知能够获得更好的角度分辨率。
6 结束语
智能驾驶辅助系统(ADAS)是当前的研究热点,基于相关技术解决了目标检测、道路标志识别、自动驾驶状态估计、目标定位等问题才更有助于ADAS技术的进一步发展。