便携式水果采摘器的设计
2018-10-09黄佳生卢清华邹家勤
黄佳生,卢清华,邹家勤
(佛山科学技术学院机电工程学院,广东佛山 528200)
目前果园的采摘主要有两种形式:一种是机械全自动采摘[1];一种是机械辅助半自动采摘[2]。机械全自动采摘即采用机器人对果园果树进行自动采摘。由于我国南方地区的果园多数处于丘陵地带,地面崎岖不平,地势起伏,环境的复杂性高,使得其不适合利用机器人进行采摘工作,同时也考虑到采摘效率及经济性等问题,因而目前南方地区多数果园采用机械辅助半自动采摘的方式进行采摘。
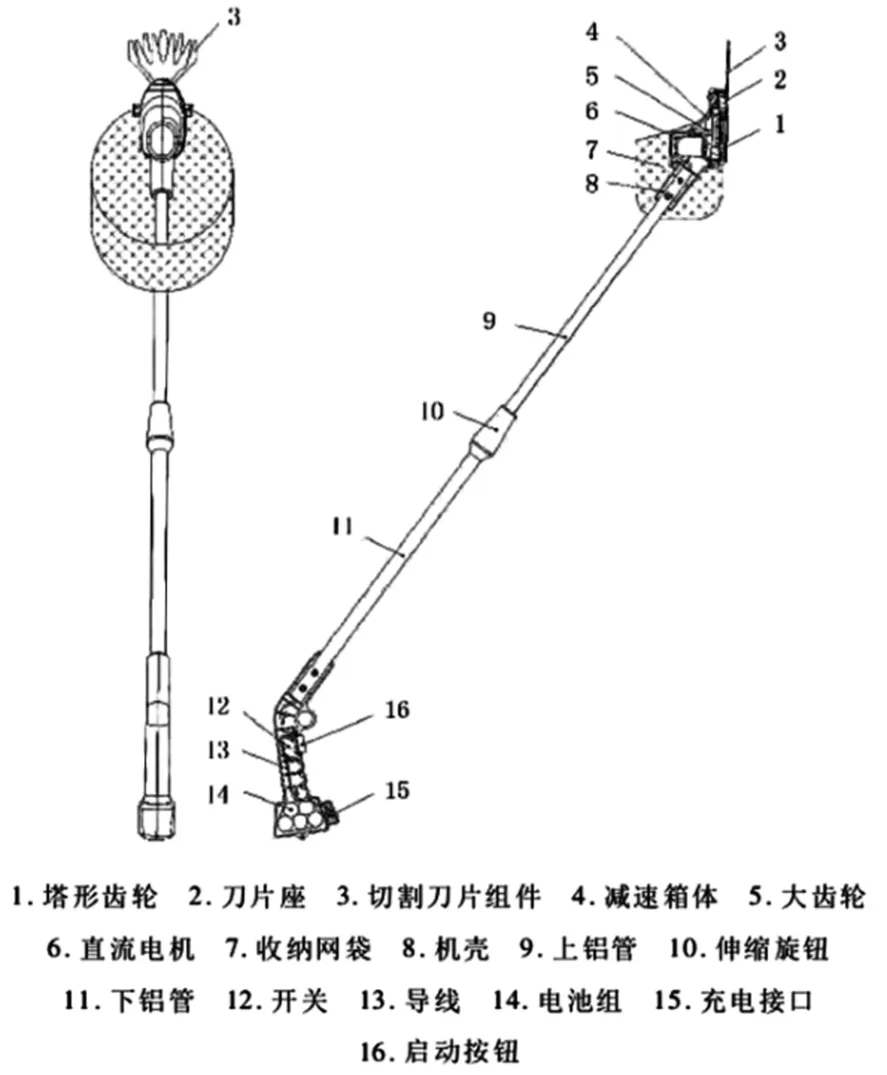
图1 一种轻型枇杷采摘器
1 机械辅助半自动采摘的研究情况
机械辅助半自动采摘即人与采摘机械配合进行相应的采摘任务。目前,采摘机械主要可以分为电动式采摘机械和机械式采摘机械两大类。
(1)电动式采摘机械一般采用微型直流电机和电磁吸盘作为驱动装置。如:赵亚平等[3]研制一种轻型枇杷采摘器(图1),采用微型直流电机作为驱动,通过两级齿轮减速箱的减速,再将动力传递给偏心机构,实现采摘切割装置中动刀片的往复运动,从而将枇杷的茎部剪断。马质璞等[4]利用电磁通电产生吸力的特点,设计一种新型单果采摘器(图2),该采摘器由电磁剪刀结构、伸缩杆和收集网3个部分组成,通过开关装置控制电磁剪刀结构中电磁吸盘的通电与断电,对铁块产生吸引,带动剪刀的闭合,完成剪切的采摘动作。
(2)机械式采摘机械通过绳或连杆等将驱动力传递到采摘机械的末端,驱动剪切装置,进行剪切。如:陈燕等[5]研制一种纯人力控制的荔枝采摘器(图3),利用一个导向机构将枝叶拨开,定刀片钩住果梗,再扳动手柄,使得动刀片旋转将果梗切断,果实落入导向机构中,沿果道滑下。张健等[6]设计一种芒果采摘机械手(图4),能对芒果进行分级采摘。采摘机械末端采用一个U型槽的结构,通过其来判断果实是否达到采摘的要求。当果实符合采摘要求时,果柄落入U型槽后实施剪切。
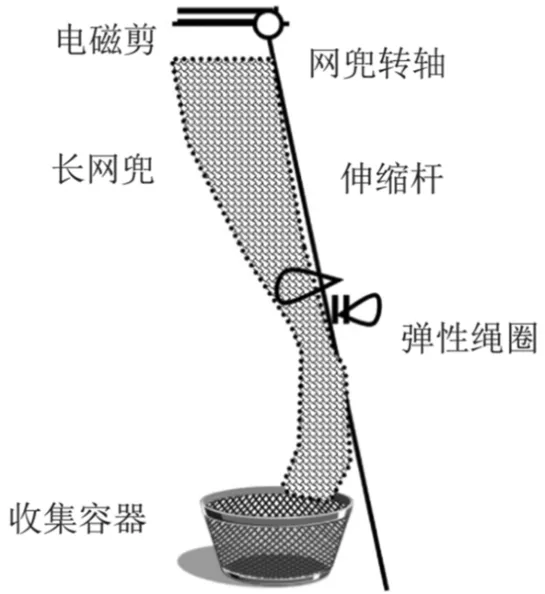
图2 一种新型单果采摘器
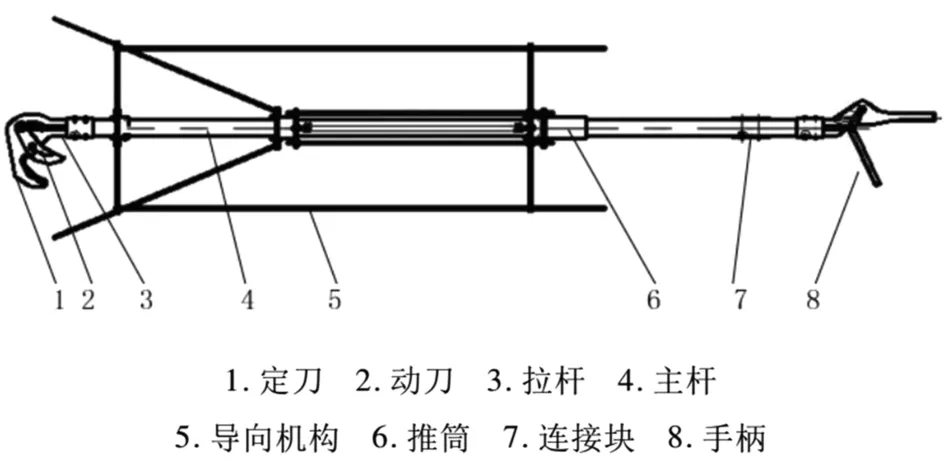
图3 荔枝采摘器
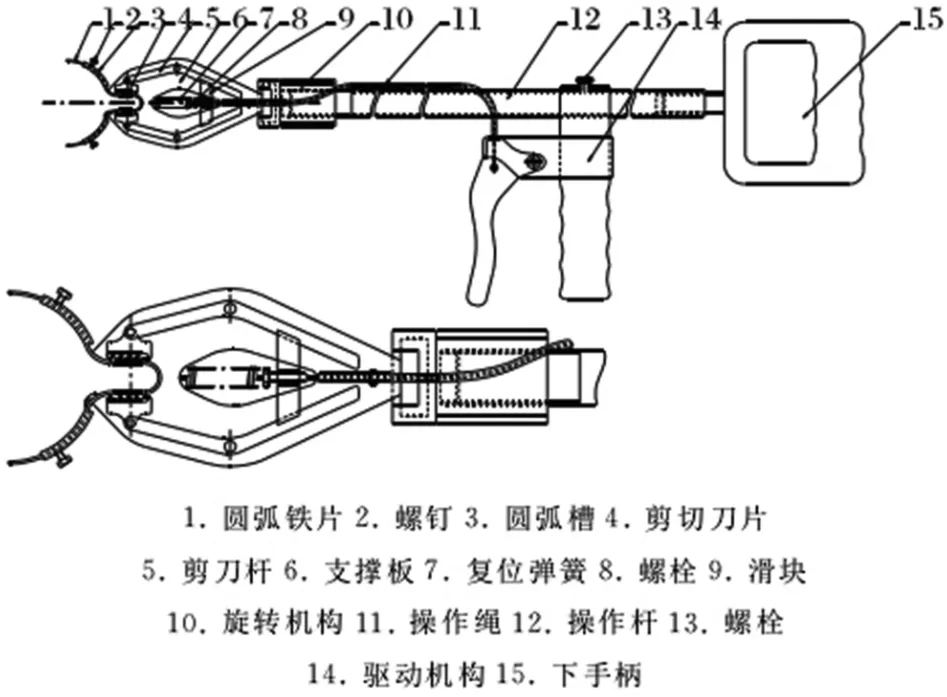
图4 芒果采摘机械手
目前,电动式和机械式的采摘机械仍存在采摘方式单一、操作复杂、易损伤果实等。基于这样的研究现状,通过分析果农的采摘方式和果树的生长特点,设计一种操作简单、便于携带、通用性强且能最大限度保护果实不损伤的机械式采摘器。
2 总体结构与工作原理
2.1 总体结构
便携式水果采摘器整体结构如图5所示,在弹簧的作用下,可动块可绕着其固定轴转动,与采摘器的支架,在钢丝绳的作用下,可动块在自然的状态下处于果篮的另一侧。
2.2 工作原理
开始采摘前,可动块处于原始状态;采摘时,操作者将采摘的果实套入采摘器中,同时按压操作手柄限位孔上的凸起,使得可动块解除锁死,并在执行末端两侧的两个扭簧的作用力下,迅速向采摘器的另一端合拢,因而可动块上的刀片和采摘器上的刀片得以闭合。在下刀片的冲击下,将果柄切断,使果实与果树分离,果实掉入网兜中。拉动操作手柄,使得操作手柄向后运动,当操作手柄的限位孔与杆上的凸起重合时,可动块恢复到原始位置,可动块和操作手柄的位移被限制,即完成果实的一次采摘。采摘过程如图5所示。

图5 采摘器的采摘过程示意图
根据初步的调查,果园的果树高度一般控制在3~5m之间,为满足不同高度果树的采摘,操作杆采用可调节长度的伸缩杆,即操作杆为2段结构,通过调节上下段操作杆的相对位置来实现伸缩。
3 主要部件设计
采摘器的整体结构如图6所示,采摘器主要分为执行末端、操作手柄和操作杆3个部分。采摘器采用纯人力进行操作,3个部分通过简单机械结构进行连接,如图7执行末端中的连接处,其执行末端可动块与操作手柄通过绳子进行连接。
3.1 采摘器执行末端的设计
在设计采摘器的执行末端时,应考虑到质量轻、强度高、不易损伤果实,控制简单以及便于拆卸与更换等几个方面。基于以上几个方面的考虑,执行末端的主体结构选用铝合金材料进行制作,而一些受力较小或不受力的部件则采用工程塑料制作,网兜采用尼龙制作而成,从而最大限度减小其质量。
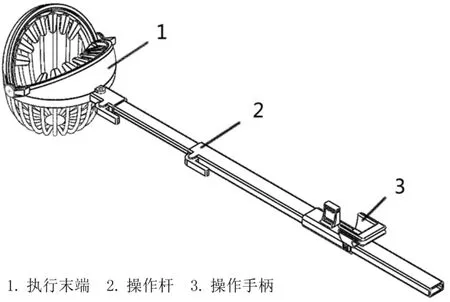
图6 采摘器整体机构示意图
执行末端的具体结构如图7所示,具有两把刀片,一把刀片与执行末端主体结构的顶部连接在一起即上刀片,当果实成熟时,果梗容易与树干脱离、掉落,因此通过控制操作杆使得上刀片与果梗发生相对位移,并给果梗施加一定的作用力使得其与果树分离,掉入果篮中,完成采摘任务;另一把刀片位于可动块的上端,这把刀主要是与主体结构上的刀配合形成一个半圆的剪切装置,利用两端扭簧产生的弹力,使得其迅速向上刀片靠拢、闭合,将果梗剪断,果实与果树分离,完成采摘。
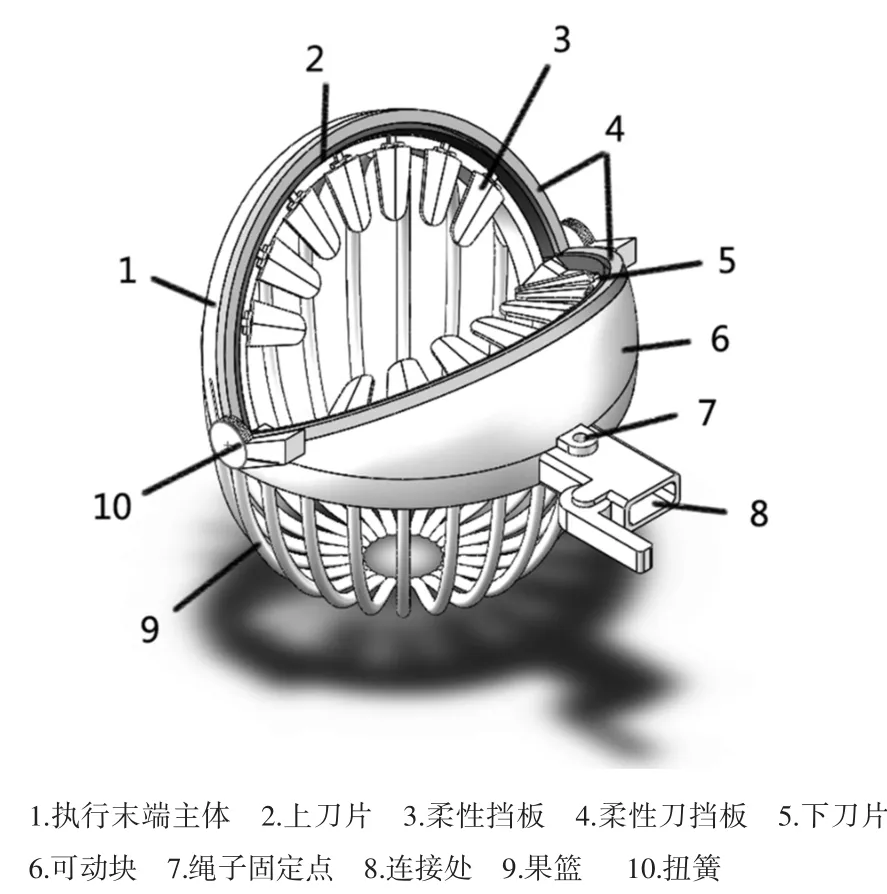
图7 执行末端的机构示意图
执行末端中的柔性挡板和柔性刀挡板均采用2~4mm的硅胶片制作而成。柔性刀挡板分别位于上、下刀片的顶部,其主要起到一个分隔的作用,在采摘过程中将刀具与果实等分隔开,避免刀具锋利的刀口与果实直接接触,造成果实的损伤。柔性挡板均匀的分布于上、下刀片的下端即果篮中,其主要起到一个保护和限位的作用,相邻柔性挡板之间具有一定间隙。采摘过程中,果梗容易落入其间隙中,位移被限制,易于剪切,也避免果梗的移动导致剪切质量。将采摘的果实从果篮倒出时,柔性挡板会在果实的作用下,向外翻并分别将上、下刀片挡住,避免果实与刀片接触,造成果实的损伤。
绳子固定点通过绳子与采摘器后端的操作手柄连接配合,控制可动块剪切和复位的动作。连接处具有一个锁死装置和卡槽,通过其能与不同长度的伸缩杆配合连接为一体,实现不同高度的水果采摘。
3.2 操作手柄
操作手柄用于操作者控制采摘器的工作,须具有一定的强度和便捷性。为控制采摘的整体质量,操作手柄采用高强度的塑性材料制作,长200mm、宽130mm、高120mm,具体结构如图8所示。限位孔是与操作杆上的锁紧装置配合,限制操作手柄的移动,从而限制可动块的位移。

图8 操作手柄的结构示意图
锁紧装置的内部结构如图9所示,由螺旋弹簧和物块组成。操作手柄被往后拉到达锁紧装置时,弹簧首先被压缩且凸起的物块被挤进操作杆中,当限位孔到达物块的位置时,物块在弹簧的作用下凸起与限位孔配合,从而限制操作手柄的位移。按下物块即可解除手柄的限制。
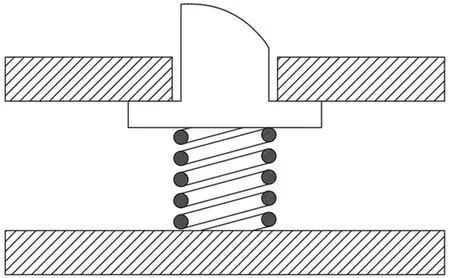
图9 锁紧装置
线槽一用于存储多余的控制线,根据采摘的需求,采摘器需要搭配不同长度的操作杆,同时操作杆也需要伸缩,因此会导致控制线出现多余,影响操作。为解决这一问题而设计了线槽一,操作者可将多余控制线绕在线槽一中。线槽二的作用主要在于将控制线拉直,使其保持直线的状态,避免控制线的松弛导致采摘器的剪切。手柄即为操作者控制采摘器动作的操作点。
4 结论
该采摘器采用机械式的连接和人力控制,通过驱动绳连接控制端与动作端,从而减少采摘器的质量,提高其操作的舒适性和携带的便携性。可根据采摘果树的高度,搭配不同长度的操作杆,且利用硅胶的柔软性对果实加以保护,增强采摘器的通用性和对果实的保护能力。本采摘器可以在今后的试验和调试中,加以改进并与机械手和行走装置等融合,形成新的采摘机器人[7],实现全自动的机器采摘,使其更好为果农服务。
