基于光学测量的高速列车线路安全监控技术
2018-10-08丁小昆胡晓东魏青王维科
丁小昆,胡晓东,魏青,王维科
基于光学测量的高速列车线路安全监控技术
丁小昆,胡晓东,魏青,王维科
(中国航空工业集团公司 西安飞行自动控制研究所,陕西 西安 710065)
针对高速列车运行中,列车本身无有效的安全监控装置,为填补高速列车车载线路安全监控的空白,根据高速列车运行环境、制动距离及安全监控需求,对可能的探测技术进行性能比选,分析表明以制冷型中波红外探测技术为核心的监控系统能够实现远距离的实时高分辨探测。在此基础上完成系统总体参数设计,并完成一套长焦距、小尺寸、100%冷阑匹配的光学子系统设计。最后搭建整机系统,并进行铁路现场实验测试。研究结果表明:该系统能够在雾霾等不良气象条件下昼夜对列车前方4 km外的铁轨以及障碍物等目标进行实时可靠探测,能为高速列车运行提供一种新型主动安全监控技术。
高速列车;安全监控;中波红外成像;光学设计;探测距离
行车安全是铁路运输安全中的基础问题[1−2]。国内外现有列车驾驶模式主要依靠调度命令和人工瞭望相结合的方式来确认安全行车环境[3−4],对通信条件、瞭望条件、驾驶员身心状态和机车状态 提出很高的要求,并且在高速列车上运用时作用受限。根据我国现行《铁路技术管理规程》,动车组列车制动初速度为200 km/h时,紧急制动距离限值为2 km;制动初速度为250 km/h时,紧急制动距离限值为3.2 km;制动初速度为300 km/h时,紧急制动距离限值为3.8 km。传统的调度方式无法实时监测道路状况并传达指令,并且还受制于指令传递信道是否通畅。而对于人工瞭望方式,在能见度极佳的晴好天气,白天人眼瞭望的极限距离最多1 km,而夜间探照距离也只有0.3 km左右,如果遇到雾、霾、风雪等不良气象情况,人工瞭望距离将进一步减小。因此,如果行车前方出现其它列车或突发泥石流、塌方、落石自然灾害等异常警情,列车司机受环境感知能力的限制,可能来不及采取措施而导致行车事故。也就是说,当前高速列车并没有在运行状态下能够实时监测路况的探测技术。而随着我国高速铁路的推广普及,高速列车的运行安全成为了亟待解决的关键问题[5−6]。从20世纪中期开始,铁路发达国家充分利用高新技术发展成果,积极开展灾害监测系统的研究与应用。Uribe等[7]提出一种基于视频监控的铁路防撞系统,利用分辨率640×480的可见光摄像机记录线路情况并用图像处理方法识别障碍物;Mockel等[8]设计了集可见光摄像机和光学雷达于一体的障碍物探测系统,并在低速列车上进行了试验,有效探测距离达500 m;Ruder等[9]开发了一种障碍物自动探测系统,使用12 mm焦距镜头探测50 m远处的障碍物,使用35 mm焦距镜头探测250 m远处的障碍物,采用立体视觉技术对障碍物进行自动报警。但由于高速列车未能普及,国外安全监控系统有效探测距离较短,仅能应用于低速列车。在国内,刘海波等[10]提出一种车载毫米波列车防撞雷达系统,最大探测距离3 km,目前只完成了200 m处的近距离试验,远距离处的分辨率较低,在高速列车上的应用受限;彭少武等[11]提出一种基于无线测距技术的地铁列车防追尾系统,利用无线测距技术对运行中的列车进行双边双程测距,但仅能用于最高运行速度不超过100 km/h的列车,并且仅能对列车之间进行探测,不能探测其他障碍物;关晟[12]提出一种布设在铁路周界的防护网络,集主动红外光束报警、脉冲电子围栏、振动电缆/光缆周界报警于一体,能够对进入防护范围的异物进行报警,但是这种系统需要通过地面主控站进行报警分析后,通过调度方式传至运行车辆,无法满足实时监测并及时响应列车前方运行线路异常警情的需求,并且沿铁路线路大面积铺设红外装置、电子围栏、电缆/光缆成本很高。综上,国内目前绝大部分高速列车均未随车装备安全监控系统,列车本身无有效的线路安全探测装置,处于“盲开”状态,亟需增加可靠的车载安全监控系统。目前我国高速列车最高运行速度约为300 km/h,紧急制动距离限值为3.8 km,因此需在列车行驶前方约4 km远处探测到轨道上的障碍物。本文从当前先进探测技术出发,通过对比分析、设计与实验,为高速列车提供一种可靠的安全监控技术方案。
1 技术方案比选
可用于安全监控的探测方式如表1所示。其中,微波雷达和长波红外方案探测距离可达几十km,但是由于所使用载波的波长较长,使其分辨率差,一般情况下,仅能分辨2 m×2 m的目标[13−14]。可见光成像探测距离仅1 km左右,并且在夜间几乎没有探测能力。短波红外成像方案分辨率较高,可达1 cm×1 cm,但是探测距离仅2~3 km,夜间探测距离将进一步下降,因此也无法满足高速列车安全监控的探测需求。激光雷达和中波红外成像方案在探测距离和分辨率方面均具有一定能力,因此重点对激光雷达和中波红外成像方案进行论证分析。
1.1 激光雷达
激光雷达是一项正在迅速发展的高新技术,具有广泛的用途。由于激光具有单色性好、方向性强、高亮度等特点,因此特别适合于远距离测距及远距离目标跟踪,大量应用于军事探测、大气遥感和大气测量、测绘和大地测量、港口交通管理等领域[15]。
激光雷达一般由下列部分组成:激光光源、发射与接收光路、探测放大电路、捕获跟踪机构及其驱动电路、信号处理单元和数据输出单元等[16],其结构如图1所示[17]。

表1 探测方式性能对比
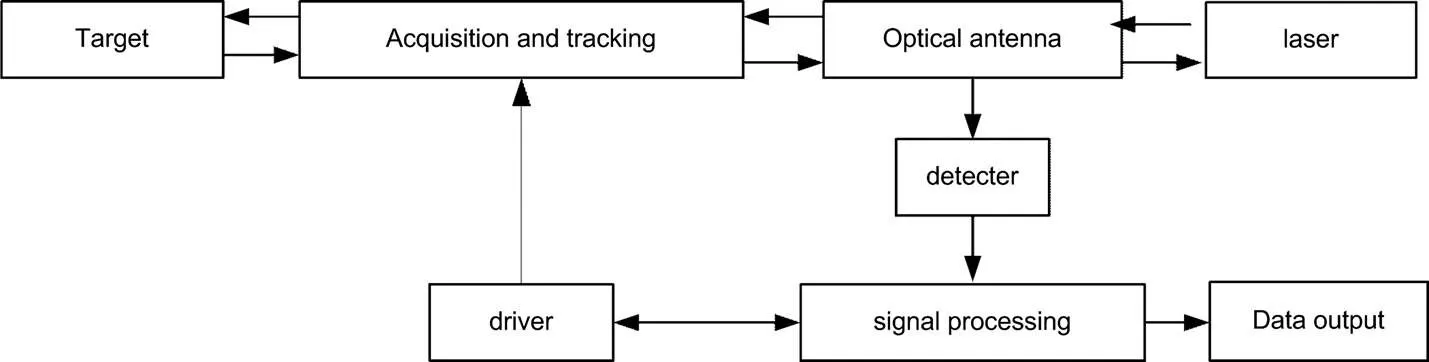
图1 激光雷达结构框图
激光雷达采用扫描发射激光并接收回波信号的方式获取目标的3D图像,其横向分辨率与激光发散角、目标距离相关。由于体积的限制,用于列车安装的激光器发散角最小约0.1 mrad,则4 km处光斑直径最小400 mm。以列车宽度3.5 m为例,则影响列车安全的目标约占9个扫描点。为了便于激光雷达系统的跟踪,同时兼顾轨道周边地貌地形变化监测的需求,将激光雷达横向扫描范围扩展到20 m,共50个扫描点,此时激光雷达的扫描视场为0.29°。当设计激光器重复频率为50 kHz,则一次扫描时间为1 ms,此时以300 km/h速度前进的列车在一次扫描中前进了0.083 m,即理论上,激光雷达能每隔0.083 m给出一次扫描告警信息,即距离分辨率为8.3 cm。
由此可见,激光雷达距离分辨率极高,但远距离处的横向分辨率较低,仅400 mm,不能清晰分辨出铁轨并呈现出高速列车运行前方的路况信息。
1.2 中波红外成像
中波红外成像是依靠目标自身的中波红外热辐射形成红外图像。自然界中,一切高于绝对零度的物体都在不停地辐射红外线,因此利用特定的光学系统和探测器测定目标本身和背景之间辐射的红外线差异就可以得到红外图像[18]。红外成像使人眼不能直接看到的目标的表面温度分布,变成人眼可以看到的代表目标表面温度分布的红外热图像。红外监控仪的特点主要有:
1) 环境适应性好,在夜间和不良气象条件下的工作能力优于可见光和激光雷达;
2) 被动式工作,不易被干扰,能耗小;
3) 靠目标和背景之间各部分的温度和发射率形成的红外辐射差进行探测,因而能对远距离的热辐射目标进行高灵敏度探测。
制冷型中波红外热成像仪由于具有全天候、高灵敏、高精度、高环境适应性等优点,广泛应用于监控、侦查、跟踪与精确打击等领域,是现代军、民用监控设备中不可或缺的成像手段[19]。其工作原理框图如图2所示。
中波红外热像仪所能探测的距离可以用式(1)来近似确定[20]:

式中:为目标探测距离;Δ为目标和背景的温差;为大气在距离上的透过率;为目标在观察方向正交截面内的投影面积;和为成像系统分别在水平、垂直方向上的瞬时视场角;sn为要求的最低信噪比;NETD为探测器的噪声等效温差。
图2 制冷型红外热像仪原理框图
Fig. 2 Schematic diagram of cooled mid-wave infrared imaging
设计中选择探测器像元大小15 μm×15 μm,光学系统焦距0.46 m,则可以求出瞬时视场角为:

目标温差≤0.5 ℃,目标分辨率≤0.15 m×0.15 m,要求最低信噪比为2.8;选择探测器像素数640×512,带镜头整机噪声等效温差25 mK。将这些参数代入式(1),则可以得到探测距离与大气透过率的关系如图3所示。
图3 探测距离与大气透过率的关系
Fig. 3 Relationship between target detection distance and atmospheric transmittance
由图3可见,具有0.15 m×0.15 m分辨率的目标很容易在大于4 km外的距离观测到。此时光学系统角视场为1.20°×0.96°,4 km处的线视场为84 m×67 m。因此,以中波红外探测技术为核心的监控系统既能实现远距离探测,又具有良好的分辨率,能够在大于4 km的距离外探测到小于0.15 m×0.15 m的目标。利用中波红外探测技术,可以获取列车前方4 km外的实时图像,再通过图像识别与跟踪技术提取铁轨及可疑障碍物后,即可实现高速列车运行中的实时安全监控。
2 探测系统设计
2.1 总体方案
探测系统的总体设计方案为:由红外探测单元实时监控约4 km处一定范围内的铁轨,由图像处理单元提取铁轨特征并完成铁轨的跟踪,由此来实现直道与弯道的连续监测;一旦铁轨安全范围内出现异常警情,则由图像处理单元识别目标并报警,根据报警级采取警示、提示减速、紧急制动等措施。
由于对探测距离、探测图像清晰度要求较高,中波红外探测系统采用制冷型总体方案,分为探测器和红外成像镜头两部分。本方案设计中,红外探测器选用美国FLIR公司的制冷型中波红外探测器MiniCore HRC,其技术特点有:
1) 整机噪声等效温差(NETD)<18 mK;
2) 专利的图像细节增强技术(DDE);
3) 具备模拟(PAL)及数字输出模式,其数字输出最高帧频可达115 Hz。
2.2 光学设计
本系统对光学成像镜头的要求见表2。其中,中波红外探测器要求波长范围3.7~4.8 μm;视场和焦距由上文计算得出;根据列车安装位置的要求,系统孔径要求小于130 mm,总长度要求小于150 mm;根据15 μm像元尺寸大小,要求MTF(调制传递函数)在33 lp/mm处应大于摄影系统的下限值0.1;由于本系统非用于测量,因此对畸变要求不高,但也应低于5%。本光学成像镜头的难点主要在于:要求长焦距的同时还限制了很短的系统总长;采用高分辨率红外探测器,从而要求光学成像镜头的分辨率较高;由于制冷型探测器的使用,系统还需考虑冷阑匹配问题。

表2 光学成像镜头需求
首先根据系统长度要求来选择光学系统基本构型。本系统总长度150 mm远小于焦距460 mm,使透射型方案已无法满足,而只能采用折叠光路的反射式结构[21]。在反射式结构中,卡塞格林系统和以卡塞格林为基础的两镜式反射系统广泛用于长焦距、小视场光学镜头中。为了最大程度地缩短光学系统总长度,选用卡塞格林系列中结构紧凑的R-C式结构作为镜头基本构型。由于R-C结构高质量成像的视场仅几角分上下,而本系统要求的视场大于1°,因此加入补偿镜组来校正光学系统轴外像差。此外,为了匹配制冷型探测器的冷阑,采用二次成像方法,使光学系统入瞳成像在冷阑位置并与冷阑大小相等,实现100%的冷阑匹配率。光学系统结构如图4所示。
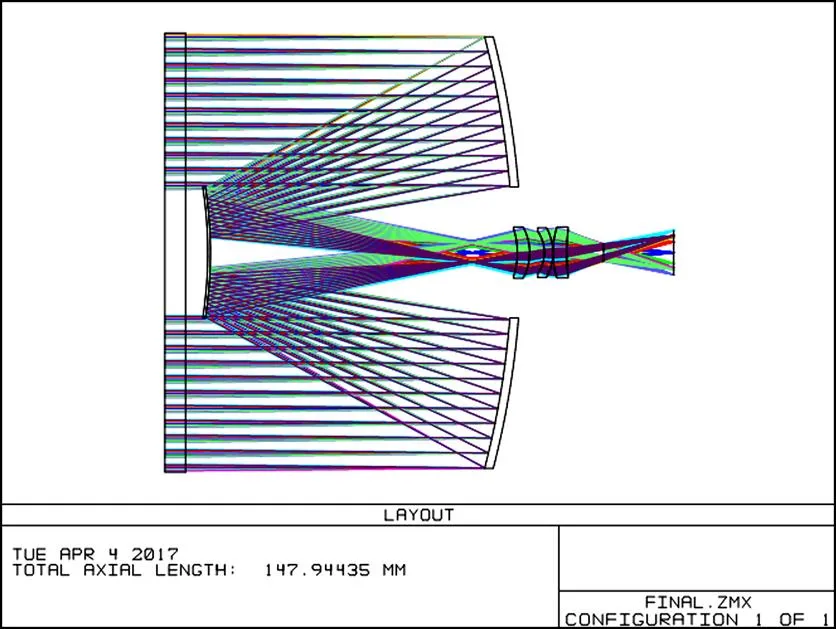
图4 中波红外光学成像镜头
其中,补偿镜组的6个光学面均采用球面设计,大幅降低了光学系统的整体装调难度。系统在加入了前保护玻璃后的总长度也小于150 mm,达到147.9 mm,在保证长焦的前提下大幅减小了总长度,在轴向尺度上实现了紧凑与小型化。系统孔径光阑为主反射镜,直径125 mm,因此系统的最大外径也为125 mm,满足孔径小于130 mm的要求,在径向尺度上也实现了紧凑与小型化。光学系统点列图如图5所示,系统爱里斑半径约22.1 μm,中心视场弥散斑几何半径约11.3 μm,边缘视场弥散斑最大几何半径约27.8 μm,全视场的弥散斑均与爱里斑大小相当,表明系统已达到近衍射极限状态。光学系统MTF曲线如图6所示,衍射极限在33 lp/mm处的值约0.3,1.2°的边缘视场在33 lp/mm处的值约0.1,使光学系统分辨率与探测器分辨率相一致,满足了系统分辨率需求。光学系统的场曲和畸变如图7所示,全视场最大畸变出现在边缘视场位置,约为4%,满足系统5%的畸变要求。

图5 光学系统点列图
将光学成像镜头设计结果与需求对比如表3所示,所有项目均符合设计需求。
从以上分析可知,设计的光学系统结构紧凑,成像质量高,具有和探测器相一致的高分辨率,利用二次成像实现了100%的冷阑匹配,完全能够满足中波红外成像监控系统对光学镜头的需求。
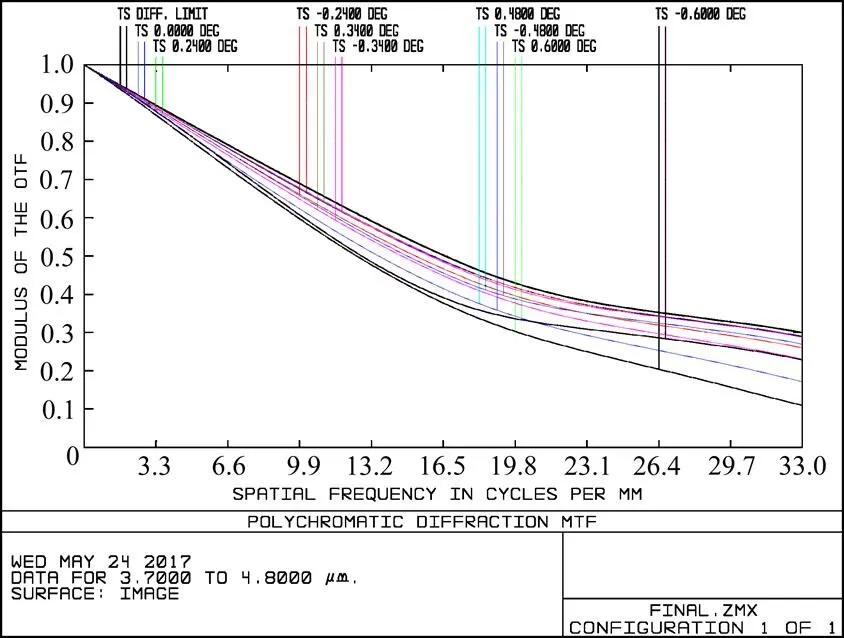
图6 光学系统MTF曲线
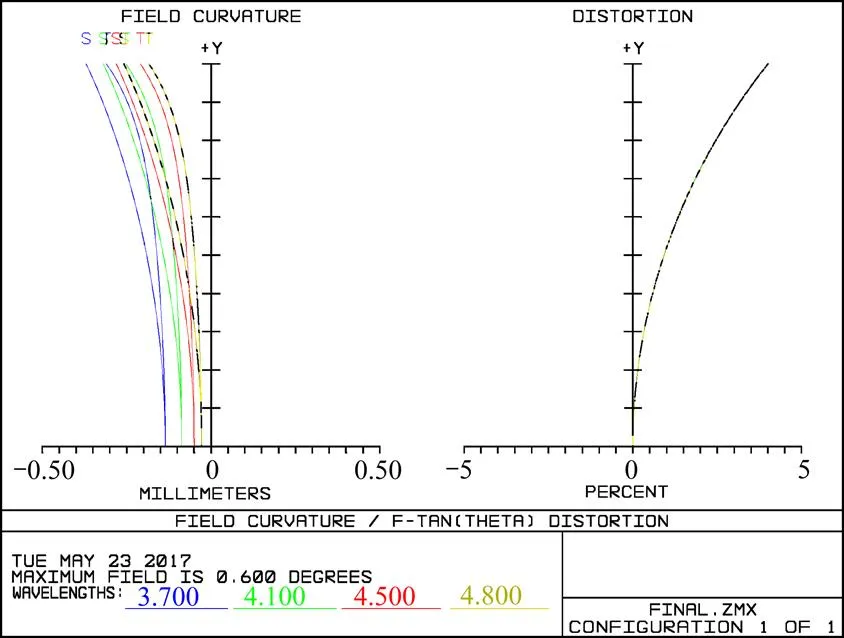
图7 光学系统场曲和畸变曲线

表3 光学成像镜头设计结果与需求对比
3 现场实验
对所论证的探测系统在一段在建高速铁路现场进行了测试实验,实验环境为中度雾霾天气,能见度约2 km,对距离观测点4.8 km处的铁轨、涵洞、人员等目标进行探测,并分别进行白天夜间的对比实验。通过本实验装置探测到的4.8 km处白天、夜间图像如图8和图9所示。图8和图9中,中央有2条铁轨,并在远端进入涵洞。白天探测图像中铁轨上及铁轨两侧的施工人员和工程机械都与背景具有较好的反差;夜间探测图像中铁轨也能清晰分辨,此时施工人员与工程机械都已撤离,因此在铁轨上及铁轨附近呈现出无障碍物的状态。

图8 白天探测图像

图9 夜间探测图像
通过现场昼夜测试实验表明,所设计的探测系统能够在雾霾天里昼夜清晰观测4.8 km外的铁轨、人员、隧道、以及铁路上所摆放的各种障碍物等目标。因而该探测系统能够满足300 km/h速度的高速列车实时安全监控预警需求。
4 结论
1) 根据多种探测方案的技术性能比选与分析,特别是与激光雷达技术相比较,以制冷型中波红外成像技术为核心的探测系统探测距离远、分辨率高、视场大,并且能够穿透雾霾,是实现高速列车运行状态下实时安全监控的最优方案。
2) 设计了探测系统的整机与部件参数,设计了一种长焦、小尺寸、100%冷阑匹配的光学镜头。该光学镜头的分辨率、畸变等关键指标均满足系统探测需求。
3) 对系统进行的铁路现场测试实验结果表明,系统能够在雾霾天气中昼夜清晰观测距离4.8 km外的铁轨、人员、隧道、以及铁路上所摆放的各种障碍物等目标,能够为高速列车提供运行中的安全监控和足够的紧急制动距离。
[1] 鲍枫, 唐祯敏. 铁路安全与人为失误问题的研究[J]. 中国安全科学学报, 2003, 10(10): 45−48. BAO Feng, TANG Zhenmin. Discussion on railway traffic safety and man-made error[J]. China Safety Science Journal, 2003, 10(10): 45−48.
[2] QUAN Yu, HE Dawei, WANG Tao. Detecting the possibility of train derailment based on FBG sensor[C]// Proc. SPIE 8191, International Symposium on Photoelectronic Detection and Imaging 2011: Sensor and Micromachined Optical Device Technologies, Beijing, China, 2011.
[3] 田锐, 刘俊, 贺义勇. 铁路行车安全信息系统设计探讨[J]. 铁道运输与经济, 2015, 37(5): 32−37. TIAN Rui, LIU Jun, HE Yiyong. Discussion on information system design of railway train operation safety[J]. Railway Transport and Economy, 2015, 37(5): 32−37.
[4] 李磊, 陈文郁. 列车安全监控系统的研究[J]. 铁路计算机应用, 2007, 16(7): 39−41. LI Lei, CHEN Wenyu. Study of train safety monitoring system[J]. Railway Computer Application, 2007, 16(7): 39−41.
[5] 缪炳荣, 张卫华, 邓永权, 等. 新一代中国高速铁路动车组面临的技术挑战与策略研究[J]. 中国工程科学, 2015, 17(4): 98−112. MIAO Bingrong, ZHANG Weihua, DENG Yongquan, et al. Technology challenges and strategies of the new generation Chinese highspeed railway EMU[J]. Engineering Sciences, 2015, 17(4): 98−112.
[6] 文超, 彭其渊, 文欢. 高速铁路列车运行冲突管理研究现状综述[J]. 中国安全科学学报, 2010, 20(5): 140−150. WEN Chao, PENG Qiyuan, WEN Huan, Review on conflict management of train operation on high-speed railway[J]. China Safety Science Journal, 2010, 20(5): 140−150.
[7] Uribe Jonny A, Fonseca Luis, Vargas J F. Video based system for railroad collision warning[C]// IEEE International Carnahan Conference on Security Technology (ICCST), Medellin, Colombia, 2012: 280− 285.
[8] Mockel S, Scherer F, Schuster P F. Multi-sensor obstacle detection on railway tracks[C]// IEEE Intelligent Vehicles Symposium, Wiesbaden, Germany, 2003: 42−46.
[9] Ruder M, Mohler N, Ahmed F. An obstacle detection system for automated trains[C]// IEEE Intelligent Vehicles Symposium, Dresden, Germany, 2003: 180−185.
[10] 刘海波, 盛蒙蒙, 杨晓倩. 一种车载毫米波列车防撞雷达系统研究[J]. 雷达学报, 2013, 2(2): 234−238. LIU Haibo, SHENG Mengmeng, YANG Xiaoqian. A study of MMW collision avoidance radar system for trains[J]. Journal of Ladars, 2013, 2(2): 234−238.
[11] 彭少武, 郝志强. 基于无线测距技术的地铁列车防追尾系统设计研究[J]. 铁道通信信号, 2016, 11(2): 64−67. PENG Shaowu, HAO Zhiqiang. Design of metro collision avoidance system based on wireless ranging technology[J]. Railway Signalling & Communication, 2016, 11(2): 64−67.
[12] 关晟. 高速铁路周界防护技术研究[J]. 高速铁路技术, 2015, 6(2): 63−67. GUAN Sheng. Technology research on perimeter protection on high-speed railway[J]. High Speed Railway Technology, 2015, 6(2): 63−67.
[13] Yoram S, Karni W, Renen A, et al. Detection and delineation of buildings from airborne LADAR[C]// Proc. SPIE 5558, Application of Digital Image Processing XXVII, Bellingham, WA, 2004: 149−156.
[14] Puckrin E, Turcotte C S, Lahaie P, et al. Airborne measurements in the infrared using FTIR-based imaging hyperspectral sensors[C]// Proc. SPIE 7482, Eletro- Optical Remote Sensing, Photonic Technologies, and Applications III, Berlin, Germany, 2009.
[15] Molebny V, Kamerman G, Steinvall O. Laser radar: from early history to new trends[C]// Proc. SPIE 7835, Electro-Optical remote Sensing, Photonic Technologies, and Applications IV, Toulouse, France, 2010.
[16] 王建宇, 洪光烈, 卜弘毅, 等. 机载扫描激光雷达的研制[J]. 光学学报, 2009, 29(9): 2584−2589. WANG Jianyu, HONG Guanglie, BU Hongyi, et al. Study on airborne scanning ladar[J]. ACTA Optica Sinica, 2009, 29(9): 2584−2589.
[17] 林均仰, 黄庚华, 舒嵘. 远距离目标跟踪检测激光雷达的现状与发展[J]. 红外, 2008, 29(3): 1−6. LIN Junyang, HUANG Genghua, SHU Rong, Current status of lidar systems used in remote target tracking and monitoring[J]. Infrared, 2008, 29(3): 1−6.
[18] 李国华, 吴立新, 吴淼, 等. 红外热像技术及其应用的研究进展[J]. 红外与激光工程, 2004, 33(3): 227−230. LI Guohua, WU Lixin, WU Miao, et al. Current status and applications of infrared thermography[J]. Infrared and Laser Engineering, 2004, 33(3): 227−230.
[19] 林武文, 徐锦, 徐世录. 红外探测技术的发展[J]. 激光与红外, 2006, 36(9): 840−843. LIN Wuwen, XU Jin, XU Shilu. Development trend of IR detection technology[J]. Laser & Infrared, 2006, 36(9): 840−843.
[20] 安成斌, 张熙宁, 陈盈, 等. 红外成像系统作用距离计算[J]. 激光与红外, 2010, 40(7): 716−719. AN Chengbin, ZHANG Xining, CHEN Ying, et al. Calculation of function range of infrared imaging system[J]. Laser & Infrared, 2010, 40(7): 716−719.
[21] 王灵杰, 张新, 杨皓明, 等. 超紧凑型红外折反式光学系统设计[J]. 应用光学, 2007, 28(3): 288−291. WANG Lingjie, ZHANG Xin, YANG Haoming, et al. Design of a compact infrared catadioptric system[J], Journal of Applied Optics, 2007, 28(3): 288−291.
(编辑 蒋学东)
Safety monitoring technology of high-speed train line based on optical measurement
DING Xiaokun, HU Xiaodong, WEI Qing, WANG Weike
(The Flight Automatic Control Research Institute of AVIC, Xi’an 710065, China)
The high-speed trains are currently not equipped with effective onboard safety monitoring device when operating. In order to fill the gaps in onboard safety monitoring of high-speed train line, this paper compared the performance of several detection technologies based on the operation condition, the braking distance, and the security monitoring requirement of high-speed train operation. The analysis results show that the monitoring system based on cooled mid-wave infrared detection technology can achieve real-time high-resolution remote detection. On this basis, the overall parameter design of this system was completed, and a set of optical sub-system long focal length, small size, and 100% cold shield efficiency were designed. Finally, the whole system was set up and tested in railway field. The experiment results show that the system can reliably detect the railway and obstacles 4 km ahead of the train day and night under adverse weather conditions such as fog and haze, which provides a new active security monitoring technology for high-speed train operation.
high-speed train; security monitoring; mid-infrared imaging; optical design; detection distance
10.19713/j.cnki.43−1423/u.2018.09.006
U298.1
A
1672 − 7029(2018)09 − 2224 − 08
2017−07−10
装备预研中航工业联合基金资助项目(6141B05060701)
胡晓东(1984−),男,河北廊坊人,高级工程师,博士,从事安全监控与光电探测方向的研究;E−mail:huxd01@163.com