应用透明显示器的半自动瞄准系统设计
2018-10-08杨亚东潘金稳吴卫邦
杨亚东,潘金稳,吴卫邦,王 伟
(陆军军事交通学院镇江校区,江苏 镇江 212000)
在趋于多元和隐蔽的现代战争环境下,小口径武器系统在野战防空等方面具有重大的应用价值。就依靠人工瞄准的高炮(高机)装备来说,人工瞄准无法避免地存在反应时间长、瞄准精度差等问题。此外,在日常战备训练中,瞄准手要较好地掌握瞄准技巧需进行大量的专业训练,同时难以准确地对瞄准手技术水平进行检验。因此,小口径武器系统人工瞄准的作战效力存在诸多不确定性。
针对上述现状,基于高炮射击基本原理,应用新科技元件(透明显示器),在环形瞄准具基础上设计一种能够自动装定瞄准线的半自动瞄准系统,这种新型半自动瞄准系统将对人工瞄准武器的作战效能的提高起着积极作用。
1 瞄准命中原理
1.1 瞄准基本原理
瞄准的实质是根据目标方位、距离及运动状态使身管处于一定的空间位置,当弹丸沿平均弹道运动和目标同时到达预定的位置时实现命中。
如图1所示,目标从A点向B点运动时,若要命中,需赋予身管一定的提前角φ,使身管指向目标运动方向前方的某一位置B点(称为提前点),并同
时抬高一定角度α(称为距离角)。在图1中,OA为发射点与目标现在位置点的连线,称为瞄准线,OC表示身管轴线,称作仰线[1],C点称作抬高点。仰线与瞄准线的空间位置是由目标运动状态及武器弹道性能确定的。

1.2 环形瞄准具瞄准原理
常见的高炮(高机)瞄准具有向量式瞄准具、环形瞄准具等。虽然瞄准具的构造不同,但其解命中问题的原理是相同的[2]。图2为某型环形瞄准具,由后部的准星和前部的速度环组成,速度环由多个同心圆环组成,各环代表不同的目标提前速度。

在图3中,点O为后照门准星尖,OA为瞄准线,其与速度环交点记为A′;点B为预计命中位置,OB通过速度环圆心;OC为准星尖与速度环最内环内缘顶点连线,其与身管轴线平行。OC与OB夹角固定,即环形瞄准具射击采用固定的距离角。环形瞄准具解命中问题的方法是:瞄准手根据目标的速度矢量在环形瞄准具的速度环上选择相应半径的圆环,再使目标提前位置处于速度环圆心,从而在速度环上确定瞄准点A′,进而确定瞄准线,射击时瞄准手保持目标处于装定的瞄准线上便可射击。

但是在上述瞄准射击过程中瞄准射击采用固定距离角,且瞄准线由瞄准手基于自身经验目测或上级下达的指令估算装定。实际上,由人工装定的瞄准线精确性和时效性均存在较大误差。
1.3 新型半自动瞄准系统原理
近年来,显示技术发展迅速,尤其是透明显示技术的出现极大地拓展了显示技术的应用空间。据相关文献[3],某高透明OLED显示面板的透明度高达85%,接近普通玻璃92%的透明度。笔者以透明显示器取代环形瞄准具速度环,设计了一种可自动装定瞄准线的新型瞄准具。
图4是透明显示器瞄准具瞄准原理示意图。在透明的显示器上显示出与目标距离和运动状态相应的瞄准点A′,即自动的装定瞄准线,从而为瞄准手直接构成瞄准线。因为显示器是透明的,可透过显示器持续观察目标,瞄准手只需保持构成的瞄准线指向目标便可开火射击。如图4所示,在显示器上红色十字线中心即为自动装定的目标相应瞄准点A′,其在显示器上的位置随目标的距离和运动状态实时变化。准星通过A′点构成瞄准线OA;蓝色圆圈为整块显示器的中心,准星与其连线指向目标的抬高点C,OC和身管轴线平行并垂直于显示器。

使用透明显示器取代速度环后瞄准原理不变,但其可自动装定瞄准线,操作人员只需将瞄准线指向目标,当目标进入攻击范围便可开火射击,属于半自动瞄准。
2 系统设计
2.1 系统结构设计
应用透明显示器的半自动瞄准系统主要由目标运动状态采集、计算及处理、瞄准显示、控制及电源5大模块组成,其结构如图5所示。
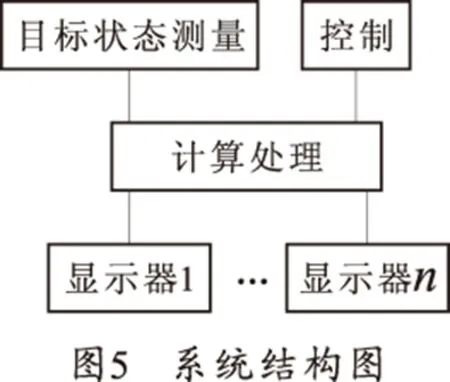
目标运动状态测量模块用于完成对目标方位距离及目标速度、方向等运动参数的实时测量;计算处理模块主要完成射击诸元及对应射击诸元(瞄准点)在显示器上坐标位置的计算;显示器用于显示瞄准点,与后准星构成瞄准线;控制模块用于切换瞄准原理程序算法及显示方式。
2.2 系统原理设计
系统工作原理与自动化瞄准原理相似,如图6所示。在系统末端,自动化瞄准系统装备伺服电机或液压等驱动设备,而半自动瞄准系统则是在环形瞄准具基础上换装一块透明显示器,仍由人工瞄准。

目标运动状态测量模块实时测量目标空间位置参数,并传输给计算处理模块;计算处理模块基于目标状态信息,依据高炮射击理论解算出相应的射击诸元,并求解在显示器上对应瞄准点的位置坐标;显示器依据接收的坐标信息,显示出目标对应的瞄准点;最后,瞄准手只需保持通过准星和瞄准点的瞄准线指向目标便可开火射击。
2.3 关键技术
2.3.1 提前点的计算
提前点的解算通常使用解析法(迭代法)和图解法,其中,解析法精度高,适合计算机编程求解[4-5]。
考虑到弹丸平均速度大于目标速度的特点,依据目标从现在点运动到提前点所用时间与弹丸运动时间相等,提出一种以时间差为判定精度的迭代法求解提前点。
弹丸从发射点到提前点所用时间td等于目标从现在位置运动至提前点的时间tm,其中td可通过相应武器的射表拟合或其弹丸运动微分方程组解算获得;tm可依据目标的运动模型求解获得。常用的目标运动模型有匀速直线假定、匀加速直线假定和圆弧运动假定等。为简化分析,假定目标作匀速直线运动,如图7所示,当前目标处于A点,速度为v,O点为发射点。

1)赋予目标初始运动距离l,l=vptp,式中vp为测得目标平均速度,tp为弹丸达到最大有效射程时的平均飞行时间。将l代入目标运动模型,计算目标运动时间t0,并计算目标第1提前点A1坐标,将A1代入弹道模型求解弹丸飞行时间t1。
2)计算t1-t0,若大于0,则说明目标到达A1时弹丸未到达,即提前点偏近;若小于0,则说明弹丸到达时目标未到达,即提前点偏远;若等于0(接近0),则完成提前点求解。
3)若提前点A1偏近,则在目标航路上取第2提前点A2,并使A1为AA2中点;若提前点A1偏远,则取提前点A2′,并使A2′为AA1中点,如图7所示。
4)新提前点空间坐标结合弹道模型、目标运动模型分别求解到达时间,按步骤2)判断新提前点偏近或偏远。
5)在确定第1个偏远提前点后,新提前点的位置应处于在所有已判定的提前点中距现在点最远的偏近提前点和距现在点最近的偏远点的中点。当td-tm足够小或最后两个提前点距离足够近时认为提前点解算完成。
2.3.2 瞄准点位置的确定
瞄准线与透明显示器的交点便是所要求解的瞄准点,本节关键是确定在瞄准瞬间瞄准点在显示器上所处的位置。
如图8所示,以准星O为原点建立空间直角坐标系,A点为目标现在位置,B点为按前述方法求得的提前点。将B点坐标代入弹道模型,可得出命中B点时应赋予身管的距离角α,进而获得直线OC的表达式
x/xc=y/yc=z/zc
(1)
式中,xc、yc、zc为C点坐标。
前文所述,仰线OC与身管轴线平行,垂直于显示器且交点为后者中心。即直线OC为显示器所在平面的法线,且O点至该平面的距离为准星至显示器中心的距离,即等于瞄准基线长。

此时联立瞄准状态下的显示器所在平面方程和瞄准线OA方程便可求解瞄准点A′的空间坐标。
(2)
式中:p为瞄准基线长;xa、ya、za为A点坐标。
同理,联立平面方程和瞄准线OA方程便可求显示器中心C′点的空间坐标,求得A′和C′坐标,进一步计算可获得瞄准点在显示器上的位置。
2.4 显示界面设计
为便于瞄准具安装校正及在特殊情况下的正常工作,并在针对不同目标时具有合适的瞄准景象,设计了如图9所示的显示界面。其中,图9(a)用于安装校准,过此点的瞄准线与身管轴线平行;图9(b)用于测量设备故障情况下应急射击,其显示景象及位置与原速度环相同;图9(c)、(d)用于针对不同目标如伞兵、直升机等,供射手选择的瞄准景像。

为便于射手在不同环境条件下的操作,将显示器的成像亮度及透明度设计为高、中、低3种模式,分别在不同光照强度下使用。其中,光照越强成像亮度越高,透明度越低,以达到析光的目的。
瞄准十字线的颜色设计为绿、红等多种颜色,以便于观察瞄准;同时可将瞄准十字线设置不同的闪烁频率,用以指示开火及停火时机。
3 结束语
笔者设计的半自动瞄准系统结构简单、功耗低、故障率小,适用于不同口径的高炮(高机),具有更高的可靠性、经济性和兼容性;与人工瞄准相比,半自动瞄准系统瞄准线的计算速度及装定精度远高于人工估算,并且便于掌握使用,具有更高的作战效能。此外,基于透明显示器的新型瞄准系统可内嵌多种目标运动假定、可装定弹道修正模型、可多炮组网射击,具有较大的开发应用潜能,该半自动瞄准系统具有较高的推广应用价值。
