基于L1自适应律的尾坐式飞行器悬停位置控制
2018-09-27钟京洋宋笔锋
钟京洋, 宋笔锋
(西北工业大学航空学院, 陕西 西安 710072)
0 引 言
随着应用的需要和航空技术的发展, 近年来世界范围内掀起了对无人机(unmanned aerial vehicles, UAVs)的研究热潮,究其原因, 用无人机替代有人驾驶飞机可以降低生产成本, 便于运输、维修和保养[1]。很多新构型飞行器被提出并用于救援、森林搜寻等[2]。相比于传统布局的飞行器,兼具悬停和平飞[3],比多旋翼更高平飞的效率[4],以及不需要倾转旋翼类飞行器倾转机构等优点[5],使尾坐式飞行器得到了不断发展。很多科研机构都针对尾坐式飞行器的建模和控制做了不同程度的研究,文献[6]设计了一款四旋翼形式的尾坐式垂直起降飞行器,通过风洞实验对飞行器全包线的气动特性进行了研究,通过仿真和实验验证了飞行器良好的转换飞行能力。文献[7-8]针对所设计的一款可变桨距的尾坐式垂直起降飞行器,分别使用线性二次型调节器(linear quadratic regulator,LQR)以及比例积分微分(proportion integration diferentiation,PID)控制器进行了飞行器姿态控制的研究,结果证明了LQR控制器在存在干扰情况下具有更强的鲁棒性。此外,其他科研机构也都针对尾坐式飞行器进行了不同程度的研究[9-11]。
由于微小型飞行器的质量及转动惯量相对较小,因此更易受到外界环境的干扰。此外,有限的模型精度,纵向和横向之间的耦合等不确定非线性问题,都使其对控制器的设计提出了挑战[12-13]。针对于含有不确定性的系统,模型参考自适应控制(model reference adaptive control, MRAC)的研究已经发展了60年[14-15]。标准的MRAC需要进行快速的在线估计以补偿不确定性,在快速的自适应过程中,高增益反馈会降低系统鲁棒性[16],为了避免鲁棒性的损失,往往需要通过降低自适应速度来实现,但反过来又会降低系统性能。针对这些不足,文献[17-18]在2006年首次提出了L1自适应的控制架构,分别通过针对线性系统以及非线性系统的理论分析[19-21],证明了该架构通过在系统输入处引入低通滤波器,能够在快速的自适应过程中,保证系统一定的鲁棒性,而标准的MRAC在进行快速的自适应过程中,会使系统的鲁棒性出现明显下降,这使得标准的MRAC在实际中无法使用较大的自适应增益,一定程度上限制了控制器的性能。很多研究机构也都基于L1自适应的控制器架构针对飞行器进行了控制方面的相应研究[22-24]。
本文针对一款尾坐式垂直起降飞行器,基于非线性的动力学模型,进行了悬停阶段的位置和高度控制研究。通过将系统分为一个不含不确定的标称系统和一个非线性非匹配的不确定性两部分,采用级联形式的非线性动态逆控制器,对标称系统进行控制,得到期望的指令跟踪性能。考虑到风场扰动以及气动系数的不准确会给系统带来不同变化速度的不确定变量,而L1自适应控制的一个突出特点就是能够快速对不确定进行补偿,以保证系统良好的指令跟随能力,因此,本文采用基于比例自适应律的L1自适应控制器[25]对不确定性和扰动进行补偿,以使系统性能尽可能恢复到理想情况。
1 系统描述及动力学
1.1 系统描述
本文的研究对象为一款飞翼布局的尾坐式垂直起降飞行器,如图1所示,该飞行器的作动器由电机和舵面组成。两个无刷电机转向相反,通过拉力差,进行滚转姿态的控制。舵面由埋在机翼中的舵机驱动,通过反对称偏转产生偏航控制力拒,对称偏转产生俯仰控制力矩。惯性坐标系采用NED(north-east-down)坐标系定义,机体坐标系的定义如图1所示,Xb轴由机腹指向前,Zb轴垂直于螺旋桨平面,Yb=Zb×Xb。气动力的定义服从机体坐标的定义,即升力沿Xb负方向,阻力沿Zb方向,侧力沿Yb方向,攻角的定义沿机翼方向。

图1 飞行器坐标定义Fig.1 Coordinates definition of aircraft
1.2 螺旋桨滑流的计算
由一维动量理论可得由螺旋桨诱导的滑流速度及滑流面积的计算公式[26]。距桨盘x位置处的滑流速度Vpropeller(x)的计算式为
(1)
式中,Rp为桨盘半径;Vavg0为桨盘处(x=0)的诱导速度。其中,Vavg0可由式(2)计算得到。
T=2ρA(Umav+Ugust+Vavg0)Vavg0
(2)
式中,T为螺旋桨拉力;ρ为空气密度;A为桨盘面积;Umav,Ugust分别为机体坐标系z方向的飞行速度以及环境干扰风速。
1.3 系统动力学
描述飞行器位置的运动学方程[27]为
(3)

通过定义
(4)
将式(3)重新写为
(5)
描述飞行器的动力学方程为
ω×Vb
(6)
式中,m为飞行器质量;Fb为机体坐标系下作用在全机的力;ω=[p,q,r]为飞行器的三轴角速率。其中,机体坐标系下,作用在全机的力主要可由如下4部分组成:
Fb=Fb_aero+Fb_disturbance+RG+Fvcontrol(T)
(7)
式中,Fb_aero,Fb_disturbance分别为机体坐标系下滑流诱导的气动力及环境导致的干扰气动力;G为飞行器重力;Fvcontrol(T)为飞行器的虚拟控制量,是电机拉力T的函数,为简洁起见,后文的公式推导使用Fvcontrol代替Fvcontrol(T)。
2 控制器设计
2.1 标称系统确定
考虑到式(5)为运动学方程,仅仅为一个数学关系,本身不含不确定性。从而将系统所有的不确定性都考虑在动力学式(6)中。该飞行器采用电池作为动力,全机质量m并不存在变化,因此不确定性主要来自滑流诱导的气动力以及环境产生的干扰力。
根据式(6)和式(7)可得

(8)


(9)
从而定义不含扰动的标称系统为

(10)
2.2 期望欧拉角求解
由力在不同坐标系下的表示可得
(11)

由式(11)可得内环期望的欧拉角为
(12)

(13)
(14)
根据式(12)~式(14),将重力G的影响放在式(11)中考虑,从而将式(9)和式(10)分别重新定义为
ω×Vb+f(t,Vb(t))
(15)
(16)
2.3 基于标称系统的非线性动态逆控制器设计
根据级联形式的非线性动态逆[28],系统通常分为内环和外环两部分进行设计,且要满足如下条件:内环变量的变化速度快于外环变量。因此将方程(5)作为外环,其输出变量为位置,将方程(16)作为内环,其输出变量为速度,满足上述要求。
分别定义位置和速度状态的一阶期望动力学如下:
(17)
(18)
式中,Am1,Am2为Hurwitz矩阵。
将式(17)代入式(5)中可得虚拟控制量Vv_desire:
Vv_desire=R-1Am1(P-Pdesire)
(19)
根据级联形式非线性动态逆的假设,可得如下近似:
Vv_desire=Vb_desire
(20)
从而有
Vb_desire=R-1Am1(P-Pdesire)
(21)
由式(18)和式(16)可得
ω×Vb
(22)
将式(21)代入式(22),从而得到标称系统控制器:
ω×Vb
(23)
2.4 基于扰动系统的L1自适应控制器设计
在非线性动态逆控制器的基础上,考虑外界干扰及模型不确定性下的自适应控制器设计。根据式(15)、式(18)和式(23),可定义如下受扰动系统:
ωunFadaptive(t)+f(t,Vb(t))
(24)
式中,ωun为系统虚拟输入的不确定增益。根据f(t,Vb(t))的定义可知,风场扰动,飞行器模型不确定性等因素都作为了非线性非匹配的不确定性来进行考虑,需要控制器产生相应作动来抵消其带来的影响。 通过定义bm=1/m,有
2.4.1 问题描述
ωunFadaptive(t)+f(t,Vb(t))
(25)
该系统需满足如下假设:
假设1(Lipschitz连续条件)存在常数L>0,B>0,有
‖f(t,Vb1(t))-f(t,Vb2(t))‖∞≤
L‖Vb1(t)-Vb2(t)‖∞
(26)
‖f(t,Vb(t))‖∞≤L‖Vb(t)‖∞+B
(27)
对于t>0一致有界,L、B的数值可任意大。
假设2令ωun∈Ω[ωun_l,ωun_u],其中0<ωun_l<ωun_u为ωun的已知上下界。
控制器的目标是设计一个状态反馈控制器,使Vb能够跟踪一个有界的分段连续参考信号Vb_desire同时跟踪误差有界。
L1自适应控制器由状态观测器、自适应律和控制器构成。
(1) 状态观测器
(28)

(2) 自适应律


(29)

(3) 控制律
(30)
(31)

,∀ωun∈Ω
(32)
式中,C(s)具有单位增益C(0)=1。
由式(28)~式(30)定义的L1自适应控制器需满足如下条件:
‖G(s)‖L1L<1
(33)
其中
Hxum(s)(sI3×3-Am2)-1
Hxm(s)(sI3×3-Am2)-1bm
(34)
至此,完成了L1自适应控制器的设计。控制系统的完整架构如图2所示。

图2 位置控制系统架构图Fig.2 Architecture of the position control system
2.4.2 误差动力学
由式(25)的系统动力学以及式(28)的状态观测器可得误差动力学方程为
ω0-ω)Fadaptive(t)+

(35)
式中,η(t)=f(t,Vb(t))。
引理2考虑系统式(25)和由式(28)~式(30)定义的L1自适应控制器,如果‖Vbτ‖L∞≤ρ,并且‖Fadaptiveτ‖L∞≤ρu,则有

(36)


(37)
(38)

(39)
γ2‖ν‖L1γ0
(40)

(41)
ρur‖‖L1ρr+‖‖L1+

(42)

Vbin(s)=(sI3×3-Am2)-1Vb0
(43)
2.4.3 闭环系统性能边界
考虑系统(25)以及通过式(28)~式(30)的L1自适应控制器,如果有‖Vb0‖∞≤ρ0,则有

(44)
3 控制器稳定性及性能边界计算
飞行器的基本参数如表1和表2所示。

表1 飞行器基本参数

表2 主要气动力参数
由飞行器的气动参数及风场影响,进行系统不确定边界的确定。风场的影响一般通过飞行器攻角或侧滑角的改变导致全机气动力或力矩的变化进行考虑,以升力为例

(45)
式中,Δα是由风场导致的飞行器攻角变化;ΔCL是相应升力系数的变化。利用Matlab/Simulink突风及紊流模型[29],建立如图3所示的模拟风场环境。

图3 风场干扰Fig.3 Wind disturbances
3.1 不确定边界分析
利用螺旋桨滑流式(1)、式(2)计算可得,在不考虑任何干扰的悬停状态下,飞行器机翼1/4弦线处的滑流速度为13 m/s。假设整个悬停位置控制的过程中,单个电机拉力不超过6 N,机体坐标系下飞行器z方向的速度变化不超过4 m/s,则考虑风场的影响下,滑流区内的速度不会超过20 m/s。同时由气动参数可知,在攻角和侧滑角变化不超过15°,舵偏不超过25°的情况下,CL,CD,CY的值不会超过1.5。滑流速度及气动系数的边界为所有假设取极限时的结果。
由气动力的计算公式,以升力为例有
FLift=0.5CFLiftρV2S≤
0.5×1.5×1.225×20V×0.213=3.913 9V
从而有FLift/m≤4.831 9V。根据假设1,取L=5,B=3。
3.2 控制器稳定性验证
根据式(17)、式(18)可知,Am1定义了期望的位置收敛速率,Am2定义了期望的速度收敛速率,位置环的期望收敛速率理应比速度环的慢,因此从矩阵各元素的绝对值上看,Am1的选取应小于Am2。同时,分别将Am1和Am2中反应x,y方向收敛速率的参数取为一样,以使飞行器在这两个方向具有相同的响应速度,而设定更大Z方向的数值以使飞行器具有更好的定高能力。D(s)反应了L1自适应控制架构中的低通滤波器,这里采用一阶形式,k为低通滤波器带宽,选取时,需要进行系统鲁棒性以及响应性能的权衡。自适应增益Γ主要影响系统状态(这里为速度Vb(t))与L1控制器中状态观测器之间的接近程度,从式(36)可知,由于该项在分母,选取较大的值将使观测器能够更好的近似真实状态。
综上所述,选取控制器参数为
,D(s)=1/s
可得‖G(s)‖L1=0.189 2,从而有‖G(s)‖L1L=0.946<1,满足式(32)定义的L1范数条件。
3.3 控制器性能边界计算

4 仿真结果及分析
根据之前研究可知电机和舵面作动的等效模型[30]。其中,电机模型可用50/(s+50)的一阶传递函数和5 ms延迟环节表示,操纵面的模型可用30/(s+30)的一阶传递函数和10 ms延迟环节表示。由式(7)可知,本文将螺旋桨滑流诱导的气动力和环境变化(风场等)导致的气动力变化都作为干扰项进行考虑。因此,仿真分为两部分进行控制器的验证。仿真初值设置如下:三轴欧拉角为0°,三轴角速率为0°/s,初始舵偏为0°,机体坐标系下,三轴线速度为0 m/s,惯性坐标系下Xe,Ye为0 m,Ze为-20 m,单个电机拉力为4 N。
4.1 未考虑风场的影响
在本仿真中,不考虑风场对全机的影响,主要进行两种控制架构的对比。一种为单独使用非线性动态逆(nonlinear dynamic inversion,NDI)控制器,另一种为联合使用NDI+L1控制器。由式(7)可知,由于未考虑风场影响,因此全机的气动力主要由机翼上的螺旋桨滑流诱导出。
图4给出了3个方向的位置跟踪结果,可以看出,在单独使用NDI控制器时系统出现了不可接受的静态误差,NDI+L1的控制架构则能保证良好的跟踪性能。原因在于,NDI控制器依赖于模型精度,根据式(16)可知,NDI控制器的设计并未考虑螺旋桨滑流诱导的气动力影响,出现了未建模的动力学,而NDI控制器自身无法很好地抵消这种未建模动力学,导致控制器的性能出现下降。NDI + L1的架构可以通过L1自适应控制器对未建模的不确定性进行及时补偿,保证系统良好的响应。在实际中,不确定性模型是很难预先精确获取,因此需要L1自适应控制器进行补偿。
图4(a)在仿真初始阶段出现了一个正向超调,原因在于,当飞行器机翼的迎角在0°附近时,全机存在一个负值俯仰力矩,这使的飞行器在仿真初始阶段,会有短暂的低头,从而产生一个X方向的正向运动,但控制器很快产生相应的作动,使飞行器保持在期望的位置。从图4(c)可以看出,在飞行器进行X或Y方向移动的初始时刻,Z方向会存在短暂的高度变化,波动幅度小于0.3 m,该波动的大小主要受到期望欧拉角约束(仿真设置为±30°)及控制器参数Am1,Am2的影响。

图4 位置跟踪响应对比Fig.4 Comparisons of position tracking performance
4.2 考虑风场干扰及建模误差影响
本仿真中,引入风场干扰及建模误差的影响。由风场导致全机主要的气动力变化如图5所示。

图5 风场干扰下的全机气动力变化Fig.5 Aerodynamic variation under wind disturbances
由于升力系数CLα值较大,对这一项进行拉偏会对模型产生相对大的影响,从而能够对控制器进行有效检验,因此在仿真初始时刻将其进行20%的拉偏。
对于时变干扰,控制器必须及时产生相应作动以保证系统良好的响应。3个方向的位置跟踪情况如图6所示。可以看出,由于持续的风场干扰,导致指令跟踪存在一定的波动,但控制器依旧能使波动保持在一个较小的范围内,保证良好的系统响应。

图6 风场干扰下的位置跟踪响应Fig.6 Position tracking performance under wind disturbances
图7和图8分别给出了机体坐标系下,飞行器的三轴线速度及该速度与L1状态估计器估计的线速度之间的误差。图7的速度幅值验证了不确定边界假设的合理性,即机体坐标系下飞行器Z方向的速度变化不超过4 m/s。此外,图8中速度误差的幅值小于0.001 m/s,验证了性能边界的计算结果γ0。

图7 机体坐标系下三轴线速度Fig.7 Three-axis velocity in the body frame

图8 机体坐标系速度估计误差Fig.8 Velocity estimation error in the body frame
图9给出了在风场干扰的仿真环境下,飞行器悬停阶段攻角和侧滑角随时间的变化情况,其中攻角和侧滑角的定义方式与常规固定翼保持一致,即沿机翼方向。从图9中可见,风场使得飞行器的攻角及侧滑角分别在-12°~1°以及-7°~5°的范围内变化。考虑到前述在进行控制器参数设计时,对一些变量不确定边界进行的预估,图9的仿真结果验证了对于攻角和侧滑角变化不超过15°的假设,也证明了前述不确定边界假设的合理性。
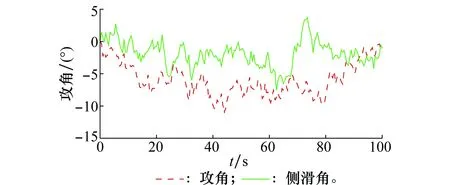
图9 攻角和侧滑角Fig.9 Angle of attack and sideslip
图10给出了风场干扰下,三轴欧拉角的跟随情况。其中,内环控制器采用了类似架构的L1自适应器进行设计,内环控制器所需的三轴期望欧拉角,由本文设计的位置控制器给出。从仿真结果可以看出,在风场干扰下,内环控制器具有很好的指令跟随能力,这也为外环控制器的指令跟随提供了良好支持。


图10 风场干扰下的三轴欧拉角响应Fig.10 Euler angle response under wind disturbances
4.3 风场干扰下飞行器的悬停定点能力
为了明确飞行器的悬停精度,进行了风场干扰下飞行器的定点悬停仿真实验。其中,风场的定义与前文部分保持一致,仿真结果如图11所示。

图11 飞行器悬停特性测试Fig.11 Hovering characteristic tests of the vehicle
从图11(a)~图11(c)可以看出,在无风的情况下,飞行器可以实现精确的定点悬停,而在有风情况下则会出现一定的波动。图11(d)将存在风场扰动情况下,X方向和Y方向的位移整合到一起进行悬停能力的说明,从图中可看出,即使存在一定的风场干扰,飞行器绝大多数时间都不会超过半径为0.5 m的圆,Z方向的高度变化小于±0.2 m,因此可认为该飞行器具有良好的定点悬停能力。其中,图11(a)显示X方向位置初始存在较大的波动,主要原因在于仿真初始阶段,0°附近攻角时,机翼存在一定的升力,而此时作动器还没有足够的时间产生相应的控制效果所致。
5 结 论
本文以一款飞翼布局的尾坐式垂直起降飞行器位置控制问题为研究背景,考虑到微小型飞行器存在难以精确建模,易受环境干扰等特点,通过将影响因素转换为一个存在非线性非匹配的不确定性系统,研究了悬停阶段的位置控制。提出使用级联形式的NDI控制器结合L1自适应控制器的架构进行控制器设计,以改善系统的鲁棒性和指令跟踪能力。相比于标准的NDI,级联形式的NDI存在显式的期望动力学表达,更易于与L1自适应控制器联合设计,并且控制器形式更简单。
同单独使用NDI控制器相比,本文通过使用L1自适应控制器对不确定性进行补偿,有效地避免了NDI过于依赖模型精度的问题,同时对于不确定性及扰动有良好的补偿能力。仿真对单独使用NDI和结合使用L1进行了对比,证明了L1自适应控制器快速的补偿能力,同时在一定的风场干扰下,本文提出的控制架构仍能保证系统良好的指令跟踪性能,尽管只对风场干扰及不确定气动参数进行了讨论,但由提出的控制器架构可知,其他扰动同样可以作为非匹配的不确定性加入系统进行考虑。
此外,控制器的参数整定过程相对简单,所需状态可由飞行控制器直接提供,同时比例型自适应律的L1自适应控制器运算负荷低,易于进行工程实现。下一步将考虑连续系统控制器设计的离散化,以便之后进行的实际试飞测试工作。
