双通道船用星敏感器设计与构建∗
2018-09-27郑振宇
唐 君 郑振宇 李 伟
(海军大连舰艇学院航海系 大连 116018)
1 引言
船用星敏感器工作于大气层内,星空受云层分布情况影响较大,星敏感器需要具有大天区覆盖能力,以保证视场内有足够数量的星体。同时,船用星敏感器工作于海平面环境下,受到大气折光、背景杂光、尘埃颗粒以及船体自身的摇荡震动影响,所获取的星空图像质量远不如航天飞行器上的星敏感器,大视场光学系统结构会使单个像素对应的空间角分辨率大大降低,不利于获得高精度的星象质心坐标,因此需要减小视场提高精度。高精度要求采用的小视场光学系统结构与前面所提的大天区覆盖需求产生了尖锐矛盾,是船用星敏感器技术研究中亟待解决的问题。针对以上问题,提出一种双通道结构的捷联式船用星敏感器系统设计思路,通过小视场拼接技术既保证了大天区覆盖能力,又兼顾了小视场的高分辨率要求。
2 双通道观测方案
双通道船用星敏感器的观测单元由两个各自独立的光学系统构成,其结构参数由两观测通道的空间变换矩阵[1]严格确定。为保证船用星敏感器海上工作环境下全时无遮挡观测,设计上通道光轴(z轴)指向天顶附近。由于低高度天体观测大气折光影响的不确定性,并且兼顾两通道大夹角分布的观测需求,采用上、侧两通道成70°的夹角的设计方案。
如图1所示,o-xyz为上通道像空间坐标系,o-XYZ为侧通道像空间坐标系。假设在侧通道的视场内有一星体S,在侧通道像平面上的投影为s,该星体在侧通道像空间坐标系中可表示为(Xc,Yc,-f)。双通道一经安装固定后,通过光学系统高精度标定方法[2],两个通道像空间坐标系的转换矩阵Rcs可以严格确定,星体S在上通道像空间坐标系中的矢量可表示为

因此,通过空间坐标矩阵变换的方法,可以将两个相互独立的小视场捕获的全部星体信标,转换融合在一个虚拟的大视场光学系统中成像[3],并将它们的像空间坐标作为观测数据一同进行后续的导航计算。该方法不仅保证了小视场观测的高分辨率,而且多视场组合拓展了天区覆盖范围,摄取的星体数量得到了保证,对提高导航解算精度产生了显著的效果。
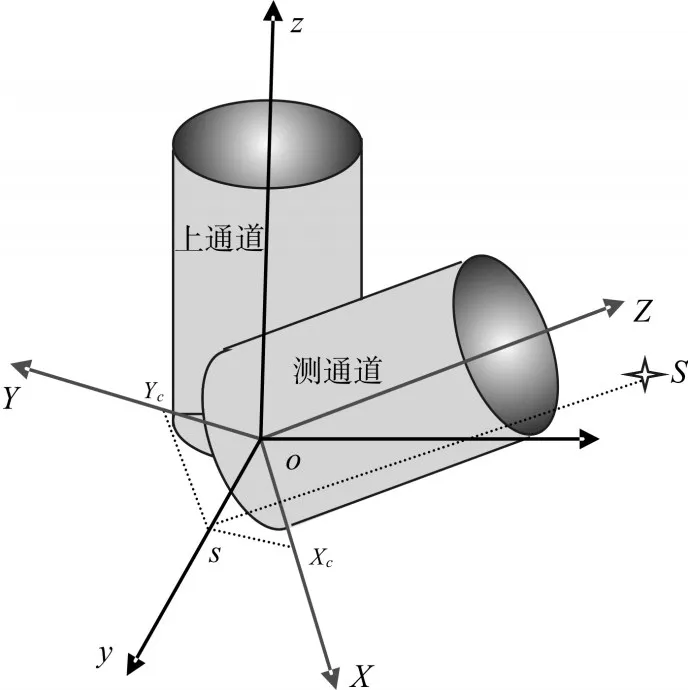
图1 双通道观测方案图
3 双通道星敏感器的工作流程
船用双通道星敏感器的工作流程如图2所示:
1)初始化
双通道星敏感器的初始化过程主要进行的工作是启动GPS和载入星库。通过GPS提供的观测点地理坐标和观测时间,可以计算确定测站天顶赤道坐标。舰艇的摇摆幅度具有一定范围,对于中型以上舰艇,在大多数海况下,震荡幅度不大于10°。因此,以天顶的赤道坐标代替上通道光轴的赤道坐标作为依据载入10°天区范围的星库;基于侧通道与上通道的夹角关系,侧通道光轴的概略赤道坐标也可以确定,作为根据载入侧通道10°天区范围的星库,至此,系统初始化结束。
2)采集星图并处理
该步骤主要完成星敏感器观测数据的获取和处理。首先,星敏感器的两个通道严格在同一时刻各自摄取一帧星图。然后,对两帧星图进行图像处理,分别得到星像点在各自像平面上的质心坐标。

图2 双通道船用星敏感器工作流程图
3)像空间坐标转换
该步骤主要完成两项工作,一是将两个通道的星像平面坐标转换为各自的像空间坐标;二是将侧通道星像的像空间坐标通过转换矩阵Rcs,转换成上通道像空间坐标系中的坐标,并与上通道星像的像空间坐标一起保存在二维数组中。
4)星体辨识[4]
该步骤承接于步骤2),以上通道为例,根据已获取的星像间的坐标关系,构造星像三角形,并在步骤1)预先载入的星库中进行查找比对,得到导航星的相关信息,实现星像的识别。侧通道与上通道识别过程相同,当星像识别成功后,在星库中获得该星体的赤道坐标。
5)视位置计算[5]
对于成功识别的星体,获取的赤道坐标是该星体的年中平位置(构造星库时已经完成由星表历元平位置到年中平位置的转化),为获得舰船载体观测瞬时的姿态,必须进行年中平位置到观测历元视位置的转换。视位置计算的主要内容是:计算恒星的赤经自行和赤纬自行,修正岁差对恒星赤经赤纬的影响,修正章动对恒星赤经赤纬的影响,修正周年光行差对恒星赤经赤纬的影响。通过视位置计算对星体的赤道坐标进行精确修正后,再经转换矩阵RH,就可以得到星体的站心地平坐标[6]。
6)姿态计算
基于步骤3)和步骤5)中获得的观测时刻的星体像空间坐标和星体站心地平坐标,通过求解姿态矩阵[7]RC,星敏感器就实现了载体的三轴姿态测量。如式(2)所示,H为航向角,P为纵摇角,R为横摇角[8]。

4 船用星敏感器的硬件构建
星敏感器硬件主要由如下几部分组成:光学镜头(两个),CCD及控制器(两套),嵌入式计算机,即PCC-3790工控主板(一块),DH-VT111视频采集卡(两块),电源(一个),3.5寸触摸显示屏(一个)。其中镜头和CCD(包括控制器)构成了星敏感器的光学系统[9],它们的选择合适与否,直接关系到星体成像质量的优劣,进而影响到姿态计算的精度。
1)镜头
星敏感器采用镜头的焦距为160mm,最大相对孔径为1:1.6,视场角为2.9°。其相对孔径、视场角等参数可以满足星敏感器高分辨率指标的要求,为最终姿态计算精度提供保证。
2)CCD(Charge Coupled Device,电荷耦合器件)
CCD是Charge Coupled Device(电荷耦合器件)的缩写,它是一种半导体光电信号转换器件,具有灵敏度高、抗强光、畸变小、体积小、寿命长、抗震动等优点[10]。星敏感器选取CCD的面阵尺寸为6.4×4.8(mm),有效像素为44万,最低照度<0.0001Lux,信噪比为52dB,工作电压为12 V。
3)PCC-3790嵌入式工控主板
为减少星敏感器的体积,使设备更加小型化、一体化,采用PCC-3790嵌入式工业计算机主板对星敏感器的数据进行处理与解算,如图3所示。PCC-3790是一款在90mm×110mm尺寸上开发出来的P4级全功能嵌入式工业计算机主板,该款主板采用低功耗Intel Atom N450微处理器及ICH8M集成芯片组,“凌动”Atom P4处理器主频达1.6G,可完全满足高端工业智能设备的高速运算需求。在扩展型PCI∕104尺寸主板上板载1G DDRII内存,彻底解决了内存插件不良的系统隐患[11]。板载CF卡座,方便搭建无盘工作系统。
由于采用英特尔超低功耗嵌入式芯片,P4级高性能的PCC-3790整板最大功耗仅15W,采用独特的被动散热系统,无需风扇。主板集成度高、体积小、功能齐全、低功耗,最为适合应用于各种嵌入式智能设备中。

图3 PCC-3790工控主板实物图
4)DH-VT111视频采集卡
星敏感器采用两块大恒图像公司生产的DH-VT111视频采集卡作为图像采集设备(DH-VT111支持1路复合视频输入输出,所以选用两块采集卡以满足双通道的观测要求)。DH-VT111是基于PC∕104-PLUS总线的高性能图像采集卡,可进行高质量彩色∕黑白图像的实时采集。DH-VT111可将输入的彩色或黑白视频信号,经数字解码器、模∕数转换器进行比例缩放、裁剪、采集、色空变换等处理,通过PCI总线传送到VGA卡上实时显示或传送到计算机内存中实时存储。视频数据的传送过程是由DH-VT111来控制的,无需CPU参与,传输速度可达40MB∕s,采集卡实物照片如图4所示。
图4 DH-VT111视频采集卡实物图
5 结语
论文提出的双通道船用星敏感器设计与构建方案,为动态条件下高精度舰船姿态测量、舰面设备基准检测、以及舰船天文导航提供了一种新方法[12]。系统主要由两套小视场光学传感器与嵌入式工控主机构成,无需造价昂贵、结构复杂的硬件支撑,具有较高的应用价值与经济效益。但是由于硬件小型化集成度高,在处理速度方面受到了限制,系统软件设计方面也存在进一步优化的空间。
