载人潜水器支持母船声学系统∗
2018-09-27张同伟王向鑫唐嘉陵秦升杰
张同伟 王向鑫 唐嘉陵 秦升杰
(1.国家深海基地管理中心 青岛 266237)
(2.青岛海洋科学与技术国家实验室海洋地质过程与环境功能实验室 青岛 266237)
(3.青岛海洋科学与技术国家实验室海洋观测与探测联合实验室 青岛 266237)
1 引言
载人潜水器支持母船是一类具备特殊功能的现代大洋综合科考船[1~5],不仅可以为载人潜水器深潜作业提供水下∕水面技术支持,而且能够执行大洋科学调查任务。载人潜水器深潜作业支持主要包括:下潜准备阶段的潜水器技术保障和作业海区环境调查等;下潜过程中的潜水器布放回收、通信定位和应急救援等;下潜完成后的潜水器维护和样品处理等。
载人潜水器支持母船声学系统应具备载人潜水器及其他水下移动载体的作业支持、地球物理探测、物理海洋探测、海洋生物探测、船舶航行安全保障和其他辅助功能。除了载人潜水器外,水下移动载体主要包括声学∕光学拖体、自主式水下机器人(AUV)、有缆遥控潜水器(ROV)、混合有缆遥控潜水器(HROV)和复合型水下机器人(ARV)等。对它们的水下作业支持主要包括水声通信系统、超短基线定位系统和长基线定位系统等[6]。地球物理探测是指对海底地形、地貌、浅地层等进行探测,相应的声学系统主要包括深水多波束测深系统、中浅水多波束测深系统、深水单波束测深系统和深水浅地层剖面探测系统等。物理海洋探测是指对海洋流场、内波、涡旋、气泡团和羽状流等进行探测,相应的声学系统主要包括船载走航式声学多普勒流速剖面仪(ADCP)和分裂波束声学探测系统等。海洋生物探测是指对浮游生物、鱼虾、沉水植被等进行探测,相应的声学系统是分裂波束声学探测系统。船舶航行安全保障是指船舶的航行和靠港,相应的声学系统主要包括单波束测深系统和多普勒计程仪。
2 载人潜水器支持母船声学系统分类
载人潜水器支持母船的声学系统主要包括深水多波束测深系统[7~8]、中浅水多波束测深系统、深水单波束测深系统[9]、深水浅地层剖面探测系统[10~11]、深海超短基线定位系统[12]、深海长基线定位系统[12]、分裂波束声学探测系统[13]、船载走航式声学多普勒流速剖面仪[14]和水声通信系统[15]等。
2.1 深水多波束测深系统
2.1.1 基本功能
深水多波束测深系统是载人潜水器支持母船不可或缺的基本配置。在载人潜水器作业环境保障领域,通过对作业海区进行宽覆盖、高精度、高分辨率的地形扫测,为载人潜水器下潜作业的开展提供基础海底地形资料,辅助载人深潜调查研究,保障深潜作业安全性;在大洋资源勘探领域,通过大面积走航式海底地形地貌观测,提供实时水深数据、水体特征和海底地形变化情况,结合取样和其它资料,可实现海底矿产资源和天然气水合物的有效探测;在科学研究领域,形成满足调查研究的海底地形图,对于研究海底的地壳运动、火山爆发、海底地震、矿藏分布形成和地球构造演化分析等地球地理现象非常重要。
2.1.2 系统组成
现代深水多波束测深系统主要包括:多波束声学系统(声纳信号处理系统、发射∕接收换能器、显控系统)、软件系统(数据后处理软件、导航采集软件)、外围辅助传感器(罗经、姿态传感器、声速计、验潮仪、GPS∕水下导航系统等)。
2.1.3 典型系统
国际上主要的深水多波束测深系统生产厂商主要有:L3 ELAC Nautik、Teledyne(原 ATLAS)和Kongsberg等几家公司。表1给出了3款典型深水多波束测深系统的对比。深水多波束测深系统需要从测深精度、波束数、覆盖宽度、稳定技术、信号处理方法和换能器阵尺寸等方面进行综合评估。总体而言,三款深水多波束测深系统各具特色:Teledyne HydroSweep DS具有尺寸小巧、波束数多、精度高、多功能等特点;Kongsberg EM122技术性能良好,能在高海况高船速条件下正常作业,可加配Kongsberg SBP120浅地层剖面仪并共用换能器,节省空间和安装维护成本;L3 ELAC SeaBeam 3012性能稳定,标称精度略低于前两者。
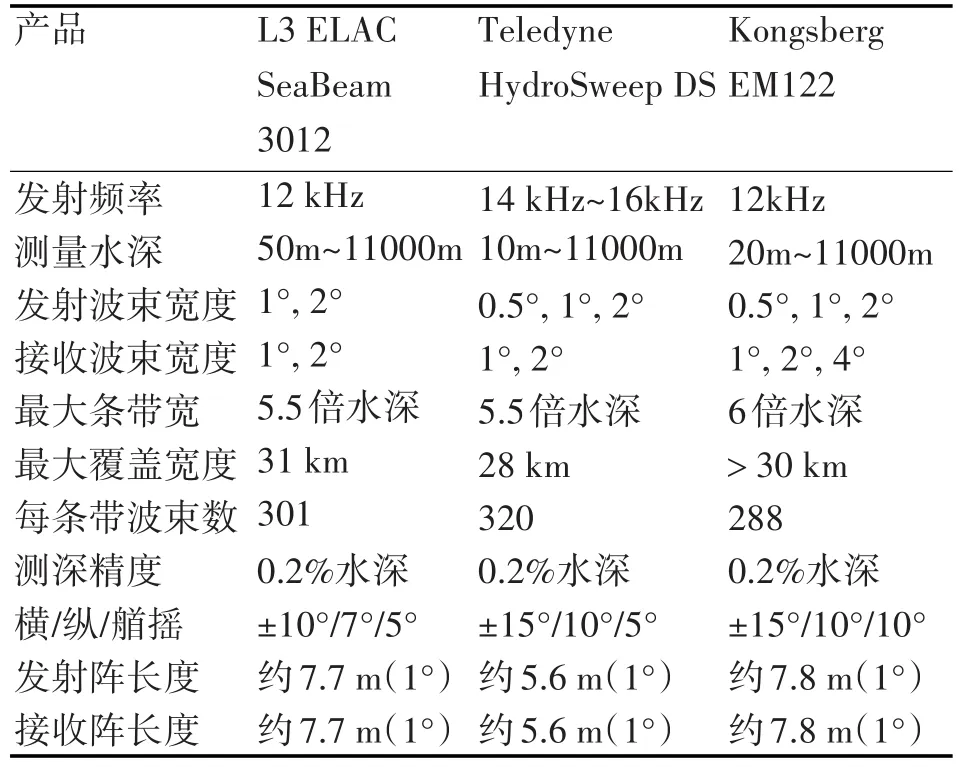
表1 典型深水多波束测深系统对比
2.2 中浅水多波束测深系统
2.2.1 基本功能
中浅水多波束测深系统是全海深多波束测深系统的必要补充,也是载人潜水器支持母船不可或缺的基本配置,提供中浅水区域更高精度的海底地形数据,其探测数据在潜水器作业环境保障、资源勘探、科学研究等领域具有广泛的应用。
2.2.2 系统组成
中浅水多波束测深系统与深水多波束测深系统的系统组成类似,主要包括:多波束声学系统、软件系统、外围辅助传感器。
2.2.3 典型系统
国际上主要的中浅水多波束测深系统主要有:L3 ELAC SeaBeam 3050、Teledyne(原 ATLAS)Hy⁃droSweep MD50和Kongsberg EM710。总体而言,三款中浅水多波束测深系统各具特色:L3 ELAC Sea⁃Beam 3050测深范围大,产品性能稳定;Teledyne HydroSweep MD50多波束具有波束窄、波束数多、水体测量功能强大、换能器尺寸小等特点;Kongs⁃berg EM710产品成熟,能在高海况高船速条件下正常使用,换能器尺寸小。
2.3 深水单波束测深系统
2.3.1 基本功能
深水单波束测深系统是载人潜水器支持母船不可或缺的基本配置,主要用于探测正下方海底深度,提供船只所在位置的现场水深数据,是多波束测深系统的必要补充。在载人潜水器作业环境保障领域,实时提供母船所在位置的现场水深数据,实现载人深潜辅助调查研究,保障深潜作业安全性;在大洋科考领域,通过在走航过程中获取高质量水深数据,为其它学科和项目的调查观测提供水深数据,并保障船舶走航和作业的安全。
2.3.2 系统组成
深水单波束测深系统主要包括:换能器阵、发射功放、接收单元、操控台和外围辅助传感器。
2.3.3 典型系统
国际上主要的深水单波束测深系统主要有:Teledyne(原 ATLAS)DESO 35、Kongsberg EA600和Knudsen CHIRP 3260。单波束测深系统需要从测深精度、测深范围、波束开角和辅助功能等方面进行综合评估。总体而言,三款深水单波束测深系统各具特色:Teledyne DESO 35是一种有双重或三重声道可同时运行的便携式回声探测仪,可配置高频声道转换器和低频声道转换器,具有更宽的频率范围,不局限于指定换能器而可轻松适用于现有换能器或新型换能器;Kongsberg EA600配备3个频段,多个换能器,其3个频段可以达到万米测深的能力,且浅水和深水测深都可以兼顾;Knudsen CHIRP 3260配备4个频段,多个换能器,且浅水和深水测深都可以兼顾。
2.4 深水浅地层剖面探测系统
2.4.1 基本功能
深水浅地层剖面探测系统是载人潜水器支持母船不可或缺的基本配置,主要用于深海海底浅地层结构测量,获取详细的地层分布资料,并有效地识别海底表层沉积物的类型。在载人潜水器作业环境保障领域,通过对作业海区进行全海深的深度和精细地层剖面测量,实现载人深潜勘查作业区地质构造的初步勘查,为载人潜水器下潜作业提供基础海底地质环境资料,并辅助载人深潜调查研究,保障深潜作业安全性;在大洋资源勘探领域,通过大面积走航式海底浅地层剖面测量,结合地质解释,探测到海底地质构造情况,反映富钴结壳、多金属结核等海底矿产资源的分布状况;在科学领域可用于声学底质分类、声学海底原位测试、火山岩浆活动和构造地貌等。
2.4.2 系统组成
浅地层剖面探测系统主要包括:换能器阵、发射功放、接收单元、操控台和外围辅助传感器。
2.4.3 典型系统
国际上主要的深水浅地层剖面探测系统生产厂商主要有:Teledyne(原ATLAS)、SyQwest、Kongs⁃berg和Innomar等几家公司。表2给出了几款典型深水浅地层剖面探测系统的对比。浅地层剖面仪需要从穿透深度、换能器阵尺寸、发射原理、波束宽度、稳定技术和信号处理方法等方面进行综合评估。总体而言,几三款深水单波束测深系统各具特色:Kongsberg SBP120采用常规阵直接发射声波,而且与Kongsberg EM122深水多波束共用接收阵,节省了空间和安装成本;Kongsberg TOPAS PS18和Teledyne ParaSound P70利用参量阵效果通过发射两个高频初级信号来产生一个低频二级信号,其换能器收发共用,且尺寸小,可通过电子扫描来实现多波束功能。
2.5 深海超短基线定位系统
2.5.1 基本功能
超短基线定位系统是大型现代载人潜水器支持母船不可或缺的基本配置。在载人潜水器作业环境保障领域,用于潜水器水下自身定位以及与支持母船之间的定位,实现支持母船对潜水器航行轨迹的持续跟踪,保障深潜作业安全性;在大洋科考领域,可用于AUV、ROV等水下探测设备的水下定位、跟踪与导航,还可与海底温度探针、声速探头、磁力仪等设备组成联合海底探测系统,实现对大洋的综合勘测调查。
2.5.2 系统组成
超短基线定位系统由水面船用设备和潜水器应答器组成。水面船用设备包括信号处理单元、船载声学换能器阵和外围辅助传感器。船载声学换能器阵安装在船舶底部或侧舷,由中心的发射换能器和四周的多个水听器组成。水下部分主要是指应答器,如果工作在同步时钟触发模式,还需包括同步时钟。
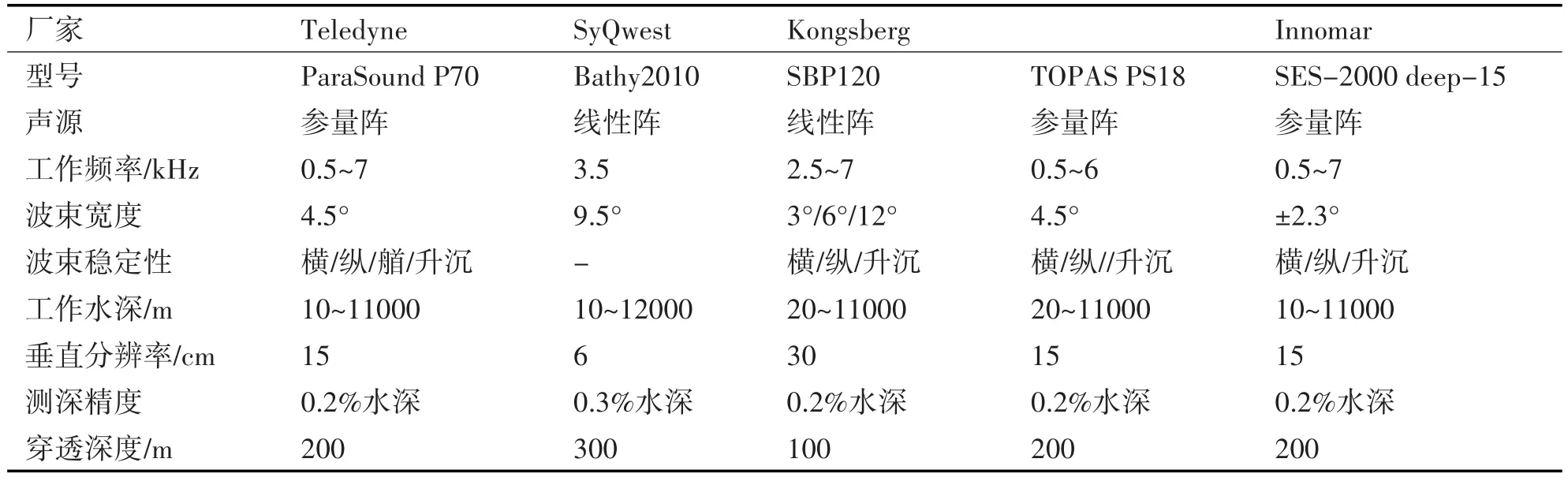
表2 典型深水浅地层剖面探测系统对比
2.5.3 典型系统
国际上主要的超短基线定位系统生产厂商主要有:iXblue、Kongsberg、Sonardyne、LinkQuest、Evo⁃logics等几家公司。表3给出了国外典型远程超短基线定位系统对比。超短基线定位系统需要从定位精度、作用距离、覆盖范围和是否具有通信功能等方面进行综合评估。总体而言,这三款远程超短基线定位系统各具特色:iXblue Posidonia II最大的特点是组合兼容性强,数据融合技术独特,当它与该公司的其他导航设备,如OCTANS运动传感器、PHINS惯导,联合使用时,性能可达到最优;特殊的换能器技术和先进的数字信号处理技术使得Kongsberg HiPAP102具有精度高、重复性好、可靠性高等特点;Sonardyne Ranger 2的数字通信速率达到1.5kbps-15kbps,真正实现了声学定位和高速数字通信的无缝衔接,而且基于多脉冲堆栈技术可以在任何水深环境下获得高达1 s的数据更新率;LinkQuest TrackLink 10000HA和Evologics S2CR 7∕17D更侧重于数字通信功能,其定位功能在深海方面的应用相对较少。
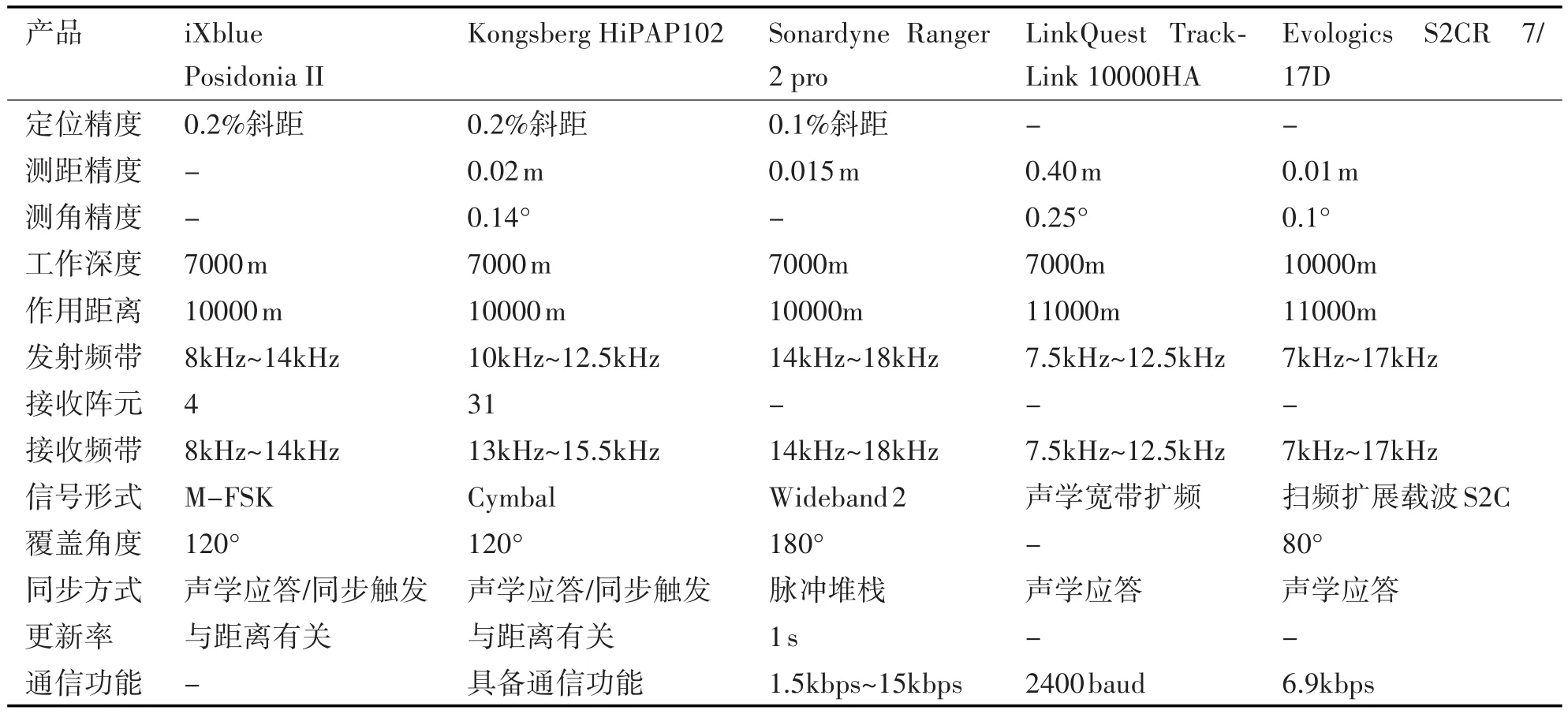
表3 典型远程超短基线定位系统对比
2.6 深海长基线定位系统
2.6.1 基本功能
长基线定位系统是超短基线定位系统的重要补充,其最大的优点是在较大范围内和在较深海水情况下,导航定位具有较高的精度,一般系统的作用距离可达十多千米,定位精度可达3m~5m。在载人潜水器作业支持领域,除需要超短基线系统了解与支持母船的定位位置外,还需要长基线系统为潜水器提供更精确的独立的定位保障平台,为载人潜水器在较大范围和在较深海水环境下提供高精度的导航定位数据,保障深潜作业安全性;在大洋科考领域,可用于AUV、ROV等水下探测设备的高精度水下定位。
2.6.2 系统组成
长基线定位系统包括两部分,一部分是水下移动载体上的问答机(收发换能器),另一部分是一系列已知位置的固定在海底的应答器,至少3个,并构成一定的几何形状。应答器之间的距离构成基线,基线长度在几百米到几公里,甚至几十公里之间。如果工作在同步模式,问答器和应答机上还需要分别配备高精度同步时钟。
2.6.3 典型系统
国际上主要的深海长基线定位系统主要有:iXblue RAMSES6000、Kongsberg cPAP、Sonardyne ROVNav 6。深海长基线定位系统需要从定位精度、作用距离和覆盖范围等方面进行综合评估。总体而言,iXblue RAMSES6000最大的特点是组合兼容性强,数据融合技术独特,可与iXblue公司的Posidonia II超短基线和PHINS惯导构成一套完整的模块化水下导航系统,提供稳健、高更新率的定位信息;Kongsberg cPAP系列长基线定位系统都拥有相同的软件和硬件平台,其声学定位操作站可以采用批处理方式对长基线阵型进行快速校准;So⁃nardyne ROVNav 6采用Wideband 2信号处理技术可以应对嘈杂的环境,其配套Compatt信标具备水声通信功能,具备阵型快速测量能力。
2.7 分裂波束声学探测系统
2.7.1 基本功能
分裂波束声学探测系统是进行环境探测的必要装备,主要用于不同游泳生物如鱼群类和大型浮游生物如磷虾的种类、数量与分布,评估生物种群大小及行动追踪。除此之外,分裂波束声学探测系统也可用于海底可燃冰、冷泉、热液等形成的羽状流、气泡团等的探测。
2.7.2 系统组成
分裂波束声学探测系统主要包括:对应不同频率的换能器、收发单元、操控台和外围辅助传感器(姿态传感器、导航系统等)。
2.7.3 典型系统
国际上主要的分裂波束声学探测系统主要有:SimradEK60和BioSonicsDT-X。其中BioSonicsDT-X主要是便携式投放,也可固定安装在船上使用,但其以前用户主要在湖泊和河流中使用,在海洋环境中能否进行长期工作需要检验;Simrad EK 60是一款适应海上长期工作的海洋生物资源声学探测仪器,其发射功率可调,数据采集范围大,且具有强大的特殊功能。国际上进行海洋生物研究的大型科考船大部分都安装的EK 500或EK 60(EK 500升级产品)。
2.8 船载走航式声学多普勒流速剖面仪
2.8.1 基本功能
船载走航式声学多普勒流速剖面仪(ADCP)是大型现代载人潜水器支持母船不可或缺的基本配置,主要用于深海海区海流流速流向的现场测量和分析。在载人潜水器作业环境保障领域,通过对作业海区海流情况进行精确测量和分析,为载人深潜作业的开展提供基础海流资料,实现载人深潜辅助调查研究,保障深潜作业安全性;在科学研究领域,利用该设备进行长期的观测可以积累大量各海区现场海流资料,为海洋动力、气候变化和海洋生物化学等海洋过程研究提供不可或缺的基础数据。
2.8.2 系统组成
走航式ADCP主要包括:换能器、收发单元、操控台和外围辅助传感器。
2.8.3 典型系统
国际上主要的船载走航式ADCP主要有:Tele⁃dyne RDI OS-38、Rowe Technologies Inc(RTI)、RT⁃DA40和杭州应用声学研究所SLC38。走航式AD⁃CP需要从测速精度、作用距离和分层数等方面进行综合评估。总体而言,杭州应用声学研究所SLC38型产品为国产仪器,已有应用先例;Tele⁃dyne RDI OS-38产品成熟,用户较多;RTI RTDA40作为即将推出的最新产品,参数指标优于前两者,但目前尚未推广使用。
2.9 水声通信系统
2.9.1 基本功能
水声通信系统用于在载人潜水器与水面支持母船之间建立实时通信联系。在下潜作业过程中,水声通信系统将潜水器的各种信息和现场图片准确传送到水面,供指挥部做出决策,指导水下作业;同时,潜航员与水面指挥人员通过语音、文字和指令通信可以随时就水下作业情况进行交流。水声通信系统也可用于其他水下载体的通信。
2.9.2 系统组成
载人潜水器水声通信机分为水面母船部分和潜水器部分。水面母船的水声通信系统包括1套吊放式水声通信机和1套船载式水声通信机。二者均可实现数据与语音的通信,可互为备份,提高可靠性。船载通信机安装于母船的底部,通过升降机构伸入水下,可以方便母船的航行操控,提高潜水器下潜的安全性。吊放通信机通过绞车和吊缆将水声通信机布放入水,可以通过放缆长度来控制通信机入水深度,降低噪声干扰,避开温跃层影响。
2.9.3 典型系统
目前,国际上其它载人潜水器都不具有水声图像传输功能。例如,美国阿尔文号载人潜水器上装有水声电话机,没有用于图像传输的水声通信设备。中国科学院声学研究所研发的综合水声通信系统的工作频率为8kHz~13kHz,最大作用距离为8 km~10 km,最大工作深度为7000 m。
3 载人潜水器支持母船声学系统安装方式
船载声学系统的典型安装方式主要有内嵌安装、导流罩安装、Gondola安装、升降鳍、通海井、声学吊阵和侧舷杆等。其中,前三种安装方式比较适合大型声学换能器阵安装,但需要进船坞维修;后四种安装方式适合中小型声纳换能器阵安装,其优点是可船上维修,而无需进坞。
深水多波束测深系统的换能器阵是最大的,它安装的要求也是最高的,主要有内嵌式、导流罩和Gondola等三种安装方式,具体选择哪种安装方案需要根据船体情况、经济性和声学设备性能等方面进行综合折中。中浅水多波束测深系统换能器尺寸小于深水多波束,其安装方式与深水多波束相同;深水浅地层剖面探测系统的换能器尺寸较大,主要采用与与深水多波束相同的安装方式;深水单波束测深系统、船载走航式ADCP和分裂波束声学探测系统一般采用升降鳍安装方式;超短基线定位系统一般采用通海井安装方式;两套水声通信系统分别采用通海井式和声学吊阵两种方式安装,互为备份;长基线定位系统不需要固定安装在船底。
4 结语
从狭义上讲,载人潜水器支持母船的声学系统主要用于载人潜水器支持和深潜作业环境调查,其中直接用于载人潜水器支持的有深海超短基线定位系统、深海长基线定位系统和水声通信系统,用于深潜作业环境调查的有深水多波束测深系统、中浅水多波束测深系统、深水单波束测深系统、深水浅地层剖面探测系统、分裂波束声学探测系统和船载走航式声学多普勒流速剖面仪。从广义上讲,这些声学系统也都可以用于执行大洋科学调查任务。
这些声学系统所能达到的性能,除了取决于设备自身的性能外,还与它们在船体上的安装方式、安装精度、船舶辐射噪声、船底气泡湍流等因素有关。
