空情数据融合的算法研究∗
2018-09-27罗德强屈剑波
罗德强 屈剑波
(71939部队 济南 250300)
1 引言
炮瞄雷达因为波束很窄,不具备大范围搜索目标的功能,需要依靠搜索雷达给炮瞄雷达提供空情数据,引导炮瞄雷达搜索、截获、跟踪目标[1]。随着新型武器系统的出现,其雷达功能也越来越先进,探测目标的精度也越来越高,不仅能为本级提供空情信息,也可以通过空情共享的雷达组网技术为炮瞄雷达提供空情信息支持。
同时,多雷达空情共享的组网技术可以有效对抗电子干扰,抗击低空超低空目标空袭。雷达组网能够构成全方位、多层次的战斗体系[2],提高雷达装备作战效能和战场生存能力。多雷达空情信息共享涉及到了空情数据融合问题,必须将各雷达平台的坐标系转换为融合雷达的坐标系。
利用GPS系统自身的定位功能确定各部雷达的经度、维度和高度信息,再通过WGS-84坐标系平移旋转得到目标在融合雷达中的坐标。该方法有效解决了因局部地理坐标平移产生的偏差,实现了组网雷达的空间对准问题[3]。
2 相关坐标及定义
2.1 地心直角坐标系
原点O与地球质心重合,Z轴指向地球北极,X轴指向起始子午面与赤道的交点,Y轴垂直于XOZ平面,并与XZ轴构成右手坐标系。任意一点的位置可以用(X,Y,Z)坐标来表示[4]。
2.2 WGS-84坐标系
WGS-84坐标系是一个地心坐标系,原点是地球质心,X轴指向BIH1984.0定义的零度子午面和赤道交点;Z轴指向BIH1984.0定义的协议地球极方向;Y轴构成右手坐标系[5]。其采用大地经纬度、大地高度来描述空间位置。其中大地经度L表示的是空间一点与参考椭球的自转轴所在的面与参考椭球的起始子午面的夹角;大地纬度B表示的是空间一点与参考椭球面的法线与赤道面的夹角;大地高度H表示的是空间一点沿参考椭球的法线方向到参考椭球面的距离[6]。
2.3 站心坐标系
站心坐标系,其原点位于地表,也称为东北天坐标系。如图1所示,E∕N∕U三个坐标,即代表了东北天三个坐标。该坐标系以站心(用户所在位置)为原点,N轴指向北极方向,U轴指向椭球体上穿过该位置的法线方向,E轴与N∕U两轴构成右手螺旋系。
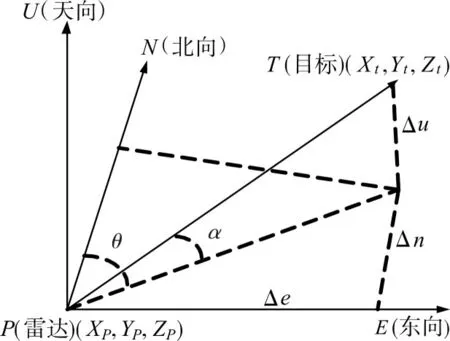
图1 站心坐标系
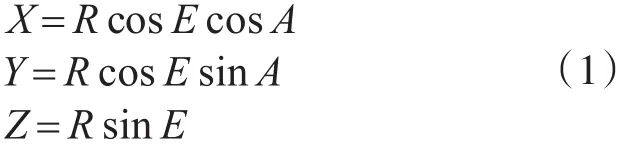
站心坐标系分为站心直角坐标系和站心球坐标系。站心直角坐标系是将目标的坐标投影到E∕N∕U坐标轴的值,用(X,Y,Z)来表示;站心球坐标系则用距离R、方位A、俯仰E来表述。球坐标系转换为直角坐标系的公式如下[7]:
3 坐标系转换分析
为了利用GPS信息进行空情数据融合,必须进行地心直角坐标系和雷达站心坐标系之间的转换[8]。以搜索雷达为例,其跟踪捕获的目标信息是雷达站心球坐标(R∕A∕E)。首先将其转换为雷达站心直角坐标,结合当前搜索雷达的GPS定位信息和目标的站心直角坐标,可以将目标坐标转换到地心直角坐标系中。根据炮瞄雷达的GPS定位信息和目标的地心直角坐标,可以将目标坐标转换到以炮瞄雷达为站心的东北天坐标系中,根据目标在东北天坐标系中的数据计算出其在融合雷达中的方位角和俯仰角。
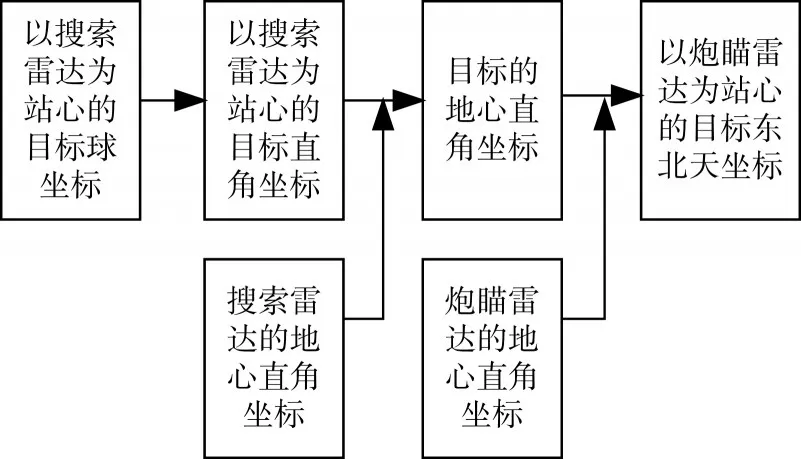
图2 坐标转换关系流程图
4 目标位置解算
4.1 搜索雷达WGS-84坐标转换为地心直角坐标
设搜索雷达处于地球某点P在地心直角坐标系内数据是 P(XP,YP,ZP),在地球WGS-84坐标系中的数据是P(BP,LP,HP),则两种坐标的转换关系是[9~10]:
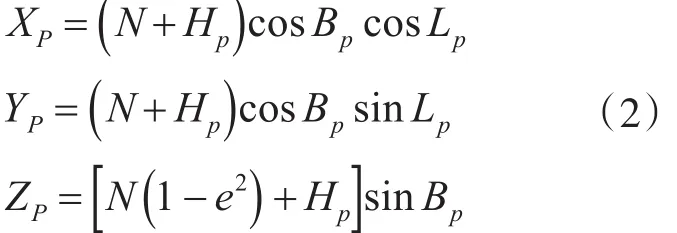
其中,N表示地球的曲率半径,第一偏心率e2=f(2-f),基准椭球长半径a=6 378 137m,基准椭球极扁率f=1∕298.257 223 563。

在WGS-84坐标系下B为纬度,L为经度,H为高度。
4.2 目标的站心球坐标转换为目标的站心直角坐标
搜索雷达获得的目标球坐标为(RP,AP,EP),通过式(1)转换为以搜索雷达为站心的直角坐标(Xt, Yt, Zt) 。
如图1所示,搜索雷达跟踪目标时,其连线与其在水平面的投影的夹角α就是目标的俯仰角,其投影与N轴的夹角θ就是目标的方位角。

有了雷达的观测向量[Δe,Δn,Δu]Τ,便可以计算目标T相对于雷达的方位角和俯仰角[11]。
4.3 目标的站心直角坐标转换为地心直角坐标
经过坐标的平移和旋转变换,求出目标T的地心直角坐标 [Xm,Ym,Zm]Τ:
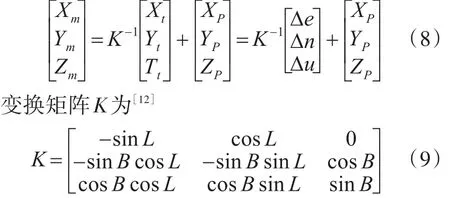
式中,B、L分别是WGS-84坐标系中的纬度、经度数值。
4.4 炮瞄雷达WGS-84坐标转换为地心直角坐标
设炮瞄雷达处于地球某点S在地心直角坐标系内数据是S(XS,YS,ZS),在地球WGS-84坐标系中的数据是S(BS,LS,HS),根据式(2)可计算出其地心直角坐标数据。
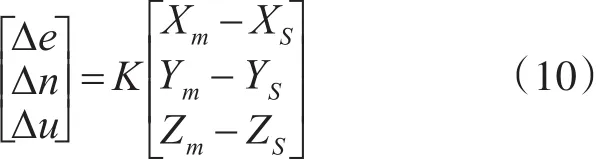
4.5 目标的地心直角坐标转换为以炮瞄雷达为站心的东北天坐标
根据式(8)可以计算出以炮瞄雷达为站心的东北天坐标:
由式(6)、(7)可以计算出目标相对于炮瞄雷达的俯仰角和方位角。
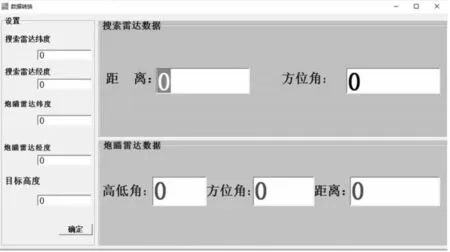
图3 空情数据转换系统
5 实施效果
通过该算法设计了空情数据转换的软件系统,通过接受其他雷达的空情信息,及时转换为融合的炮瞄雷达的目标空间信息,快速地为炮瞄雷达指明了目标的方位和俯仰角,引导炮瞄雷达及时截获和跟踪目标,取得了很好的效果。
6 结语
本文利用GPS技术,实现了雷达组网中的数据融合问题。利用该算法的空情数据转换系统,有效提高了炮瞄雷达捕获目标的能力,为实现复杂电磁环境下的空情保障提供了有力的技术支持。
