机器人红外视觉系统光机设计
2018-09-25陈淑玲林利芬
陈淑玲 赵 鑫 林利芬
(武汉软件工程职业学院,武汉 430205)
由于机器人红外视觉具有可以24小时全天候监控,探测距离远,不易受电磁干扰等优点,在机器人视觉系统应用中越来越多。为降低机器人红外视觉系统的成本、减小体积和重量,机器人红外视觉系统多采用高性能的非制冷红外探测器。
1 设计方案
由于机器人红外视觉系统的使用要求,内部空间小,所以,要求机器人红外视觉系统小型化、轻量化,同时为保证较远的探测距离,还要求具备较大的通光口径,而且要能适应高温、低温、冲击、振动等各种环境。
1.1 光学系统设计分析
为保证机器人红外视觉系统较大的探测距离,光学系统本身采用五片镜透射式结构,可得到较高的光学透过率,光学像差可以得到更好的平衡,成像质量能得到显著提高;同时,通过优化光学系统参数(曲率、间距、材料等)可相互补偿高低温时产生的离焦、色散等问题,如图1所示。
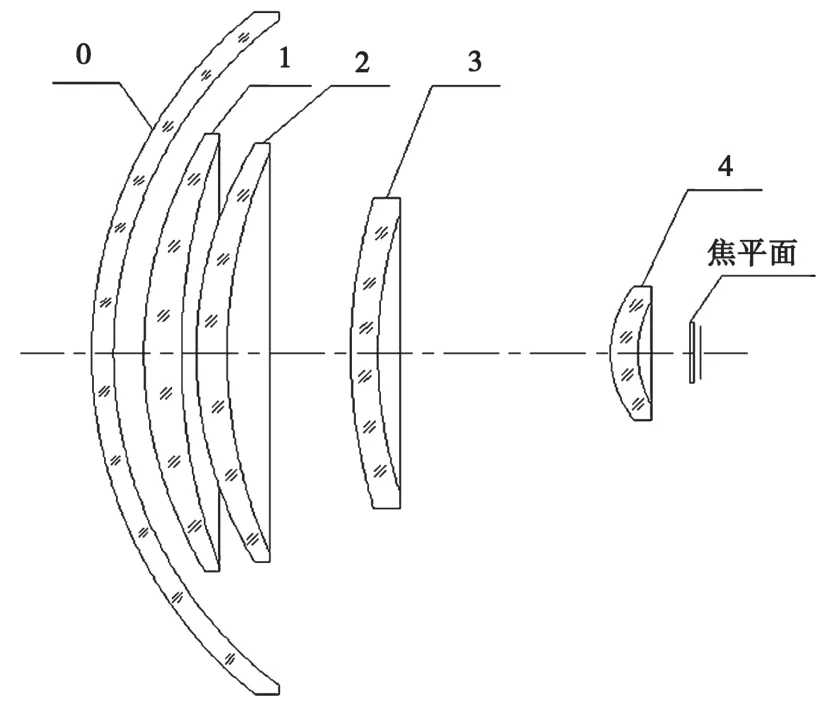
图1 光学系统图
由于观瞄装备需适应高温、低温等各种环境下的使用要求,光学系统需考虑无热化设计,在一个较大温度范围内保持稳定的像面位置和稳定的像质,目前的无热化技术主要有两类:机电主动式、光学被动式。机电主动式是指先由传感器探测出变化的温度,再由处理器计算出该温度对应的像面位移,最后由电机推动透镜产生相应的轴向位移进行补偿,机电主动式所需空间较大,不适合小型机器人红外视觉系统使用,且在恶劣环境环境下可靠性较低,而一旦发生意外,将造成严重后果。光学被动式是指使用不同特性的光学材料的合理组合,利用光学材料热特性之间的差异进行精密的光学设计,在平衡像差的同时消除温度的影响,获得补偿;具有结构简单、尺寸小、重量轻、无需供电、可靠性好等优点,非常符合观瞄装备小型化、轻型化的要求,而且更适合在恶劣环境下应用。
本方案采用光学被动补偿方式,光学系统在常温和高低温时像质不会有太大变化,如图2、图3所示。
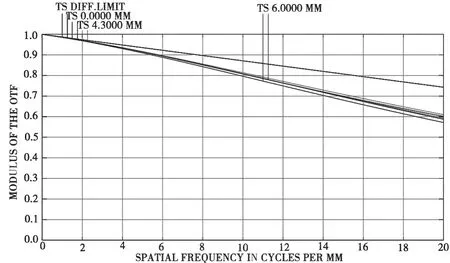
图2 -40℃时MTF

图3 60℃时MTF
1.2 光机结构设计
由于整机采用被动无热化设计,要求结构尺寸稳定性很高,第一片透镜到探测器焦平面最大距离为140mm,而镜片的安装精度为0.03mm,即结构件从-40℃到60℃尺寸变化不得大于0.03mm,要求选用的合金材料线膨胀系数小于2.14,且线膨胀系数要求较稳定,常用铝合金、钢线膨胀系数分别为27和10.2,不符合无热化设计的使用要求。
因此,镜筒等结构件采用优质低膨胀合金材料DP2,线膨胀系数为0.8,并且强度高,加上特殊结构设计使系统坚固结实,体积小,且整机采用化学氧化处理,保证整机结构能够适应战技指标要求的环境试验要求。
由图1可以看出,光学系统包括整流罩和四片透镜,热像仪需保证光学镜片间隔尺寸和同轴度、垂直度精度的同时,还必须保证热像仪和整流罩的旋转中心重合。镜筒在保证强度的前提下,采用了薄壁设计,尽量减小热像仪重量,同时镜筒内部设计成消光齿纹,减少杂光。
为保证镜片的装配精度,第一、二、三透镜与第四透镜分别安装在大小镜筒上,用中心偏装调保证同轴度、用高度计保证间隔尺寸在光学安装精度0.03mm内,最后将调试好的镜筒用销钉销牢后,固定在支架上,方便以后调整测试。为弥补因机加工及装配产生的误差,探测器可前后调整,测试红外热像仪NETD、MRTD指标,直至图像呈最佳效果。探测器采用加固及防震防冲措施,满足整机的环境与使用条件。
2 红外热像仪成像测试
2.1 指标测试
NETD和MRTD是综合评价系统温度分辨力和空间分辨力的重要参数,是衡量红外热像仪性能的重要指标。经过测试,本系统NETD=45mk,MRTD=350mk,成像效果优良。
2.2 作用距离测试
测试目标尺寸3m×2m,目标与环境温差5k,目标距离4km;环境温度28℃,湿度72%;经过实际测试,如图4所示,目标清晰可见,目标信噪比6.8,可有效探测目标。

图4 4km目标成像效果图
3 结语
本系统在设计过程中,对光学性能、结构设计、光机装调进行了充分考虑,对部分结构进行了优化设计;经过NETD、MRTD指标测试、外场作用距离实验验证,机器人红外视觉系统性能良好,可有效探测目标。