线缆搬运机器人手臂的机械系统设计
2018-09-22孙建宇
孙建宇
(江苏中利集团股份有限公司,江苏 常熟 215542)
传统人工搬运码垛存在劳动强度大、工作效率低等问题,用自动化程度高的设备来代替重复的体力劳动已成趋势。码垛机器人不仅可提高生产质量和生产率,而且保障了人身安全,改善了劳动环境,减轻了劳动强度,同时对于节约原材料消耗以及降低生产成本也有着十分重要的意义[1]。将工业机器人技术应用于运输工业领域,实现码垛作业的自动化,可以加快物流速度,获得整齐一致的物垛,减少物料的破损和浪费[2]。因此,就提高生产规模和生产效率而言,码垛机器人正发挥着越来越重要的作用,高性能、低成本的码垛机器人将具有广阔的应用市场[3-5]。本文结合电缆大规模生产的需求,设计了一种六自由度成卷线缆搬运机器人,并对关键部位的零部件进行工作能力校核。
1 机器人手臂结构设计要求
成卷线缆搬运作业对机器人的功能要求可归纳为:
1)成卷电线的夹持。需要考虑成卷电线的材质、质量和形状等物理特点(如外形尺寸和一定的柔性)以及完成包膜后的线卷位置与姿态。本文所述成卷电线的外形尺寸为内径135mm、外径250mm、高62mm、质量约10kg。成卷的电线由图1右边的自动包膜机包膜后侧立于包膜机导轨上,然后机器人末端执行器伸入成卷电线的内孔,采用膨胀法夹持(抓取)线卷。

图1 机械臂各工位布局
2)成卷电线的搬运和码垛。机器人手臂将线卷翻转至水平状态后送至图1左边铲板上(托盘)的特定位置,铲板尺寸一般为1 100mm×1 100mm×120mm,码放规格为4行4列10层。
机器人手臂结构设计时,需考虑搬运作业的环境、空间布局以及与周围已有设备的衔接和联动。具体注意点是:1)包膜装置有一定高度,机器人手臂在运动中,不能向后运动;2)包膜机外围有送线机构,高约160mm,机器人手臂动作时,应至少先垂直提升200mm才不会碰到设备;3)线缆属于电气安全产品,机器人手臂放下时,速度应缓慢,防止电线被挤伤;4)单卷线缆生产时间少于1min,故整个动作应该在30s内完成。
2 机器人手臂传动结构设计
根据初步确定的机械臂空间布局安排,考虑将大臂结构设计为L形,以减小对电机力矩的要求。机械臂的关节配置和运动简图如图2所示。
2.1 腰部关节

图2 机械臂的运动简图
机器人腰部关节的结构方案如图3所示,驱动电机固定在底座上,通过键与直齿圆柱齿轮相连,经一对速比为i=1的齿轮将力矩传递,驱动腰部运动。由于整个机身的质量很大一部分集中在腰部,因此要求腰部结构具有较高的稳定性。为了满足这一要求,将机座的上部设计为筒状结构,靠法兰与机座底部相连。为了便于定位安装,在底座下半部分与机座筒相接触的部位做一小段凹槽,同样的在机座筒底部做一块凸台。腰部的回转轴做成空心轴,在满足强度要求的基础上尽可能地减轻质量。轴上的零件通过轴肩以及套筒进行定位。考虑到轴承受力的特点,选用一对角接触球轴承,采用面对面的安装形式对轴进行支撑。内圈均靠轴肩顶住定位,下端轴承的外圈靠机座筒里的台阶挡住,上端轴承的外圈靠轴承盖压紧。轴承盖与轴承之间需要加密封圈。在腰部回转轴的最顶端,靠螺钉连接一个面积较大的回转平台,主要用于方便其他关节的支撑和安装。此外,为了增加机座的稳定性,在机座底部增加了若干辅助支撑,图中未标明。

1—回转平台;2—轴承盖;3—机座筒;4—角接触球轴承;5—传动轴;6—底座;7—直齿圆柱齿轮;8—键;9—驱动电机
2.2 大臂关节
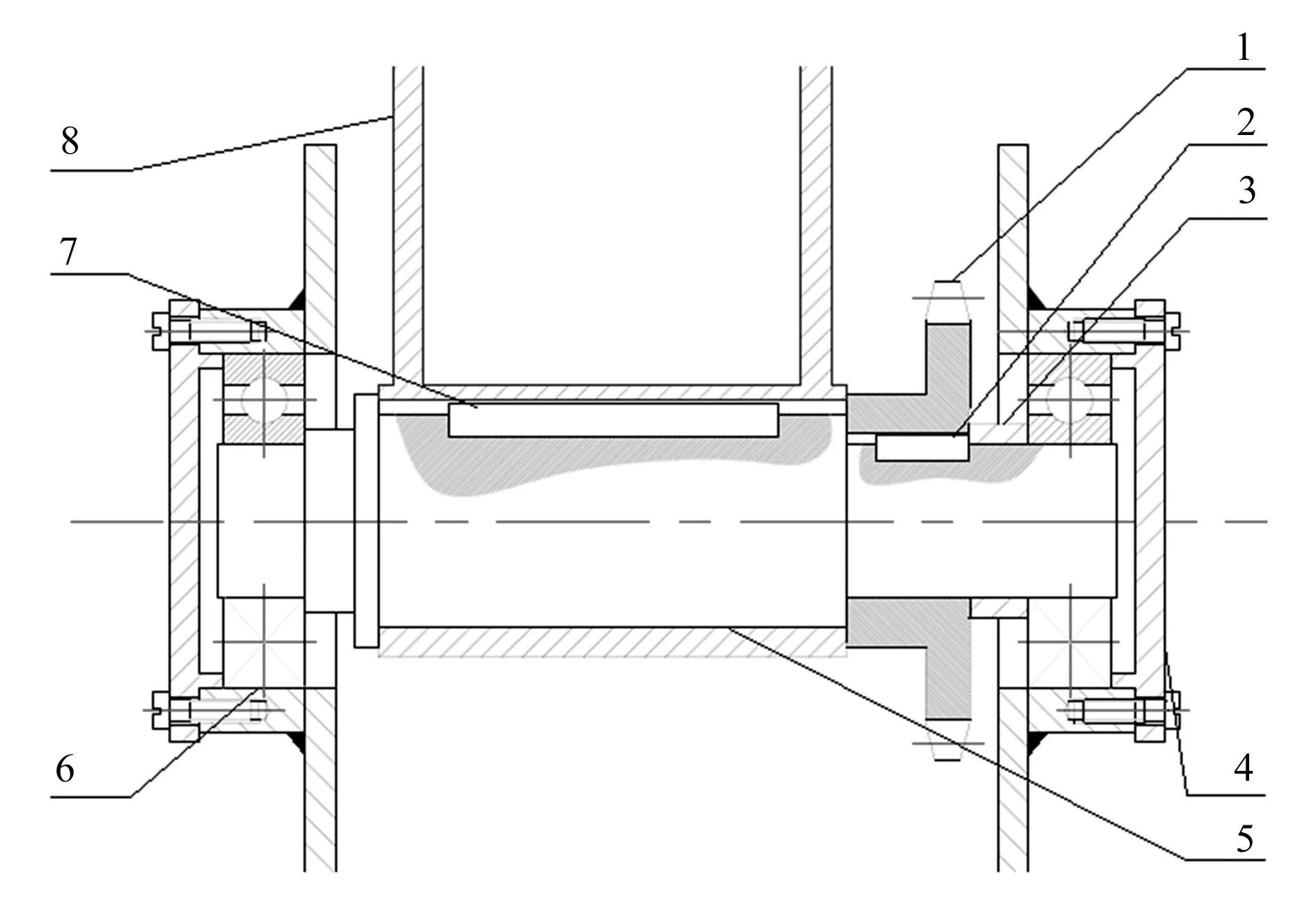
图4是大臂关节的局部二维图。对于大臂关节,电机通过键传递力矩,直接带动大臂运动,提高传递效率,同时大大缩短传动链。对大臂关节的支撑,主要是通过一对滚动轴承实现的。为了方便安装,设计了剖分式的轴承座。轴承的内外圈分别靠轴承座以及大臂上的台阶顶住实现固定。在轴承座的一侧,可以安装固定电机。

1—大臂;2—键;3—大臂电机;4—滚动轴承;5—轴承座;6—小臂电机;7—键;8—滚动轴承
2.3 小臂关节
图5体现了小臂的结构形式,小臂的运动是通过电机带动链轮实现的,电机与链轮通过键进行连接,该链轮的轴向定位通过一个套筒实现。小臂关节的驱动电机与大臂驱动电机同轴安装。
1—链轮;2—键;3—套筒;4—轴承盖;5—回转轴;6—轴承;7—键;8—小臂
驱动电机通过链轮将力矩传递到小臂回转轴,再通过键连接带动小臂运动。小臂的支撑是通过一对轴承实现的。轴承内外圈分别靠轴肩以及轴承盖顶住。小臂回转轴上的零件靠轴肩以及套筒定位。
2.4 机械臂三维模型
基于机械臂的结构方案和各关节的结构设计,构建的机械臂三维模型如图6所示。驱动电机安装于底座上,通过腰部关节驱动回转平台转动。大臂驱动电机和小臂驱动电机同轴安装于回转平台上,大臂驱动电机直接驱动大臂关节;小臂驱动电机通过链轮驱动小臂回转。

图6 机械臂三维图
3 电机选择及主要结构件工作能力校核
3.1 电机选择
机器人机械臂的静载荷主要包括线缆的重力和机械臂的重力。机械臂结构的自重负载可由平衡机构进行部分平衡,剩余自重负载可通过将线缆重力适当放大加以考虑。线缆的质量为10kg,为了使选择的电机能够充分满足工作要求,将工作负载放大为20kg。当机械臂均位于水平位置时,负载对关节产生的力矩最大,于是可以得到各关节电机的最大力矩如下。
关节3:
T3=20kg×10N/kg×(0.15m+0.85m)=200N·m
关节2:
T2=20kg×10N/kg×(0.15m+0.85m+0.9m)=380N·m
关节1:经查阅相关资料,关节1的负载力矩通常与关节2的负载力矩很接近,于是初步选取T1=T2=380N·m。
根据上面的力矩要求,查阅相关电机的参数资料以及产品介绍,选用带通用减速机的SGMGH 型伺服电机,能完全满足要求。
3.2 齿轮校核
1)齿轮的种类、材料、热处理方式以及精度的选取。
腰部关节(图3)采用一对齿轮传动主要是为了电机错位布置,不存在变速问题,故速比为i=1。由于传递的力矩比较大,因此齿轮的结构也比较大,故该齿轮选用锻造齿轮,材料为20CrMnTi。为了增强该齿轮的整体性能,采用表面渗碳淬火,使齿轮表面硬度达到260HBS。齿轮精度为6级,齿面粗糙度Ra=0.8μm,在齿根处进行强化处理(如喷丸)。
2)齿轮强度校核。
①根据选定的电机规格以及减速比,可以确定该对齿轮传动传递的转矩(即关节1的负载转矩)为T1=380 000N·mm。根据作业空间的限制,确定分度圆直径d1=d2=335.5mm,大小齿轮的齿数z1=z2=61,模数确定为m=5.5,齿宽为b1=65mm,b2=60mm。
②齿根弯曲疲劳强度校核。
根据机械设计手册确定齿根弯曲疲劳强度计算的使用系数KA=1.00,动载荷系数KV=1.07,齿间载荷分配系数Kα=1.0,齿向载荷分配系数Kβ=1.09,所以齿根弯曲疲劳强度计算的载荷系数为
K=KA×KV×Kα×Kβ≈1.17
计算圆周力Ft:
重合度系数Yε=0.67,应力修正系数YSa=1.95,齿形系数YFa=2.27。
由于两个齿轮仅齿宽不同,所以只需校核窄齿宽齿轮(图3中传动轴5上的齿轮7)的齿根弯曲强度。窄齿宽齿轮的齿根弯曲应力为
许用的弯曲应力
因此该对齿轮的齿根弯曲疲劳强度满足要求。
③齿面接触疲劳强度校核。
由机械设计手册可确定齿面接触疲劳强度的使用系数KA=1.00,动载荷系数KV=1.07,齿间载荷分配系数Kα=1.0,齿向载荷分配系数Kβ=1.09,所以齿面接触疲劳强度计算的载荷系数为
K=KA×KV×Kα×Kβ≈1.17
窄齿宽齿轮的齿面接触应力为

因此该对齿轮的齿面接触强度也满足设计要求。
4 结束语
本文针对工业生产中成卷线缆包膜后的搬运码垛要求,设计了一种六自由度关节式线缆搬运机器人,给出了主要关节的结构和驱动电机的规格型号,并对腰部关节中的齿轮传动机构进行了强度校核,确保其在强度方面能满足工作要求。
