不等跨变轴径四支承曲轴支反力分析计算
2018-09-22张顺平雷文刚
张顺平,雷文刚,李 奎
(重庆水泵厂有限责任公司国家企业技术中心,重庆 400033)
目前,在常用设计手册里[1-4]一般只能查阅到曲轴每跨跨距、轴径及载荷相同情况下超静定梁各支承处的支反力计算系数,不能查阅到不同跨距、轴径及载荷的支反力计算系数,因此给曲轴的受力分析及支承处轴承的寿命计算带来很大难度。为了解决这个问题,本文通过对“曲轴每跨跨距、轴径及载荷相同的超静定梁的支反力计算”模型的扩展,建立了“曲轴每跨跨距、轴径及载荷各不相同的超静定梁的支反力计算”模型,并建立了该模型下的支反力计算公式。
1 模型建立
曲柄连杆机构常被用作将旋转运动转化为往复运动的转换机构,而在曲轴上设计的连杆机构则是常见的一种结构布置形式。曲轴在旋转过程中,每一拐的连杆受力都随转角的变化而变化,因此曲轴两端及中间支承处的支反力也是随曲轴转角变化而变化[5]。为了能精确计算曲轴受力及曲轴支承处轴承受力,就需要根据每拐连杆随转角变化的力来分析计算曲轴各处的支反力。
曲轴的支承一般都是采用滚动轴承或滑动轴承,因此可以将曲轴支承简化为简支横梁的模型。而本文讨论的是四支承曲轴,因此属于横梁简支超静定的计算范畴。
为计算各支承处的支反力,本文中建立的计算模型满足以下条件:1)曲轴上有4个支承,且输入端为悬臂梁结构形式;2)每跨的跨距及轴径都不相同;3)每个载荷大小不同,且每跨最多受2个集中载荷及输入端受1个悬臂集中载荷(如皮带轮或外挂齿轮载荷)。
在曲柄连杆机构[5]的受力分析中,可将曲轴支反力简化为如图1所示的连续梁超静定简支梁模型进行计算。

图1 三跨四支承简支梁
该模型中符号的含义见表1。

表1 符号说明
2 受力分析与计算推导
2.1 标准三弯矩方程式
在材料力学及建筑结构静力学[1-2]中,其标准三弯矩方程如下:
(1)

2.2 虚反力计算模型
1)单跨中间1个虚拟集中载荷的虚反力。
在连续简支梁中[2],单跨1个虚拟集中载荷的虚反力模型如图2所示,其虚反力分别为:
①简支座A的虚反力。
(2)
②简支座B的虚反力。
(3)

图2 单跨1个虚拟集中载荷虚反力
2)单跨中间2个虚拟集中载荷的虚反力。
常规设计资料里[2-4],对连续简支梁只给出了“单跨对称2个虚拟集中载荷的虚反力计算”,未对“非对称2个虚拟集中载荷的虚反力计算”进行分析,本文结合“单跨中间1个虚拟集中载荷的虚反力计算”,分别按“F1与作用距离a”和“F2与作用距离b”的虚反力进行力的合成,其模型如图3所示,结合式(2)、(3)经过推导得:
①支承弯矩。
MA=MB=0
(4)
②简支座A的虚反力。
(5)
③简支座B的虚反力。
(6)
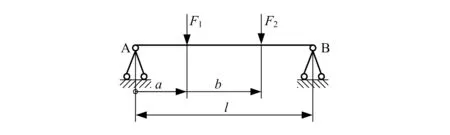
图3 单跨2个虚拟集中载荷虚反力
3)单跨一端1个虚拟弯矩载荷的虚反力。
在连续简支梁中[2],单跨一端1个虚拟弯矩载荷的虚反力模型如图4所示,其支承弯矩的计算公式与式(4)相同,虚反力的计算公式分别为:
①简支座A的虚反力。
(7)
②简支座B的虚反力。
(8)

图4 单跨一端1个虚拟弯矩载荷虚反力
2.3 建立中间各简支座的三弯矩方程式
图1中,由于连续支梁两端简支座0和3处没荷载[1],因此弯矩M0=M3=0,结合式(1)可以分别列出简支座1和2处的三弯矩方程式。
简支座1的三弯矩方程式:
(9)
简支座2的三弯矩方程式:
(10)
2.4 各外载荷对各简支座的虚反力计算
1)第1跨的虚反力计算。
该跨有载荷F1和F2,按照式(4)、(5)、(6)对第1跨求其虚反力:
(11)
(12)
2)第2跨的虚反力计算。
该跨有载荷F3和F4,按照式(4)、(5)、(6) 对第2跨求其虚反力:
(13)
(14)
3)第3跨的虚反力计算。
该跨的载荷有F5,F6及F7对简支座3的弯矩MF7=-F7a。因此先分别求出每个载荷对该跨的虚反力,然后将简支座A和B的虚反力合成。
①该跨载荷F5和F6对简支座A、B的虚反力,按照式(4)、(5)、(6) 对第3跨求其虚反力:
(15)
(16)

②该跨载荷MF7=-F7a对简支座A、B的虚反力,可按照式(7)、式(8) 对第3跨求其虚反力:
(17)
(18)

根据式(15)~(18),即可以求出该跨总的虚反力:
(19)
(20)
2.5 各简支座弯矩的计算
将式(11)~(20)代入式(9)和式(10)中求解得到各简支座的弯矩:
2.6 各简支座支反力的计算
根据外载荷F1~F7及式(21)中的各弯矩,可以求解各简支座的支反力。
1)简支座0处支反力计算。
在简支座1处将连续简支梁截断,取左边杆件进行分析。因为R0l1-F1(l1-a1)-F2(l1-b1)=M1,所以有
(22)
式中:Ri为支座i处的支反力,i=0,1,2,3。
2)简支座1处支反力计算。
在简支座2处将连续简支梁截断,取左边杆件分析得:
R0(l1+l2)+R1l2-F1(l1+l2-a1)-F2(l1+l2-b1)-F3(l2-a2)-F4(l2-b2)=M2
所以有
(23)
3)简支座2处支反力计算。
在简支座3处将连续简支梁截断,取右边杆件分析。因M3=-F7a,分析得:
R0(l1+l2+l3)+R1(l2+l3)+R2l3-F1(l1+l2+l3-a1)-F2(l1+l2+l3-b1)-F3(l2+l3-a2)-F4(l2+l3-b2)-F5(l3-a3)-F6(l3-b3)=M3
所以有
R2=

(24)
4)简支座3处支反力计算。
在简支座2处将连续简支梁截断,取右边杆件进行分析。因R3l3-F3a3-F6b3-F7(l3+a)=M2,所以有
(25)
3 公式验证
3.1 验证方法
1)按《机械设计手册》中特例进行验证。
令F1=F3=F5=F,F2=F4=F6=F7=0,b1=b2=b3=a=0,I1=I2=I3=I,l1=l2=l3=l,a1=a2=a3=l/2。将按本文公式计算得到的结果与按《机械设计手册》[4]计算得到的值进行比对,结果见表2。

表2 与《机械设计手册》算得支反力的比对结果
2)用MADYN2000转子动力学专用软件进行验证。
令F1=1 000N,F2=1 500N,F3=2 000N,F4=2 500N,F5=3 000N,F6=3 500N,F7=1 200N,l1=l2=l3=150mm,a=200mm,a1=a2=a3=50mm,b1=b2=b3=105mm,第1跨外径do1=90mm、内径di1=45mm,第2跨外径do2=105mm、内径di2=45mm,第3跨外径do3=120mm、内径di3=45mm,悬臂端外径do4=90mm、内径di4=45mm。分别用MADYN2000转子动力学专用软件与本文计算公式进行计算比对,其比对情况如下:
①通过转子动力学专用软件MADYN2000建立模型,模型及计算结果如图5所示。

图5 MADYN2000软件建模及计算结果
②比对两种计算方法获得的支反力结果。
本文公式与MADYN2000转子动力学专用软件计算得到的支反力比对结果见表3。
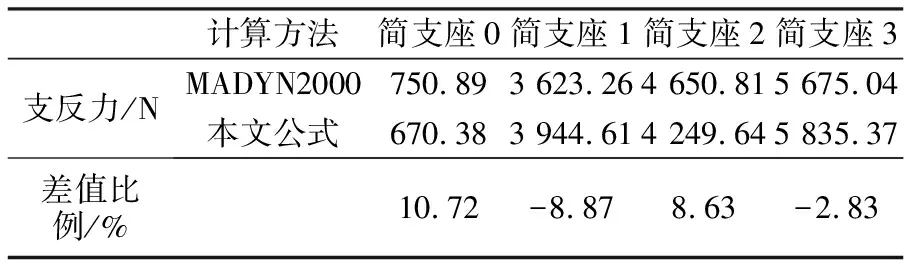
表3 与MADYN2000转子动力学
3.2 验证结果分析
《机械设计手册》中是直接给出支反力系数,没有给出计算公式,因此采用特例验证方式验证了本文公式的正确性。
由于MADYN2000转子动力学专用软件采用的是有限元计算分析法,在计算时边界条件有细微差异,导致结果也有一定偏差,但二者的计算结果是高度吻合的。
本文计算公式是用三弯矩方程求解简支梁理论推导出来的,该公式的计算结果与《机械设计手册》结果完全吻合,且与MADYN2000转子动力学专用软件计算结果高度吻合,由此可知,本文计算公式是完全正确的。
4 结束语
本文介绍的不等跨变轴径四支承曲轴支反力分析计算方法,为四支承曲轴支反力计算提供了快速、精确的计算依据,也为以后曲轴及轴承受力分析提供了可靠的数据,具有较高的工程实际意义。由于本文只是从理论上进行研究,与实际应用可能还存在一些差异,以后可结合工程实际应用进行验证以获得修整系数,使其达到与工程实际应用的高度吻合。
