一种智能步兵雷的防拆装置
2018-09-20傅国强华宇宁武永健郝永平张德育
傅国强,华宇宁,武永健,郝永平,张德育,白 帆,刘 猛
(沈阳理工大学 自动化与电气工程学院,辽宁 沈阳 110159)
传统地雷主要由雷壳、炸药、机械传动起爆装置组成[1].雷壳作为地雷的最外层防护装置只是机械的组装、消极的防御部件,极易被工兵拆除,起不到对地雷的有效保护作用.此外,机械传动起爆装置的力学特性决定了其自身存在致命缺陷,即地雷铺设之后不可控,地雷不能根据我方需要及时捕捉战机来应对工兵破坏.近年来,多在电子设备内部设置机械式安全检测开关.机械式安全检测开关由安全触点与导电触头构成.机械式检测方法简单有效,但也存在一个缺陷,即无法有效避免机械式安全开关引起的误触发,设备在使用、存储、运输过程中,均可能由剧烈振动、环境温湿度变化等导致导电触头与安全触点之间的短暂分离而产生误动作.传统地雷的弊端[2]难以适应现代战场.针对传统地雷的改进,国内外科研院所此前曾取得一些成果[3],将机械触发装置改进为电气触发装置,增加防拆装置,用电信号起爆替代机械传动起爆装置.目前,地雷已开始向智能化、非致命化、可控制方向发展.
1 智能步兵雷的核心电路
智能步兵雷的核心电路如图1所示.其硬件平台采用的是S3C2416控制器,配置GPS模块;软件平台为Linux2.6.21;自组网路由协议为AODV[4].每个智能步兵雷都拥有独立的S3C2416核心电路.其微控模块采用的是三星公司生产的S3C2416 ARM926芯片(其主频为400 MHz),运行内存选用三星公司的K4T51163 DDRII266 64MByte RAM内存,程序存储选用三星公司的256 MB的NAND FLASH,并且支持扩展存储设备.
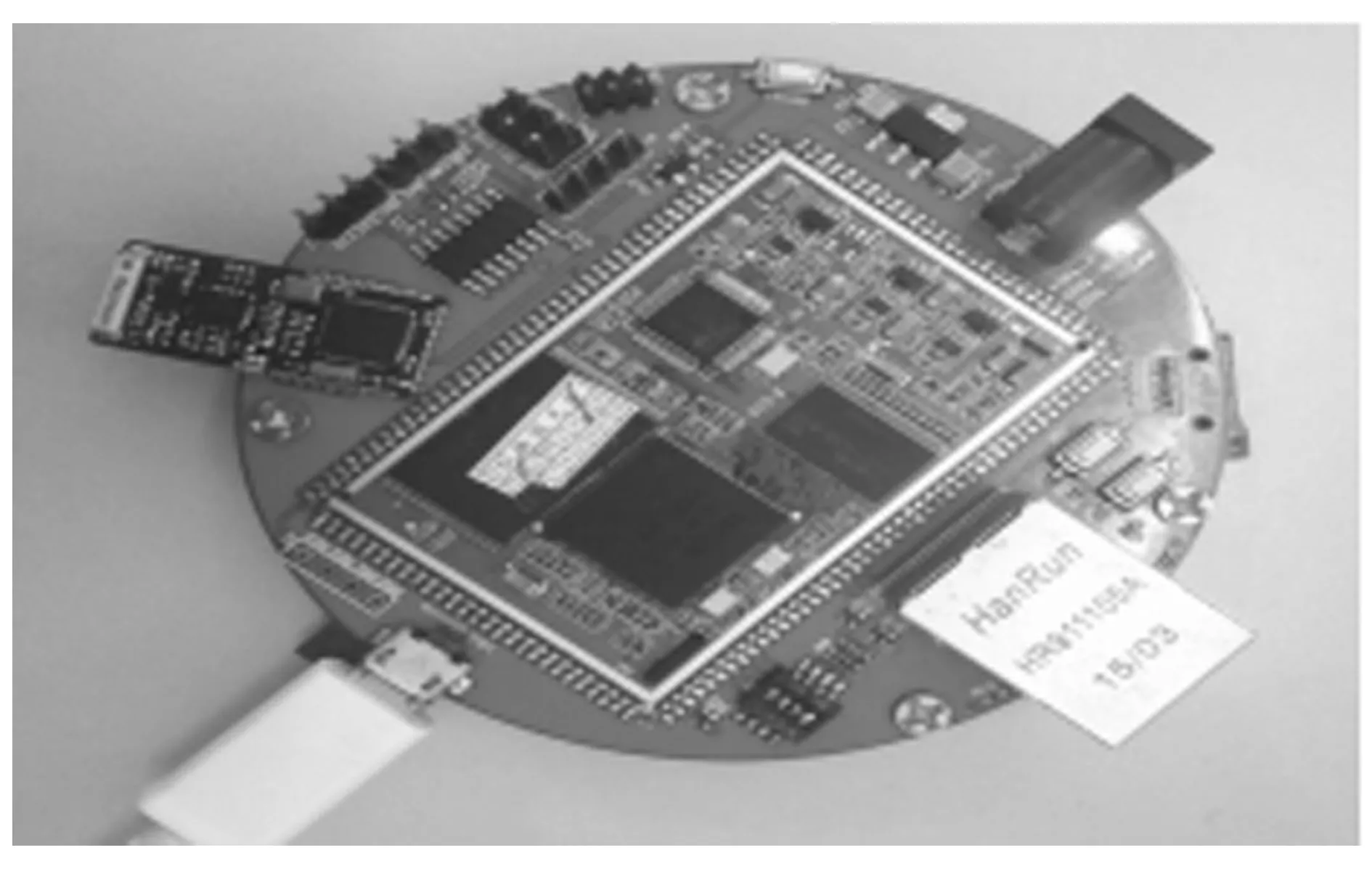
图1 智能步兵雷核心电路实物图
2 防拆装置的设计
2.1 电气防拆装置
智能步兵雷的控制电路能够通过I/O引脚检测防拆装置的状态信息.智能步兵雷的I/O引脚有20个,接收的电信号电压等级为直流3.3 V.智能步兵雷的I/O引脚如图2所示.
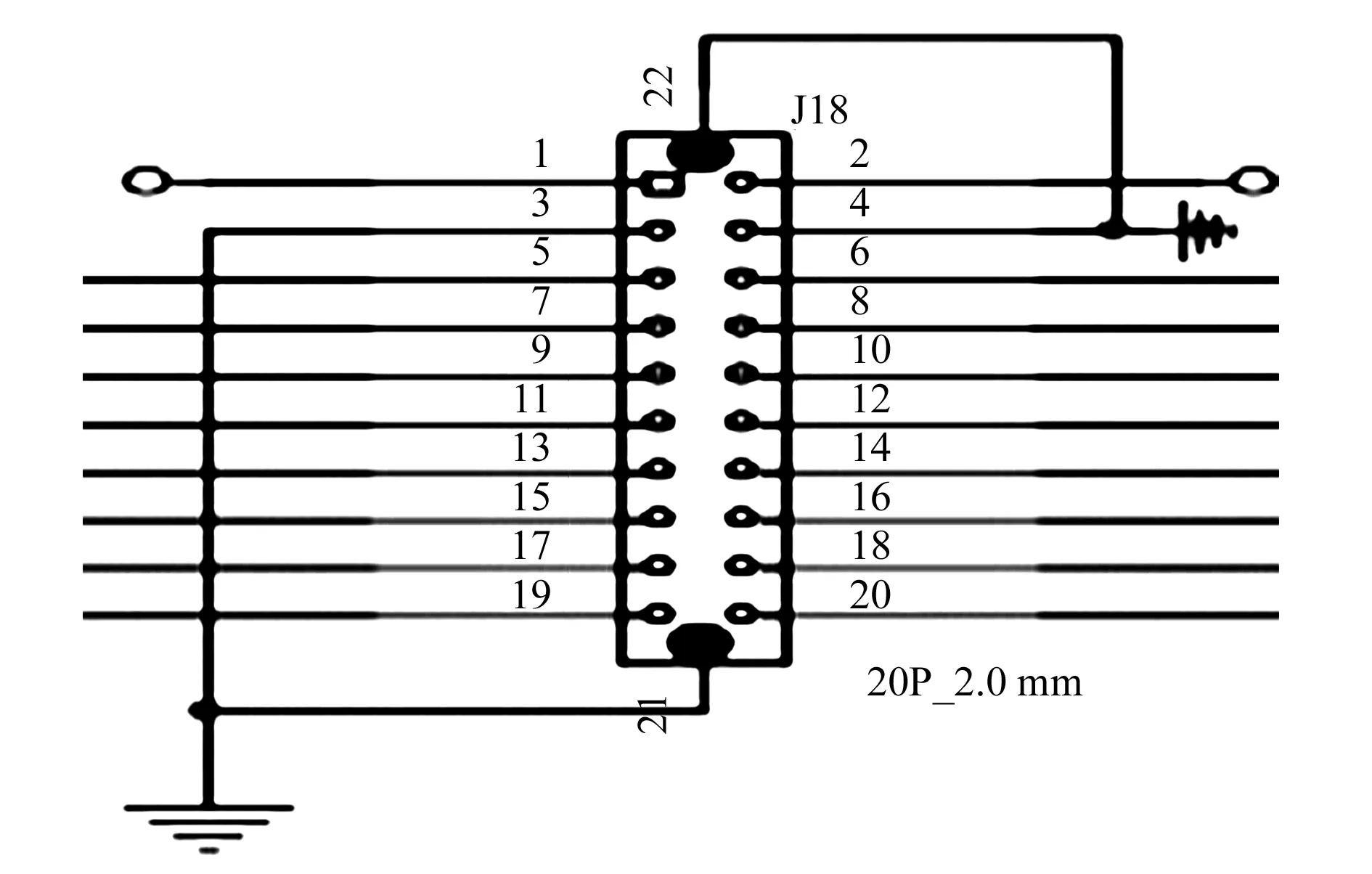
图2 智能步兵雷的I/O引脚
将智能步兵雷控制电路的第9个和第12个I/O引脚可作为防拆装置的信号采集引脚.雷壳由4颗固定螺栓固定,每颗固定螺栓下面都有一个独立的防拆装置.在智能步兵雷的正常值守期间,电气防拆装置的驱动程序在对应I/O引脚信号线上采集低电平信号.当工兵对智能步兵雷进行拆除时,防拆装置的感应部件会产生抖动.这种抖动造成I/O引脚采集的电位波动,电气防拆装置的驱动程序会将高电平信号以中断的方式通知智能步兵雷的S3C2416核心电路,然后无延迟起爆智能步兵雷战斗部.电气防拆装置的程序流程如图3所示.

图3 电气防拆装置的程序流程
2.2 机械防拆装置
为进一步保护雷区,在智能步兵雷中设计了机械防拆装置.机械防拆装置被安装在智能步兵雷的雷壳夹缝中,其动作原理相当于一个机械按键.在正常情况下,智能步兵雷的机械防拆装置输出的是低电平信号,当对方工兵试图拆除智能步兵雷而拔出雷壳上的固定螺栓时,上下雷壳分离,机械防拆装置会自动弹起,并且产生一个高电平信号,机械防拆装置的驱动程序因收到高电平信号的上升沿而产生中断,通知智能步兵雷S3C2416核心电路,无延迟起爆智能步兵雷战斗部.机械防拆装置的程序流程如图4所示.
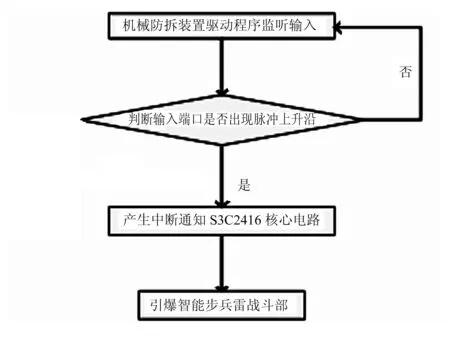
图4 机械防拆装置的程序流程
智能步兵雷防拆装置的信号以中断方式通知S3C2416核心电路,不必浪费时间和资源去查询防拆装置的状态.在防拆装置有请求服务时,向S3C2416核心电路发出中断请求,该核心电路会停止执行当前程序而优先响应防拆装置的中断信号,因此提高了防拆装置的灵敏性和动作实时性.
3 防拆装置的结构及其灵敏性分析
3.1 防拆装置的结构
智能步兵雷防拆装置的电路结构如图5所示.

图5 防拆装置的电路结构
无论工兵先剪断防拆装置的信号采集线,还是先拔出固定螺栓,都会在智能步兵雷防拆装置上产生一个微小的断点电容C,断点电容C随即被充电,产生高电平信号和高电平的上升沿信号.断点电容形成后的防拆装置电路结构如图6所示.
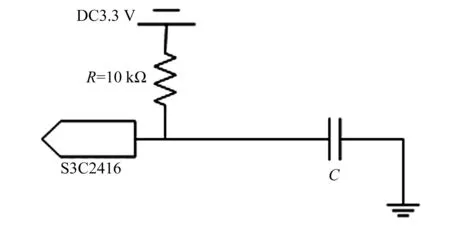
图6 防拆装置出现断点电容后的电路结构
断点电容C可近似用平板电容模型进行求解,即:假设断点电容C的两极间没有任何介质,是真空的,断点电容C的两极板正对面积为s,两极间距离为d,则:
(1)

当两极间充满空气介质时,电容值增大为真空电容值的ε倍.ε为常数,与介质的性质有关(空气的相对介电常数为1.000 58),称为相对介电常数.那么,断点电容的计算公式可简化为:
(2)
3.2 防拆装置的灵敏性
对形成断点电容的防拆装置结构进行数学建模,可得到智能步兵雷防拆装置的运算模型(图7).

图7 防拆装置的运算模型

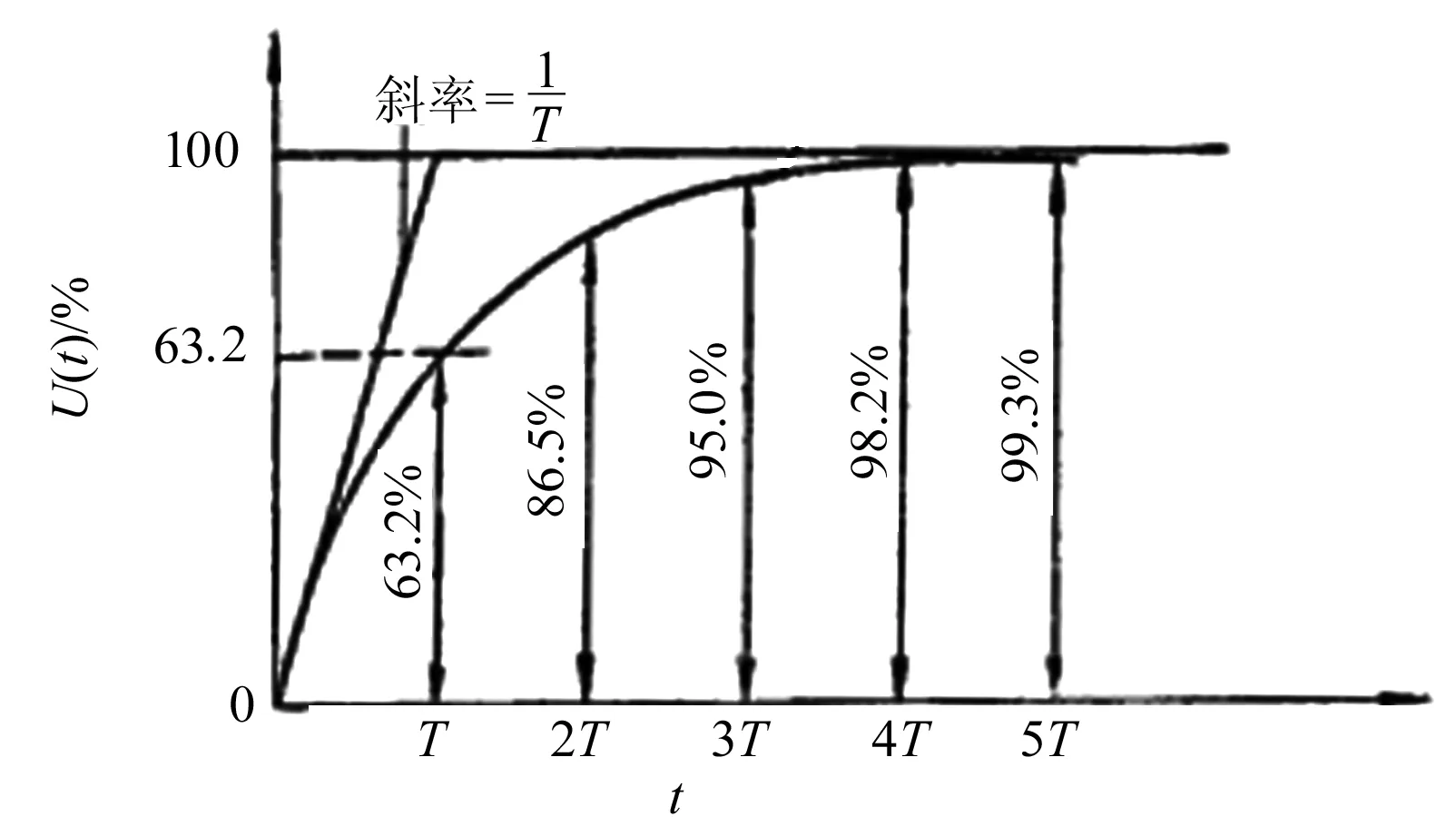
图8 优化前防拆装置的单位阶越响应曲线
从图8可看出,智能步兵雷的防拆装置为一阶系统.在3.3 V直流电源的作用下,其阶跃响应曲线从初值0上升到3.3 V直流电压的63.2%、86.5%、95.0%、98.2%、99.3%,所需时间分别为过渡过程T、2T、3T、4T、5T.
设断点电容C的极板正对面积s=1 mm2,板间距离d=1 mm,则一阶系统的时间常数为:
T=8.86×10-8s.
总之,智能步兵雷的防拆装置以电信号起爆替代机械传动起爆,从满足实战要求出发,还需要改善防拆装置的实时性和灵敏度,进一步提升智能步兵雷的反应能力.本文对该防拆装置的结构进行了优化.
4 防拆装置的结构优化
4.1 优化后电路模型
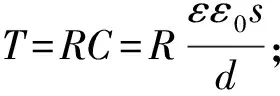
为提高防拆装置的反应速度,在防拆装置上增加一个串联电感L.在断点电容C充电时,防拆装置中存在两个串联储能元件.此时,防拆装置可作为一个二阶系统(图9)看待.
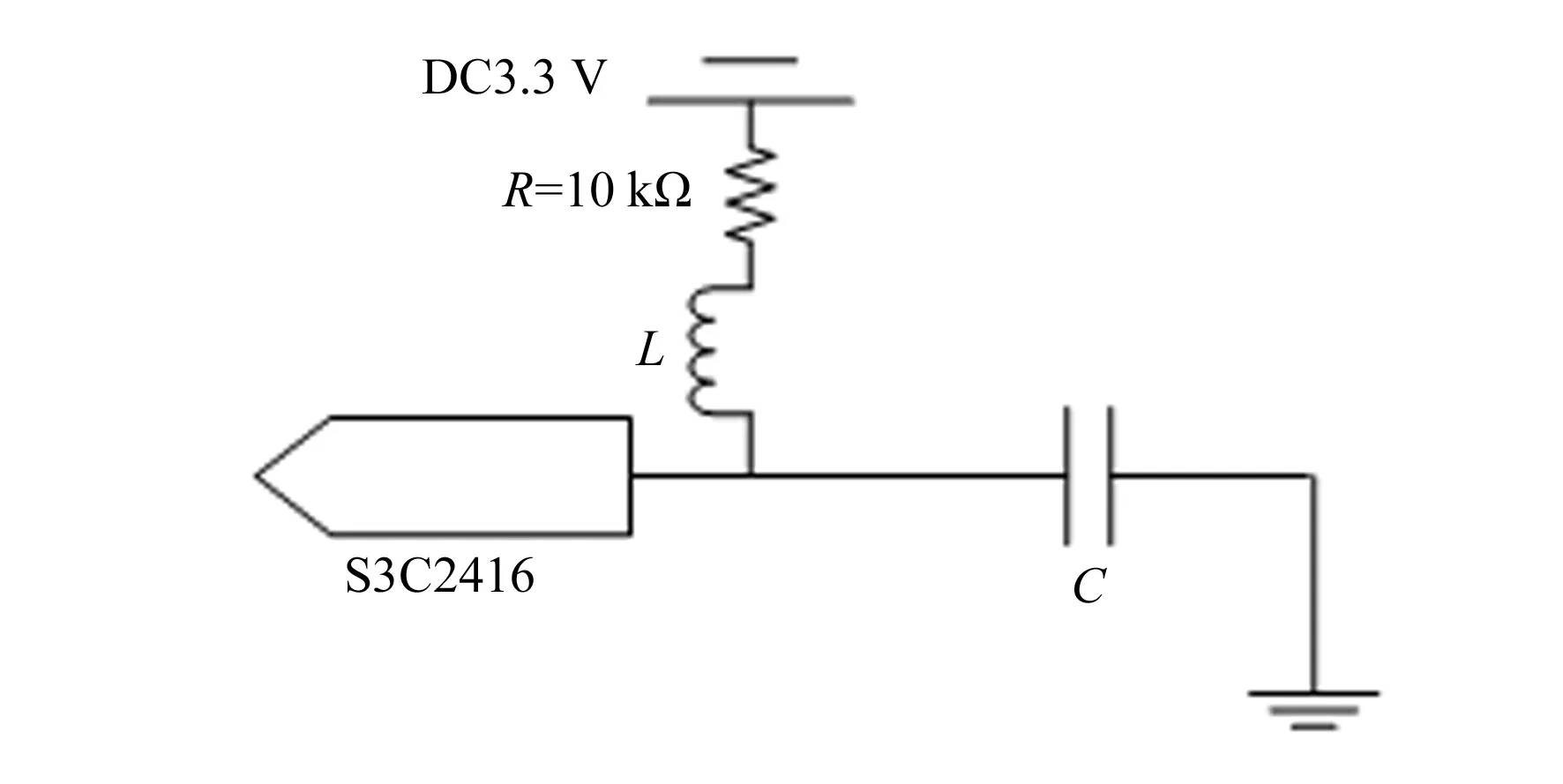
图9 优化后防拆装置电路结构
4.2 优化后运算模型
对优化后防拆装置的电路进行数学建模,可得图10所示的防拆装置运算模型.
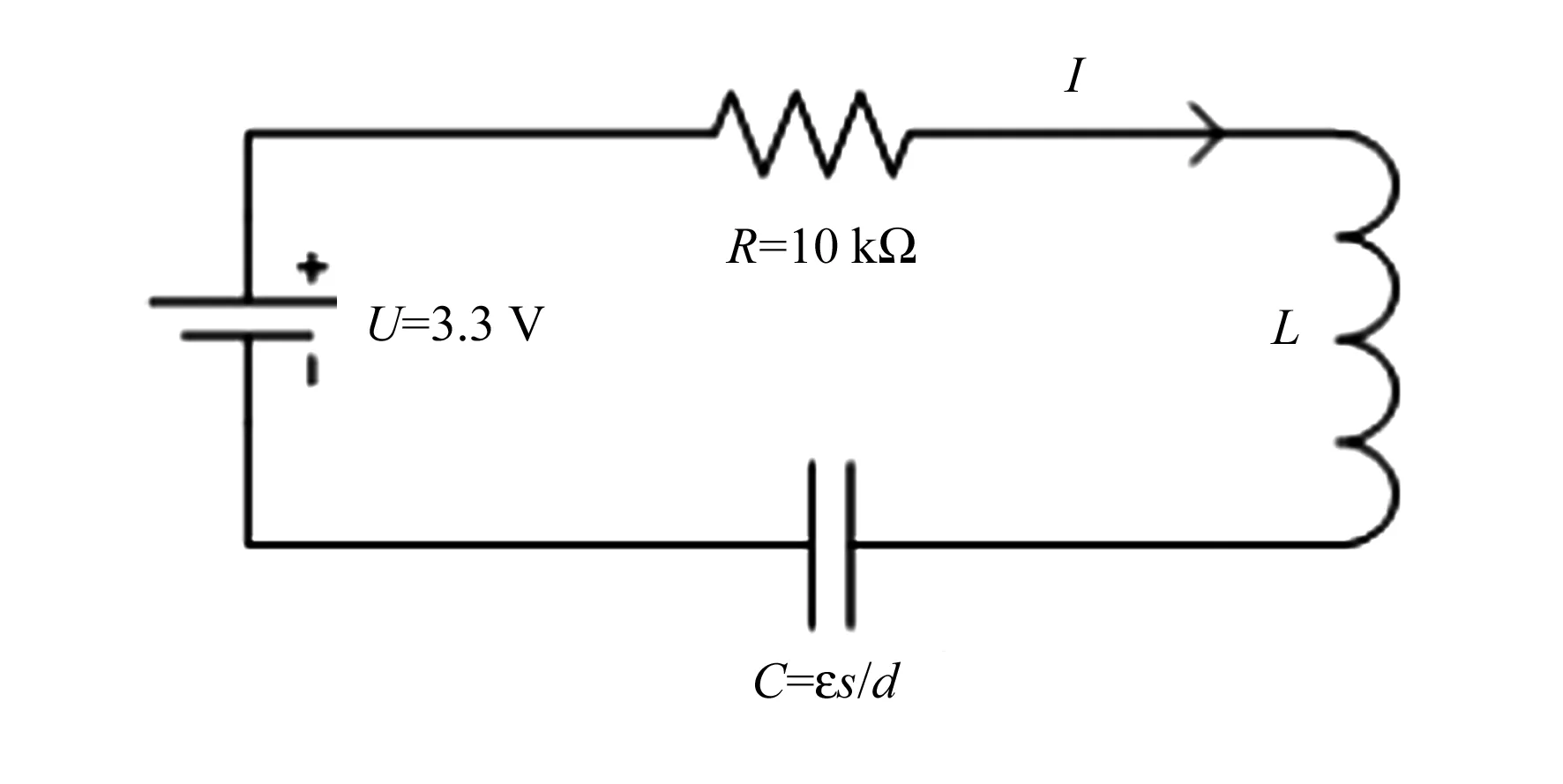
图10 优化后防拆装置运算模型
5 优化后防拆装置的性能分析
优化后防拆装置的基尔霍夫电压方程为:
(3)
式中:UC为断点电容两端电压;U为防拆装置的输入电压;R=10 kV,为串联电阻;t为时间.
对式(3)进行拉氏变换得:
(4)
优化后防拆装置的传递函数为:
(5)

防拆装置等同于一个二阶系统,当系统输入为单位阶跃函数,即输入为1 V时,输出的频域响应[5]为:
(6)
对式(6)进行拉氏反变换,则输出的时域响应为:
(7)
优化后防拆装置的阶跃响应波形如图11所示.其输出为电压信号(V).

图11 优化后防拆装置的阶跃响应波形
优化后防拆装置的阶跃响应曲线在振荡环节的阻尼比ξ越大,响应速度就越慢.当L=0,即智能步兵雷的防拆装置结构未优化时,ξ=∞,防拆装置为一阶系统,其阶跃响应曲线上升速度慢,输出响应输入的效果不佳.优化后防拆装置为二阶系统,响应速度提高,防拆装置能快速地响应外界工兵对智能步兵雷的破坏,但会出现较大的超调.由此可见,振荡环节的阻尼比ξ越小,输出响应输入的速度越快,能越早到达输入的值,即反应速度越快.但是,振荡环节的阻尼比并非越小越好,因为ξ越小则输出曲线超调越大.I/O引脚的额定电压为3.3 V,如果I/O引脚电压输入超过5 V就可能造成智能步兵雷的核心电路烧毁,导致智能步兵雷失控.因此,该二阶系统的阻尼比必须满足条件:ξ>2,即超调量不得大于输入的50%[5].
6 结束语
传统地雷以机械方式触发,触发方式单一,因雷壳构造简单而极易被工兵拆除.本文在智能步兵雷上增加S3C2416核心电路,移植linux2.6.21操作系统,并设计防拆装置后,提升了智能步兵雷自身防御性能,可更有效地应对工兵破坏,增强智能步兵雷的战场生存能力和适应能力.
